Directed evaluation |
|
| Final version of October 2020 |
|
 . This paper is
part of a project that has received funding from the French
“Agence de l'Innovation de Défense”.
. This paper is
part of a project that has received funding from the French
“Agence de l'Innovation de Défense”.
Let
|
Let  be an effective field. Here,
effective means that elements of can be
represented by concrete data structures and that algorithms for the
field operations are at our disposal, including a zero-test. Effective
rings are defined in a similar way.
be an effective field. Here,
effective means that elements of can be
represented by concrete data structures and that algorithms for the
field operations are at our disposal, including a zero-test. Effective
rings are defined in a similar way.
The aim of the present paper is the fast computation with algebraic numbers. We start by recalling various known strategies, including the most prominent one: dynamic evaluation. Our first main problem will be to develop a more efficient variant of dynamic evaluation. We next recall how to represent algebraic numbers using towers of algebraic extensions. Our second main problem is to develop efficient algorithms for computations in such towers.
 be a monic separable polynomial of degree
be a monic separable polynomial of degree
 in
in  ,
not necessarily irreducible, and let
,
not necessarily irreducible, and let  represent
a root of in the algebraic closure
represent
a root of in the algebraic closure  of . Given an
algorithm
of . Given an
algorithm  that runs over a generic effective
field, consider the question of running
efficiently over
that runs over a generic effective
field, consider the question of running
efficiently over  .
.
A natural first approach begins with the computation of the defining
polynomial of over :
this essentially corresponds to factoring into
irreducible polynomials. Unfortunately this task is not feasible over a
generic field [19, 20]. Of course, when is explicitly finitely generated over its prime
sub-field, such factorizations can be computed. However, no general
efficient algorithms (i.e. running in softly linear time)
are currently known for this task; see [21].
Another approach consists in computing in  while
regarding
while
regarding  as a parameter constrained by
as a parameter constrained by  . So any element
. So any element  in is represented by a polynomial
in is represented by a polynomial  in of degree
in of degree  , such that
, such that  .
With this representation, additions, subtractions and products can
easily be performed in
.
With this representation, additions, subtractions and products can
easily be performed in  , with
seen as the class of
, with
seen as the class of  . On the other hand, testing whether
. On the other hand, testing whether  is zero or not requires us to distinguish the following
cases:
is zero or not requires us to distinguish the following
cases:
If is the zero polynomial, then  is zero for any root of
, so the result of the
test is “
is zero for any root of
, so the result of the
test is “ ”;
”;
If the resultant  is non-zero, then is non-zero for any root
of , so the result of
the test is “
is non-zero, then is non-zero for any root
of , so the result of
the test is “ ”;
”;
Otherwise,  is not a constant polynomial
and has degree . A
proper decomposition of is thus
discovered:
is not a constant polynomial
and has degree . A
proper decomposition of is thus
discovered:  . We
split the current computation, into the two following
ones:
. We
split the current computation, into the two following
ones:
In the first branch, is subjected to
the constraint  ; in
this branch, the result of the zero-test
; in
this branch, the result of the zero-test  becomes “”.
becomes “”.
In the second branch, is subjected to
the constraint  and the result of the
zero-test becomes “”.
and the result of the
zero-test becomes “”.
If the inverse of is requested, then we first
test if is zero or not. If
is identically zero (in the resulting branch), then an exception is
raised; if is non-zero, then the inverse can be
computed from the Bézout relation for and
, which can itself be
computed using the extended gcd algorithm.
This manner of evaluating a program is called dynamic
evaluation. It finishes after a necessarily finite number of
splittings. At the end of all the computations, we obtain a
factorization of  , not
necessarily into irreducible polynomials, along with one output value
for each of the
, not
necessarily into irreducible polynomials, along with one output value
for each of the  cases when
cases when  for
for  . In other words, instead
of working with a specific root of ,
the program is evaluated for a generic root of . For this reason, is
sometimes called an algebraic parameter: the program is
executed as if were a field, and cases are
distinguished only when inconsistencies actually occur during the
execution. After a zero test
. In other words, instead
of working with a specific root of ,
the program is evaluated for a generic root of . For this reason, is
sometimes called an algebraic parameter: the program is
executed as if were a field, and cases are
distinguished only when inconsistencies actually occur during the
execution. After a zero test  or an inversion
or an inversion
 that gives rise to a splitting, the element is enforced to be identically zero or invertible in
each branch. Notice that the separability assumption on
is important, since it ensures that
that gives rise to a splitting, the element is enforced to be identically zero or invertible in
each branch. Notice that the separability assumption on
is important, since it ensures that  and
and  are coprime in the above decomposition .
are coprime in the above decomposition .
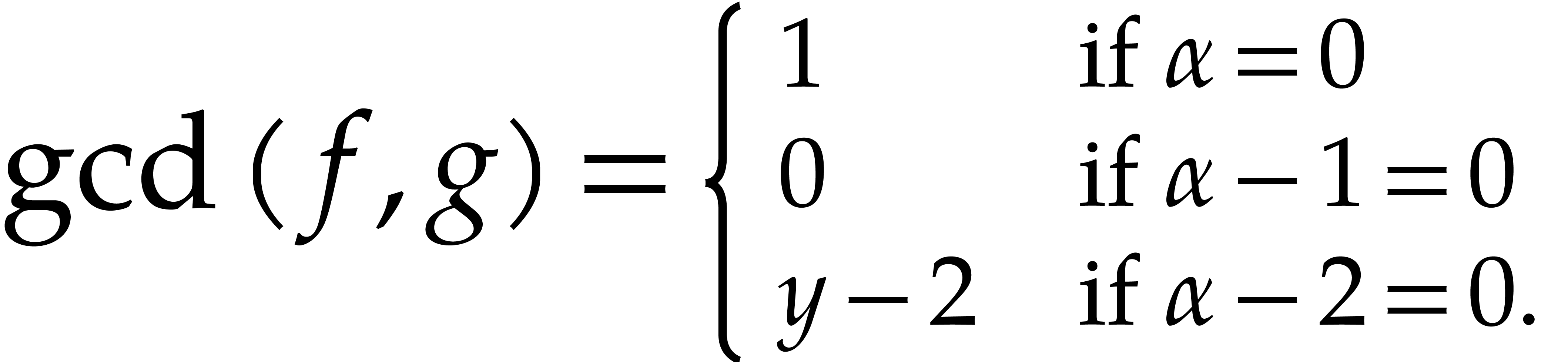
Example  be a parameter with for
be a parameter with for  , and consider the computation of
the gcd of
, and consider the computation of
the gcd of

Using dynamic evaluation, this gives rise to three branches, and the result
Dynamic evaluation is very attractive from a conceptual point of view,
but rather tricky to implement: splittings correspond to
non-deterministic control structures that are typically implemented
using continuations [41]. Dynamic evaluation is also
difficult to analyze from the complexity perspective. In particular, it
is hard to determine the amount of computation that can be shared
between several branches. At any rate, the worst case complexity of
dynamic evaluation is much higher than the number of steps of the
program multiplied by the cost of operations in .
The first aim of this paper is to design an alternative, so-called
directed evaluation strategy, with the same abstract
specification, but with a quasi-linear computational complexity in . The key idea is to run the entire
program, while systematically opting for the “principal”
branch in case of splittings. This principal branch is the one for which
the defining polynomial of is maximal. At every
splitting, we also store the defining polynomial for the other
“residual” branch. Once the computation for the principal
branch has been completed, we recursively apply the same algorithm for
each residual branch, on the reduced input data modulo the corresponding
defining polynomial. The required reductions are computed simultaneously
for all residual branches, using a fast divide-and-conquer algorithm for
multi-modular reduction.
using the dynamic evaluation
strategy. More generally, one may wish to compute with a finite number
of parameters  that are introduced successively
as follows:
that are introduced successively
as follows:  is subjected to the constraint
is subjected to the constraint
 for some monic polynomial
for some monic polynomial  , then
, then  is subjected
to
is subjected
to  with
with  monic in
monic in  , then
, then  is
subjected to
is
subjected to  with
with  monic in
monic in  , and so on. The
second aim of the present paper is the design of fast algorithms for
computing dynamically in
, and so on. The
second aim of the present paper is the design of fast algorithms for
computing dynamically in  as if it were a
field. The main difficulties arise when
as if it were a
field. The main difficulties arise when  is
allowed to be arbitrarily large.
is
allowed to be arbitrarily large.
The parameters naturally induce a tower
of effective algebraic extensions

where

The parameter  corresponds to the class of
corresponds to the class of  in
in  for
for  . A tower of this type is written
. A tower of this type is written  and we call its height. Throughout this
paper, we write
and we call its height. Throughout this
paper, we write  and
and  . The
. The  are called the
defining polynomials of the tower, and
its degree. Elements in are naturally
represented by univariate polynomials in over
are called the
defining polynomials of the tower, and
its degree. Elements in are naturally
represented by univariate polynomials in over
 of degree
of degree  .
.
In order to reduce computational costs, it will be convenient to assume
that the tower is explicitly separable in the sense that  and that we have explicit Bézout cofactors
and that we have explicit Bézout cofactors
 with
with  for . In particular, each
for . In particular, each  is reduced. This means that
is reduced. This means that  contains no non-zero
nilpotent elements or, equivalently, that is a
product of separable field extensions of .
contains no non-zero
nilpotent elements or, equivalently, that is a
product of separable field extensions of .
Towers of algebraic extensions are related to “triangular
sets”. In fact, we may see the preimage of
over as a multivariate polynomial  in
in  such that
has degree
such that
has degree  in ,
degrees
in ,
degrees  in
in  for
for  , and
, and  .
The sequence
.
The sequence  then forms a special regular case
of a triangular set. The separability of
translates into the requirement that
then forms a special regular case
of a triangular set. The separability of
translates into the requirement that  is
separable for all roots
is
separable for all roots  of
of  for .
for .
The second main aim of this paper is to generalize the directed
evaluation strategy from the univariate case, while ensuring that the
complexity remains bounded by the number of steps in our algorithm
multiplied by  (which corresponds roughly
speaking to the cost of arithmetic operations in the tower [29]).
Intuitively speaking, we use the univariate strategy in a recursive
fashion, but the analysis becomes far more technical due to the fact
that splittings can occur at any level of the tower. This difficulty
will be countered through the development of suitable data structures.
(which corresponds roughly
speaking to the cost of arithmetic operations in the tower [29]).
Intuitively speaking, we use the univariate strategy in a recursive
fashion, but the analysis becomes far more technical due to the fact
that splittings can occur at any level of the tower. This difficulty
will be countered through the development of suitable data structures.
 means that
means that  ;
see [21, chapter 25, section 7] for technical details.
The notation
;
see [21, chapter 25, section 7] for technical details.
The notation  means that there exist
means that there exist  such that
such that  for
for  sufficiently large. The least integer larger or equal to is written
sufficiently large. The least integer larger or equal to is written  ;
the largest one smaller or equal to is written
;
the largest one smaller or equal to is written
 .
.
Given an effective ring  , we
use
, we
use  as a notation for the cost of multiplying
two polynomials of degree ,
in terms of the number of operations in .
It is known [6] that
as a notation for the cost of multiplying
two polynomials of degree ,
in terms of the number of operations in .
It is known [6] that  .
We will also denote
.
We will also denote

In particular, given  for some monic polynomial
for some monic polynomial
 of degree ,
elements in
of degree ,
elements in  may be represented as classes of
polynomials in
may be represented as classes of
polynomials in  modulo , additions in require additions in ,
whereas multiplications in can be done using
modulo , additions in require additions in ,
whereas multiplications in can be done using
 ring operations in .
ring operations in .
We let  denote an exponent such that two
denote an exponent such that two  matrices over a commutative ring
can be multiplied with
matrices over a commutative ring
can be multiplied with  operations in . The constant
operations in . The constant  denotes another exponent such that a rectangular
denotes another exponent such that a rectangular  matrix over a commutative ring can be multiplied
with a square
matrix over a commutative ring can be multiplied
with a square  matrix with
matrix with  operations in . Le Gall has
shown in [34] that one may take
operations in . Le Gall has
shown in [34] that one may take  ; Huang and Pan have shown in [31] that
one may take
; Huang and Pan have shown in [31] that
one may take  . Throughout
this paper, in order to simplify complexity analyses, we assume that
. Throughout
this paper, in order to simplify complexity analyses, we assume that
 and
and  .
.
Recall that an element  is said to be
primitive if
is said to be
primitive if  . If
is a reduced -algebra,
then it is well known that a sufficiently generic -linear combination of
. If
is a reduced -algebra,
then it is well known that a sufficiently generic -linear combination of  is a
primitive element of
is a
primitive element of  . It may
thus seem odd, at first sight, to manipulate towers
of height
. It may
thus seem odd, at first sight, to manipulate towers
of height  whenever an isomorphic algebra
whenever an isomorphic algebra  exists. The problem is that both the computations of
primitive elements and conversions between representations are usually
expensive.
exists. The problem is that both the computations of
primitive elements and conversions between representations are usually
expensive.
Over a general field , no
efficient algorithm is currently known for finding a primitive element
together with its minimal polynomial  ,
and polynomials
,
and polynomials  such that
such that  for . It is known that this
problem can efficiently be reduced to a multivariate version of the
problem of modular composition using a randomized Las Vegas algorithm.
The corresponding conversions between tower and primitive element
representations can also be done using modular composition. All this is
a consequence of the transposition principle and Le Verrier's method; we
refer to [29, 30, 33, 38,
39] for more details. Unfortunately, no softly linear
algorithm is known for modular composition over a generic field,
although efficient algorithms have recently been designed for specific
cases [9, 27, 28]. If is a finite field, then Kedlaya–Umans and followers
have established almost optimal theoretical bit complexity bounds [30, 33, 38].
for . It is known that this
problem can efficiently be reduced to a multivariate version of the
problem of modular composition using a randomized Las Vegas algorithm.
The corresponding conversions between tower and primitive element
representations can also be done using modular composition. All this is
a consequence of the transposition principle and Le Verrier's method; we
refer to [29, 30, 33, 38,
39] for more details. Unfortunately, no softly linear
algorithm is known for modular composition over a generic field,
although efficient algorithms have recently been designed for specific
cases [9, 27, 28]. If is a finite field, then Kedlaya–Umans and followers
have established almost optimal theoretical bit complexity bounds [30, 33, 38].
Without primitive elements, using a naive induction on , the multiplication in
can be performed in time  for some constant
for some constant  . It is well known that, for a
sufficiently large constant
. It is well known that, for a
sufficiently large constant  ,
such products can actually be carried out in time
,
such products can actually be carried out in time  using Kronecker substitution; see for instance [21, chapter
8]. If many of the individual degrees are small,
then can become as large as
using Kronecker substitution; see for instance [21, chapter
8]. If many of the individual degrees are small,
then can become as large as  , which leads to an overall complexity bound of
the form
, which leads to an overall complexity bound of
the form  . Unfortunately,
this bound is far from linear if
. Unfortunately,
this bound is far from linear if  is much larger
than
is much larger
than  . Lebreton has shown
that one may take
. Lebreton has shown
that one may take  ; see [35] and [29, Proposition 2.4].
; see [35] and [29, Proposition 2.4].
Substantial improvements for the value of seem
difficult to achieve, and it might not even be possible to reach values
that are arbitrarily close to .
An alternative approach for efficient computations in a given tower is
to produce an equivalent, so-called accelerated tower of small
height, such that conversions between both towers are reasonably cheap.
This approach was first proposed in [29]: when the are all irreducible, we have shown how to multiply
elements in with  operations in , for any fixed
real
operations in , for any fixed
real  .
.
Dynamic evaluation has been developed by Della Dora, Dicrescenzo and Duval [10, 13–15] as a way to compute with algebraic parameters without irreducible factorizations. The approach is sometimes called the “D5 principle”, after the initials of the authors of [10]. One may regard dynamic evaluation as a computer algebra counterpart of the concept of non-deterministic evaluation from theoretical computer science. The strategy of dynamic evaluation has been extended to transcendental parameters [17, 22], real algebraic numbers in [16], and more general algebraic structures [25, chapter 8].
Several implementations have been proposed for parameters that are constrained by triangular sets. Early implementations simply handled splittings by redoing the entire computation under stricter constraints [13]. Unnecessary recomputations can be avoided through the use of high-level control structures such as continuations [4]. Unfortunately, efficient implementations of such control structures are rarely available for common programming languages. In this paper, we mostly leave implementation issues aside and focus on the complexity of computations with parameters.
In his PhD thesis, Dellière has investigated the relationship
between dynamic evaluation and decompositions of constructible sets into
triangular sets [11, 12]: the central
operation is the computation of gcds with coefficients in products of
fields, such as . Let us
further mention that dynamic evaluation has influenced several
polynomial system solvers relying on triangular sets [3],
and is now involved in various other algorithms in computer algebra; see
for instance [7, 26, 36].
Dedicated algorithms over dynamic fields such as
have been proposed by Dahan et al. [8]. Without
appealing to the general dynamic evaluation paradigm, they designed
efficient algorithms for quasi-inversion in , as well as gcd computations and coprime
factorization in  .
Recomputations induced by splittings are handled using fast ad
hoc techniques.
.
Recomputations induced by splittings are handled using fast ad
hoc techniques.
In the worst case, it is known that dynamic evaluation over suffers from an overhead of the order  : see Examples 4.4 and 4.6.
To our knowledge, this paper is first to propose a general strategy for
removing this overhead.
: see Examples 4.4 and 4.6.
To our knowledge, this paper is first to propose a general strategy for
removing this overhead.
The main contribution of the present paper is a new evaluation paradigm to compute with algebraic parameters in an asymptotically fast manner. In section 2, we recall the concept of computation trees as a formalization for the cost of algebraic algorithms. In section 3, we introduce the concepts of unpermissive, panoramic, and directed evaluation. This provides us with precise terminology for analyzing subtle differences between the complexities of various evaluation strategies.
Informally speaking, the unpermissive evaluation of a computation tree
simply aborts the usual evaluation whenever a zero-divisor needs to be
inverted or tested to zero. If a zero-divisor is discovered in this way,
then a proper factorization  of one of the
defining polynomials can be deduced. This leads to a decomposition of
into the direct sum of two proper subalgebras,
defined by the towers
of one of the
defining polynomials can be deduced. This leads to a decomposition of
into the direct sum of two proper subalgebras,
defined by the towers  and
and  .
.
A panoramic evaluation of a computation tree returns all possible
results when considering as algebraic
parameters, and thereby constitutes our main objective. The unpermissive
evaluation model gives rise to the following naive panoramic evaluation
strategy: whenever the unpermissive evaluation produces a proper
splitting of , we restart the
evaluation over each of the two subalgebras of . The problem with this rather naive approach is
that the evaluation may need to be restarted as many as  times, which turns out to be suboptimal from a complexity point of view:
see Example 4.4.
times, which turns out to be suboptimal from a complexity point of view:
see Example 4.4.
The directed evaluation is meant to remedy this situation by ensuring a
sharp decrease of every time that we need to
restart the evaluation. More precisely, we will show that the
reevaluation depth remains bounded by  .
.
Section 4.2 contains our main complexity result in the case
of a single parameter, i.e.  .
We prove a softly linear complexity bound for panoramic evaluation and
provide a detailed comparison with various implementations of dynamic
evaluation.
.
We prove a softly linear complexity bound for panoramic evaluation and
provide a detailed comparison with various implementations of dynamic
evaluation.
In section 5, we turn to the case of an arbitrary number of
parameters . With respect to
the univariate case, the main difference is that  is not necessarily a field, although we still conduct our computation as
if it were (e.g. during gcds computations in
is not necessarily a field, although we still conduct our computation as
if it were (e.g. during gcds computations in  ). Consequently, zero-tests and inversions of
elements in
). Consequently, zero-tests and inversions of
elements in  may lead to additional case
distinctions according to the possible values of
may lead to additional case
distinctions according to the possible values of  . Despite these technical complications, we again
prove a quasi-linear complexity bound for the cost of panoramic
evaluation, under the assumption that is fixed
(this means that is not allowed to grow with
).
. Despite these technical complications, we again
prove a quasi-linear complexity bound for the cost of panoramic
evaluation, under the assumption that is fixed
(this means that is not allowed to grow with
).
For arbitrary, not necessarily bounded heights , the complexity analysis becomes tedious. We need
to revisit the construction of accelerated towers of fields, introduced
in [29], in the context of directed evaluation. The key
idea is as follows: before the directed evaluation of a given
computation tree, we perform the directed computation of an accelerated
version of the current tower, so the computation tree can subsequently
benefit from accelerated arithmetic. Overall, in section 7,
we achieve an overhead of the form  for the
panoramic evaluation, where
for the
panoramic evaluation, where  represents any fixed
positive real number.
represents any fixed
positive real number.
Our techniques are more general than those of [8]: they
turn out to be applicable in all contexts that involve dynamic
evaluation with algebraic numbers. In addition, thanks to our
accelerated tower arithmetic, we improve the complexity bounds for the
specific tasks studied in [8], whenever
is allowed to be arbitrarily large.
Section 7.4 contains two important additional examples. We
first show that products in a separable tower can be done in time  , which extends [29].
We next present a less straightforward application of fast panoramic
evaluation to matrix multiplication with entries in .
, which extends [29].
We next present a less straightforward application of fast panoramic
evaluation to matrix multiplication with entries in .
This section gathers known definitions and results about elementary operations in computer algebra, to be used in this paper.
Let us recall the notion of a computation tree; we essentially follow
the presentation from [5, chapter 4, section 4]. In the
present paper, all computation trees manipulate data in -algebras over an effective field , and only the following operations are
allowed:
The binary arithmetic operations  in the
algebra.
in the
algebra.
The unary operation  of inversion, which is
partially defined in the algebra.
of inversion, which is
partially defined in the algebra.
The unary zero-test, written  .
.
For each constant  , the
nullary constant function
, the
nullary constant function  and the unary
function
and the unary
function  of scalar multiplication by
of scalar multiplication by  . We denote the corresponding
sets of constant functions and scalar multiplications by
. We denote the corresponding
sets of constant functions and scalar multiplications by  and
and  .
.
We write  for the set of all arithmetic
operations.
for the set of all arithmetic
operations.
 of the sets
of the sets  ,
,
 ,
,  , and
, and  of input
nodes, computation nodes, branching nodes and
output nodes. We assume that the input nodes form an initial
segment of unary nodes starting at the root, that the output nodes are
leafs (of arity zero), that computation nodes admit arity one, and
that branching nodes admit arity two. A computation tree over is such a binary tree,
together with an instruction function that
of input
nodes, computation nodes, branching nodes and
output nodes. We assume that the input nodes form an initial
segment of unary nodes starting at the root, that the output nodes are
leafs (of arity zero), that computation nodes admit arity one, and
that branching nodes admit arity two. A computation tree over is such a binary tree,
together with an instruction function that
assigns an instruction of the form

to every computation node  ,
where
,
where  has arity
has arity  , and
, and  are nodes in
are nodes in  that are predecessors of (i.e. nodes in the path ascending from
to the root of the tree);
that are predecessors of (i.e. nodes in the path ascending from
to the root of the tree);
assigns an instruction of form
to every branching node ,
where  is a predecessor of
in ;
is a predecessor of
in ;
assigns a return value  to every
output node , where are predecessors of in
, and
to every
output node , where are predecessors of in
, and  may depend on .
may depend on .
be a computation tree as above with  input nodes. Let be a -algebra and let us show how gives rise to an evaluation function
input nodes. Let be a -algebra and let us show how gives rise to an evaluation function

The value  is a new symbol that is returned
whenever an arithmetic operation cannot be executed. In the present
framework this can only happen for inversions.
is a new symbol that is returned
whenever an arithmetic operation cannot be executed. In the present
framework this can only happen for inversions.
Given an input value  , the
evaluation of at
proceeds by constructing a path
, the
evaluation of at
proceeds by constructing a path  from the root of
the tree, along with the function
from the root of
the tree, along with the function

that associates a value to each node of the path, as follows:
The path begins with the input nodes  of ,
and we set
of ,
and we set  for
for  .
The next node of the path is set to the successor of
.
The next node of the path is set to the successor of  .
.
If the current node of the path is a computation node of the form  then we set
then we set  . If this calculation is well
defined, then the next node of the path is set to the successor of
. Otherwise, the
evaluation path ends at ,
we say that the computation tree is undefined at , and we set
. If this calculation is well
defined, then the next node of the path is set to the successor of
. Otherwise, the
evaluation path ends at ,
we say that the computation tree is undefined at , and we set  .
.
If the current node of the path is a branching node
of the form  , then we set
, then we set
 . If
. If  is then the next node of the path is set to
the left successor of ,
otherwise the next node is the right successor of .
is then the next node of the path is set to
the left successor of ,
otherwise the next node is the right successor of .
If the current node of the path is an output node
with return value , then
we set  . The path ends at
and we set
. The path ends at
and we set  .
.
. Given a path of length  with leaf
with leaf  in ,
we define
in ,
we define  to be its cost. The maximal cost of
a path is called the operational cost of
and we denote it by
to be its cost. The maximal cost of
a path is called the operational cost of
and we denote it by  . We
may use as a bound for the number of
operations in that are required for the
evaluation of over .
. We
may use as a bound for the number of
operations in that are required for the
evaluation of over .
Since additions, multiplications and inversions typically admit different costs, it is convenient to introduce the following more detailed quantities:
 stands for the number of input nodes,
i.e.
stands for the number of input nodes,
i.e.  .
.
 stands for the maximal arity of a return
value, i.e.
stands for the maximal arity of a return
value, i.e.  .
.
 stands for the maximal number of operations
in
stands for the maximal number of operations
in  for a path in .
for a path in .
 stands for the maximal number of
multiplications for a path in .
stands for the maximal number of
multiplications for a path in .
 stands for the maximal number of inversions
or zero-tests for a path in .
stands for the maximal number of inversions
or zero-tests for a path in .
We will call  the detailed cost of and notice that
the detailed cost of and notice that  .
Taking
.
Taking  in Example 2.1, we have
in Example 2.1, we have
 ,
,  ,
,  ,
,  ,
,  .
.
Usually, we are really interested in the maximal number  of scalar operations in that are needed to
evaluate over .
If and are clear from
the context, this is simply called the cost of
or the time needed to evaluate .
It will be useful to introduce the following additional quantities:
of scalar operations in that are needed to
evaluate over .
If and are clear from
the context, this is simply called the cost of
or the time needed to evaluate .
It will be useful to introduce the following additional quantities:
 stands for the maximal number of elements in
that are needed to represent an element in
. Throughout this paper,
we assume that operations in can all be
computed using
stands for the maximal number of elements in
that are needed to represent an element in
. Throughout this paper,
we assume that operations in can all be
computed using  operations in .
operations in .
 stands for the number of operations in that are needed to multiply two elements in .
stands for the number of operations in that are needed to multiply two elements in .
 stands for the maximal number of operations
in that are needed to perform a zero-test or
inversion in .
stands for the maximal number of operations
in that are needed to perform a zero-test or
inversion in .
We clearly have

Remark
negations  are implemented as
are implemented as  ;
;
divisions  are implemented as
are implemented as  ;
;
equality tests  are implemented as
are implemented as  .
.
These restrictions are harmless, in the sense that they only affect the
constants hidden in the “ ”
of complexity estimates.
”
of complexity estimates.
Remark
Remark  . Roughly speaking, it is a natural
extension of the Turing machine model for which the tapes are allowed to
contain elements in . The BSS
model is more powerful than the computation tree model in the sense that
it allows for loops, subroutines, lookup tables, etc. Nevertheless, an
arbitrary program in the BSS model that admits a finite number of
execution flows may be emulated by a computation tree. This amounts to
“unrolling” all possible executions as in Example 2.1
above.
. Roughly speaking, it is a natural
extension of the Turing machine model for which the tapes are allowed to
contain elements in . The BSS
model is more powerful than the computation tree model in the sense that
it allows for loops, subroutines, lookup tables, etc. Nevertheless, an
arbitrary program in the BSS model that admits a finite number of
execution flows may be emulated by a computation tree. This amounts to
“unrolling” all possible executions as in Example 2.1
above.
Remark
A polynomial in  of degree
is represented by the vector of its coefficients
from degree
of degree
is represented by the vector of its coefficients
from degree  to
to  .
Polynomial additions (resp. subtractions) in take at most additions
(resp. subtractions) in .
Determining the degree of a polynomial in
requires at most zero-tests.
.
Polynomial additions (resp. subtractions) in take at most additions
(resp. subtractions) in .
Determining the degree of a polynomial in
requires at most zero-tests.
be an effective commutative ring with
unity. We denote by a cost function for
multiplying two polynomials  by a straight-line
program over . We make the
following assumptions:
by a straight-line
program over . We make the
following assumptions:
 is a nondecreasing function in —this assumption is customary;
is a nondecreasing function in —this assumption is customary;
 is sufficiently close to linear, in
the sense that
is sufficiently close to linear, in
the sense that
 |
(2.1) |
holds whenever  . This
assumption is less common, but it is only used within Propositions
2.6 and 7.7. Notice that
. This
assumption is less common, but it is only used within Propositions
2.6 and 7.7. Notice that  .
.
For general , it has been
shown in [6] that one may take

If has positive characteristic, then it was
shown in [23, 24] that one may even take

where  .
.
 be of degree
be of degree  and
let
and
let  be monic of degree
be monic of degree  . The quotient of the Euclidean division of
. The quotient of the Euclidean division of  by can be computed by a
straight-line program in time
by can be computed by a
straight-line program in time  .
Given this quotient
.
Given this quotient  , the
remainder
, the
remainder  can be computed using
can be computed using  additional operations. If necessary, the degree of
additional operations. If necessary, the degree of  can be determined using at most
can be determined using at most  further zero-tests.
further zero-tests.
 and
and  in
in  can be computed
in time
can be computed
in time  ; see [21,
chapter 11]. But we will need to be more precise in section 5.3
in order to analyze the complexity of “directed inversions in
towers”. Following the notation of [37], let
; see [21,
chapter 11]. But we will need to be more precise in section 5.3
in order to analyze the complexity of “directed inversions in
towers”. Following the notation of [37], let  and
and  be in
of respective degrees
be in
of respective degrees  and
and  , and consider the extended Euclidean
sequence defined as follows:
, and consider the extended Euclidean
sequence defined as follows:
 ,
,  ,
,  ,
,
 ;
;
 ,
,  ,
,  ,
where
,
where  is the quotient of
is the quotient of  by
by  .
.
Consequently we have  , that
is the remainder in the division of by
, that
is the remainder in the division of by  , and
, and  for
all
for
all  . The sequence ends after
. The sequence ends after
 division steps with
division steps with  for
for
 , and
, and  . The last non-zero polynomial
. The last non-zero polynomial  is
is  and the Bézout relation is
and the Bézout relation is  .
.
The fast extended Euclidean algorithm applied to  and
and  does not compute the complete Euclidean
sequence, but only the sequence of the quotients
does not compute the complete Euclidean
sequence, but only the sequence of the quotients  in a divide and conquer fashion. This is enough to permit the efficient
recovery of the Bézout relation .
For
in a divide and conquer fashion. This is enough to permit the efficient
recovery of the Bézout relation .
For  , let
, let  . We claim that the number of zero-tests in the
fast extended Euclidean algorithm is exactly
. We claim that the number of zero-tests in the
fast extended Euclidean algorithm is exactly  . This claim is a consequence of the two following
observations about the fast extended Euclidean algorithm (see for
instance [37, Algorithm 18]):
. This claim is a consequence of the two following
observations about the fast extended Euclidean algorithm (see for
instance [37, Algorithm 18]):
Computing the quotients  does not involve any
zero-tests or inversions. On the other hand the determination of
does not involve any
zero-tests or inversions. On the other hand the determination of
 requires testing the coefficients of
requires testing the coefficients of  from degree
from degree  to , which involves
to , which involves  zero-tests. This totalizes
zero-tests.
zero-tests. This totalizes
zero-tests.
The degrees of the cofactors  and
and  , but also of all the entries
of the “transition matrices” are explicitly determined
from the
, but also of all the entries
of the “transition matrices” are explicitly determined
from the  ; see [37,
Lemma 10]. So the computation of the transition matrices also does
not involve any zero-tests or inversions.
; see [37,
Lemma 10]. So the computation of the transition matrices also does
not involve any zero-tests or inversions.
In order to perform polynomial divisions, the inverses of the leading
coefficients of the are needed. This requires at
most  inversions.
inversions.
To summarize the discussion, the extended gcd of
and of degree  takes additions, subtractions and products in , plus zero-tests and
inversions. In addition, every inversion of an
element is preceded by an unsuccessful zero-test for that element.
takes additions, subtractions and products in , plus zero-tests and
inversions. In addition, every inversion of an
element is preceded by an unsuccessful zero-test for that element.
Elements of a tower are in fine
represented by vectors of coordinates in  .
So additions, subtractions, and products by scalars in
can be done by straight-line programs with linear costs. We recall the
following result, where
.
So additions, subtractions, and products by scalars in
can be done by straight-line programs with linear costs. We recall the
following result, where  represents the cost of
one product in .
represents the cost of
one product in .
 such that one product
in can be computed by a straight-line program
in time
such that one product
in can be computed by a straight-line program
in time

In addition, the product of two polynomials in  can be computed by a straight-line program in time
can be computed by a straight-line program in time

Proof. This result is essentially due to
Lebreton [35]; see also [29, Proposition
2.4].
In the introduction, we have informally discussed computations with parameters and various strategies for automating case distinctions. In this section, we formalize these ideas in the specific situation of algebraic parameters.
Let be an effective field and let  be an ideal of
be an ideal of  such that:
such that:
 is a -algebra
of finite dimension
is a -algebra
of finite dimension  ,
,
is absolutely radical, which means radical
over the algebraic closure of .
In the context of the present paper, it will be convenient to call a parametric algebra over
with parameters, and is
said to be its defining ideal, written  . The respective images of
. The respective images of  in are denoted by ;
they are regarded as parameters over , subject to the relations in . Geometrically speaking, the tuple
in are denoted by ;
they are regarded as parameters over , subject to the relations in . Geometrically speaking, the tuple  represents a generic point in the set
represents a generic point in the set  of the
zeros of in
of the
zeros of in  . This setting is more general than the one of
the introduction, but it is intended to be applied later to ideals generated by triangular sets.
. This setting is more general than the one of
the introduction, but it is intended to be applied later to ideals generated by triangular sets.
Let be a second parametric algebra over with parameters. As a
shorthand, we write  whenever
is a quotient algebra of .
This is the case if, and only if,
whenever
is a quotient algebra of .
This is the case if, and only if,  ,
or, equivalently, if
,
or, equivalently, if  . If
, then we write
. If
, then we write  for the canonical projection
for the canonical projection  ,
and notice that
,
and notice that  represents a generic point in
the set
represents a generic point in
the set  of the zeros of
of the zeros of  in . With a slight abuse of
notation, is extended in a coefficient-wise
manner to
in . With a slight abuse of
notation, is extended in a coefficient-wise
manner to  .
.
Two parametric algebras  and
and  are said to be disjoint if
are said to be disjoint if  .
In that case, we have
.
In that case, we have

More generally, given pairwise disjoint 
 , we have
, we have

We will call such a decomposition a splitting of .
Now consider the prime decomposition

of the defining ideal of , and define  for . Then we have
for . Then we have  and there exists a natural isomorphism
and there exists a natural isomorphism
 |
(3.1) |
It is convenient to call this relation the total splitting of
. The corresponding zero-set
is a disjoint union:

Given a zero-divisor  , we
have
, we
have

Indeed, we clearly have  .
Conversely, given
.
Conversely, given  with
with  , we have
, we have  ,
whence
,
whence  since is radical,
and
since is radical,
and  . Setting
. Setting

we obtain a natural isomorphism

Such a decomposition is called an atomic splitting of . We have

From an effective point of view, the computation of total splittings requires an algorithm for polynomial factorization, whereas atomic splittings can be computed using standard techniques from effective polynomial algebra, such as Gröbner bases, triangular sets, or geometric resolutions.
Let us now describe an abstract way to formalize computations in
parametric algebras modulo splittings. Consider a set  of parametric algebras over .
We say that is a parametric framework
if the following conditions are satisfied:
of parametric algebras over .
We say that is a parametric framework
if the following conditions are satisfied:
Each  is an effective -algebra.
is an effective -algebra.
Given  , we can test
whether is invertible and compute if so.
, we can test
whether is invertible and compute if so.
Given  with ,
we have an algorithm for the projection .
with ,
we have an algorithm for the projection .
Given  , we can
effectively compute
, we can
effectively compute  and
and  .
.
For any  with
with  ,
we have algorithms for both directions of this isomorphism.
,
we have algorithms for both directions of this isomorphism.
Using Gröbner basis techniques, the above conditions are in
particular verified if is the set of all
parametric algebras that are explicitly given by
a finite set of generators of .
Indeed, a Gröbner basis of induces a basis
of over along with the
multiplication matrices by ,
so the above operations boil down to linear algebra. This observation is
convenient from a conceptual point of view, but, of course, not very
efficient from the asymptotic complexity perspective. Sections 4,
5, and 7 are devoted to more specific
parametric frameworks that allow for asymptotically faster
implementations.
From now on, denotes a parametric algebra, and
we will use the notations from section 2.1 for computation
trees. The unpermissive evaluation of a computation tree with input nodes as above at
is defined as follows. Informally speaking, the
tree is evaluated in the usual way over
concerning ring operations, but the evaluation aborts whenever a
zero-divisor needs to be inverted or tested to zero.
More precisely, we write  for the
unpermissive path, and
for the
unpermissive path, and  for the
unpermissive evaluation function. We introduce a new output
value, written
for the
unpermissive evaluation function. We introduce a new output
value, written  , in order to
indicate that the evaluation process detects that the current algebra
is not a field. We define
, in order to
indicate that the evaluation process detects that the current algebra
is not a field. We define  by induction:
by induction:
If the current node of the path is a
computation node of the form  ,
then we distinguish the following cases:
,
then we distinguish the following cases:
If  is zero in , then the path ends at
with
is zero in , then the path ends at
with  .
.
If is invertible, then  and the next node of the path becomes the successor of .
and the next node of the path becomes the successor of .
Otherwise, is a zero-divisor in , and the evaluation
aborts; the path ends at ,
we set  , and record
the zero-divisor for future use.
, and record
the zero-divisor for future use.
If the current node in the path is a
branching node , then we
distinguish the following cases:
If is zero in , then  ,
and the next node of the path becomes the right successor of
.
,
and the next node of the path becomes the right successor of
.
If is invertible in , then we set  , and the next node of the path becomes the
left successor of .
, and the next node of the path becomes the
left successor of .
Otherwise, is a zero-divisor in , and the evaluation
aborts; the path ends at ,
we set , and record
the zero-divisor for future use.
For the other types of nodes, the evaluation rules remain the same as for the standard evaluation described in section 2.1.
 .
If
.
If  , then the evaluation
paths and
, then the evaluation
paths and  coincide and
coincide and
 holds, under the natural convention that
holds, under the natural convention that  .
.
Proof. The proof is straightforward from the
definitions.
for a computation
tree  , we say that
, we say that

is a panoramic splitting of  for the pair
for the pair  if
if  for
for
 . A panoramic
value of at
. A panoramic
value of at  is a set of pairs
is a set of pairs  such that
such that  is a panoramic splitting of and
is a panoramic splitting of and  for
for  .
.
 denote the total splitting of , and let be a
panoramic value of at . Then, for each
denote the total splitting of , and let be a
panoramic value of at . Then, for each  ,
we have
,
we have

where  is the unique integer such that
is the unique integer such that  .
.
Proof. Since  is a field,
any non-zero element in is invertible.
Consequently,
is a field,
any non-zero element in is invertible.
Consequently,

and Lemma 3.1 implies that  .
On the other hand,
.
On the other hand,

and Lemma 3.1 implies that

Example from Example 2.1
for some  , and let
, and let

 , and
, and  , with
, with  .
If represents the image of
.
If represents the image of  in , then a possible
panoramic splitting of at
is
in , then a possible
panoramic splitting of at
is

where
 ,
,
 and
and  ,
for
,
for  ,
,
 and
and  .
.
Notice that the associated primes of  are
are  for
for  , and
the total splitting of is
, and
the total splitting of is
The following naive algorithm for the computation of panoramic values was already sketched in the introduction:
Algorithm
Compute the unpermissive evaluation  .
.
If  , then return
, then return
 .
.
Otherwise a non-trivial zero-divisor has
been recorded, which allows us to compute proper subalgebras
 and
and  such that
such that
 and
and  .
.
Recursively apply the algorithm to  for
for
 and return the union the panoramic
values obtained in this way.
and return the union the panoramic
values obtained in this way.
Proof. The algorithm finishes since is finite dimensional. As for the correctness it suffices
to verify that the output in step 2 is correct, which is straightforward
from the definitions.
From now we focus on the development of a faster alternative for
Algorithm 3.1. The idea is to impose a finer control over
the dimension of the components of splittings. Informally speaking,
computation trees over will be evaluated
entirely, while restricting operations to suitable subalgebras of : when a zero test or an inversion
occurs for a value , the
current subalgebra is further restricted to its largest subalgebra where
the projection of is either invertible or zero.
In order to formalize this idea, we need some definitions and the underlying directed arithmetic operations.
,
we say that a splitting

is directed if
 and
and  for
for  ,
,
 for .
for .
A directed evaluation of
takes as input:
a directed splitting of  ,
,
a point  ,
,
and returns
a refined directed splitting of  ,
,
 such that
such that  .
.
We introduce a directed variant of the inversion in , that takes a directed splitting
 as input, the value in
as input, the value in
 to be inverted, and that returns a directed
splitting
to be inverted, and that returns a directed
splitting  such that
such that
 is either zero or invertible;
is either zero or invertible;
The result of the directed inversion of is
respectively or  .
.
We also introduce a directed variant of the zero-test in , that takes a directed splitting
and the value in to be tested as input, and that returns a directed
splitting such that
is either zero or invertible;
If is invertible, then
has been computed and recorded;
The result is  .
.
Remark do not imply uniqueness of the output
splittings.
Remark for these operations, so
splittings never occur.
Let us now define the directed evaluation of a tree . As input, we take a directed splitting and .
Informally speaking, this evaluation simply applies the above directed
operations in sequence, so we evaluate the entire computation tree while
restricting the current algebra when encountering zero-tests and
inversions. The list of the residual subalgebras is maintained
throughout the evaluation process. For consistency, the evaluation takes
a directed splitting as input, but only the
summand will be decomposed during the evaluation
process.
Formally speaking, the directed evaluation path is written  . To each node
. To each node  ,
we both associate a directed splitting
,
we both associate a directed splitting

of , so

and a value

The directed evaluation of is defined
inductively as follows:
The path starts with the input nodes of .
We set  and
and  ,
for
,
for  . The next node of
the path is set to the successor of .
. The next node of
the path is set to the successor of .
If the current node of the path is the root
of the path, and is a computation node ,
then we necessarily have  and
and  , we set
, we set  and
and  . The next node of the path is
set to the successor of .
. The next node of the path is
set to the successor of .
If the current node of the path is a
computation node with  , whose direct predecessor is
, whose direct predecessor is  , then we set
, then we set  and
and

The next node of the path is set to the successor of .
If the current node of the path is a
computation node , whose
direct predecessor is ,
then we apply the directed inversion to  for
the splitting
for
the splitting  . This
yields a new splitting
. This
yields a new splitting  that we assign to
that we assign to
 .
.
If  , then we set
, then we set
 , and the path ends
at .
, and the path ends
at .
Otherwise  , and the
next node of the path becomes the successor of .
, and the
next node of the path becomes the successor of .
If the current node of the path is a
branching node , whose
direct predecessor is ,
then we apply the directed zero-test to for
the splitting . This
yields a new splitting ,
that we assign to .
If , then  , and the current node of
the path becomes the right successor of .
, and the current node of
the path becomes the right successor of .
Otherwise,  , and the
current node of the path becomes the left successor of . We also record the
inverse
, and the
current node of the path becomes the left successor of . We also record the
inverse  .
.
If the current node of the path is an output
node , whose predecessor
is , then we set  and
and
Whenever  are such that
is a successor of , the
splittings of at and
satisfy
are such that
is a successor of , the
splittings of at and
satisfy  .
It can be checked by induction over the path
that
.
It can be checked by induction over the path
that  and
and  are well
defined.
are well
defined.
represent the
directed splitting returned by the directed
evaluation of at as
above. Then, for all  , we
have
, we
have

Proof. We verify by induction on paths that and  coincide, and that
coincide, and that  holds for all that is not a
branching node.
holds for all that is not a
branching node.
Example from
Example 2.1, and let
, and , with .
Consider the directed evaluation of at  , where
represents the image of in . The first zero-test that we encounter is
, where
represents the image of in . The first zero-test that we encounter is
 , which yields the directed
splitting
, which yields the directed
splitting

After the  zero-tests
zero-tests  , we end up with the directed decomposition
, we end up with the directed decomposition
and the value  . This is due
to the requirement that directed evaluation always privileges the
“branch of highest degree”. If
. This is due
to the requirement that directed evaluation always privileges the
“branch of highest degree”. If  ,
then the last zero-test potentially leads to another directed
decomposition
,
then the last zero-test potentially leads to another directed
decomposition
and the value  . In general,
we recall that directed evaluation is a non-deterministic process: the
output may depend on internal splitting choices that are made during the
directed zero-tests and inversions.
. In general,
we recall that directed evaluation is a non-deterministic process: the
output may depend on internal splitting choices that are made during the
directed zero-tests and inversions.
We are now in a position to state a central algorithm of this paper, which performs panoramic evaluations using directed ones. The presentation is abstract, in terms of general parametric frameworks. In the remainder of the paper we will study various concrete instantiations of this algorithm.
Algorithm
Perform the directed evaluation of at
for the trivial directed splitting  of .
Let be the directed splitting obtained
in return.
of .
Let be the directed splitting obtained
in return.
Compute the projections  for .
for .
Recursively call the algorithm in order to evaluate at for .
Return the union of  and of the panoramic
values obtained in step 3.
and of the panoramic
values obtained in step 3.
Proof. Algorithm 3.2 finishes because the dimension of the input algebra strictly decreases throughout the recursive calls in step 3. At the end of step 1, we have
by Proposition 3.9. Therefore the singleton  is a panoramic value of at
is a panoramic value of at  . We conclude by observing that the
union of the panoramic values in step 4 gives a panoramic value of at .
. We conclude by observing that the
union of the panoramic values in step 4 gives a panoramic value of at .
Example  , and
, and  for
for  . After the recursive calls
in step 3, we obtain the panoramic value
. After the recursive calls
in step 3, we obtain the panoramic value

In the next sections, Algorithm 3.2 will lead to nearly linear asymptotic complexity bounds. So it turns out to be much faster than the naive Algorithm 3.1.
From the complexity point of view, there is still a problem
with naive implementations of Algorithm 3.2: the directed
evaluation approach involves many potentially expensive conversions of
the form  . A general solution
to this issue is tedious, but for the concrete parametric frameworks
from this paper, a natural and efficient approach is to delay these
conversions. This can be done at the price of performing arithmetic
operations in the input algebra instead of its subalgebras.
. A general solution
to this issue is tedious, but for the concrete parametric frameworks
from this paper, a natural and efficient approach is to delay these
conversions. This can be done at the price of performing arithmetic
operations in the input algebra instead of its subalgebras.
Consider for instance the simplest case when  , where is monic of degree
. Let
, where is monic of degree
. Let  with
with  and
and  .
Then one projection
.
Then one projection  corresponds to a division by
of cost
corresponds to a division by
of cost  ,
when using the standard representation for elements in . This means that additions during the directed
evaluation of a tree typically admit a cost
instead of
,
when using the standard representation for elements in . This means that additions during the directed
evaluation of a tree typically admit a cost
instead of  , which is
suboptimal.
, which is
suboptimal.
A natural remedy to this problem is to delay reductions modulo . This strategy naturally fits in
our setting of parametric frameworks through the use of redundant
representations. More precisely, consider some
within a parametric framework .
Then we may define a new parametric framework  whose objects are algebras in , with this modification that elements in are represented by elements in . Given
whose objects are algebras in , with this modification that elements in are represented by elements in . Given  ,
this means that projections
,
this means that projections  are free of charge
in . The arithmetic
operations on elements in
are also performed in . The
inversion of
are free of charge
in . The arithmetic
operations on elements in
are also performed in . The
inversion of  is done by computing the projection
is done by computing the projection
 in and then performing
the inversion of
in and then performing
the inversion of  in ; zero-tests are done similarly.
in ; zero-tests are done similarly.
Of course, at the end of a directed evaluation that uses this kind of
redundant representations, we may wish to convert the result to the
standard representation in .
This can be done by inserting a “finalization” step at the
end of step 1 in Algorithm 3.2.
This section is devoted to parametric algebras with one
algebraic parameter, that is of the form  with
with
 monic, separable, and of degree . For our complexity bounds it will be
convenient to assume that
monic, separable, and of degree . For our complexity bounds it will be
convenient to assume that  .
.
Elements in are represented as remainder classes
 with
with  .
The univariate situation is notably simple but already useful enough to
be treated separately. We first specify the parametric framework and the
directed operations, then we analyze the cost of our fast panoramic
evaluation, and finally we compare the directed evaluation strategy with
dynamic evaluation.
.
The univariate situation is notably simple but already useful enough to
be treated separately. We first specify the parametric framework and the
directed operations, then we analyze the cost of our fast panoramic
evaluation, and finally we compare the directed evaluation strategy with
dynamic evaluation.
For efficiency reasons, we further assume that
is explicitly separable in the sense that we are given the
cofactors  and
and  in
in  in the Bézout relation
in the Bézout relation
 |
(4.1) |
Computing this relation from the outset only requires
operations in .
Let us first specify the required operations of the univariate parametric framework, and explicit their complexity.
Additions and subtractions in can clearly be
performed by straight-line programs in linear time , whereas multiplications take time .
An element  with is
invertible if and only if
with is
invertible if and only if  and, in that case,
can be computed using the extended Euclidean
algorithm. Both the test and the computation of
can be done by a computation tree in time .
and, in that case,
can be computed using the extended Euclidean
algorithm. Both the test and the computation of
can be done by a computation tree in time .
We have if and only if  . In that case, we have
. In that case, we have

for all ; the projection
can thus be computed in time by a straight-line program (below, we will rather use
the technique of delayed reductions from section 3.7 in
order to avoid projections altogether).
Given  with
with  ,
we have
,
we have  and
and  .
This shows that we can compute
.
This shows that we can compute  and
and  in time using computation
trees.
in time using computation
trees.
Given univariate parametric algebras  ,
we have if, and only if,
,
we have if, and only if,  (which in particular implies that the
(which in particular implies that the  are
pairwise coprime). In this case, the isomorphism
in both directions can be computed in time
are
pairwise coprime). In this case, the isomorphism
in both directions can be computed in time  by using the usual subproduct tree of
by using the usual subproduct tree of  ;
see [21, chapter 10].
;
see [21, chapter 10].
The directed zero-tests and inversions of an element  with preimage can be computed in time , as follows:
with preimage can be computed in time , as follows:
The input is a directed splitting of ,

the Bézout relation  ,
and an element
,
and an element  with preimage
with preimage  .
.
If  , then the result of
the zero-test is and the result of the
inversion is . The input
directed splitting is left unchanged in return.
, then the result of
the zero-test is and the result of the
inversion is . The input
directed splitting is left unchanged in return.
We compute  along with the Bézout
relation
along with the Bézout
relation  .
.
If  , then the result of
the zero-test is and the result of the
inversion is
, then the result of
the zero-test is and the result of the
inversion is  . The input
directed splitting is left unchanged in return.
. The input
directed splitting is left unchanged in return.
We compute  , and deduce
the Bézout relations of
, and deduce
the Bézout relations of  and , and of
and , and of  and
and  by Lemma 4.1 below.
by Lemma 4.1 below.
If  then we return the directed splitting
then we return the directed splitting

and the image of is zero in  . The value of the zero-test is , and the result of the
inversion is .
. The value of the zero-test is , and the result of the
inversion is .
Otherwise, we return the splitting

and the image of in  is invertible. The latter splitting is actually directed since
is invertible. The latter splitting is actually directed since  implies
implies

The inverse of modulo
is obtained as follows:
From the Bézout relation ,
we deduce  and then
and then

From the Bézout relation ,
we get  , and deduce
, and deduce

The value of the zero-test is ,
and the result of the inversion is  .
.
 be monic and separable of degree
be monic and separable of degree
 , and let
, and let  and
and  be non-constant monic polynomials in such that
be non-constant monic polynomials in such that  .
Given the Bézout relation
.
Given the Bézout relation  ,
the Bézout relations for and , and and
can be computed by a straight-line program in
time .
,
the Bézout relations for and , and and
can be computed by a straight-line program in
time .
Proof. From the given Bézout relation we have

Since  and
and  are strictly
less than
are strictly
less than  , reduction of this
relation modulo
, reduction of this
relation modulo  yields
yields

This is the desired Bézout relation for
and . By symmetry, the
Bézout relation for and
can be computed in a similar way.
We are now ready to present the main complexity bound of this section, in terms of the detailed cost functions defined in section 2.1.
be an explicitly separable
extension of of degree  , and let be a computation
tree over -algebras of
detailed cost
, and let be a computation
tree over -algebras of
detailed cost  . Then the
panoramic evaluation of over
by Algorithm 3.2 takes time
. Then the
panoramic evaluation of over
by Algorithm 3.2 takes time
Proof. We use Algorithm 3.2 in
combination with the technique of delayed reductions from section 3.7. This means that we avoid the cost of conversions, at the
price of performing arithmetic operations in subalgebras of in the algebra itself. More
precisely, the cost of one directed evaluation of
over is the sum of:
 operations in for
the nodes of type in ,
operations in for
the nodes of type in ,
 operations in for
the nodes of type
operations in for
the nodes of type  ,
,
 operations in for
the directed zero-tests and inversions,
operations in for
the directed zero-tests and inversions,
 operations in for
the reductions in the output nodes of the path (i.e.
the “finalization step” in the terminology of section 3.7).
operations in for
the reductions in the output nodes of the path (i.e.
the “finalization step” in the terminology of section 3.7).
Let denote the directed splitting obtained at
the end of step 1 of Algorithm 3.2. By construction we have
 |
(4.2) |
Fast multi-remaindering yields for in time  .
.
We recursively perform the panoramic evaluation of
over  for all .
Let
for all .
Let  be the cost of one panoramic evaluation of
over an algebra of dimension . We have shown that there exists a universal
constant
be the cost of one panoramic evaluation of
over an algebra of dimension . We have shown that there exists a universal
constant  such that
such that
In view of  times.
times.
Example performs  operations in
. One directed evaluation of
over
operations in
. One directed evaluation of
over  takes time
takes time  , for .
In this example, the resulting cost of Algorithm 3.2 is
, for .
In this example, the resulting cost of Algorithm 3.2 is

which is better than the bound of Theorem 4.2 because the
recursive depth is constant. If is a field, then
we notice that the usual evaluation of at takes time  .
.
Let us now compare the complexity of directed evaluation with the
complexities of other known strategies for a single algebraic parameter.
One problem with dynamic evaluation is that it is hard to implement in
common programming languages without support for parallelism or high
level control structures such as continuations [41]. Early
implementations of dynamic evaluation were therefore naive [13],
the computation tree essentially being reevaluated for every separate
case: see subsection 4.3.1. In theory, using
When using common sequential programming languages, dynamic evaluation is usually implemented as in Algorithm 3.2, with the following two differences:
Splittings are no longer required to be directed. In other words, at
each evaluation step, the splitting at node
of is not required
to satisfy the conditions  for
for  . Consequently, whenever a zero-test or an
inversion triggers a basic splitting for
. Consequently, whenever a zero-test or an
inversion triggers a basic splitting for  , the branch where we continue the evaluation is
chosen non-deterministically. Such evaluations are said to be
undirected in the sequel.
, the branch where we continue the evaluation is
chosen non-deterministically. Such evaluations are said to be
undirected in the sequel.
Once the undirected evaluation is finished, the projections in step 2 of Algorithm 3.2 are done naively, without fast multi-remaindering.
Adapting the cost analysis of Algorithm 3.2 leads to the complexity bound
for naive dynamic evaluation, in terms of the detailed cost functions from section 2.1.
The following example shows that the latter bound is tight in the worst case. So naive dynamic evaluation is in general less efficient than fast panoramic evaluation.
Example
with , , , and
let represent the image of
in . Then a possible
undirected evaluation of at  performs a basic splitting and may select the splitting
performs a basic splitting and may select the splitting

So a possible undirected evaluation ends with the latter splitting and
output value  .
.
A possible undirected evaluation of over  may end with the splitting
may end with the splitting

and value  . Doing so for the
rest of the evaluation, we may end with the splitting
. Doing so for the
rest of the evaluation, we may end with the splitting

and the value of over is
 for ,
and is
for ,
and is  over
over  .
.
The total execution time therefore grows at least with
In comparison to Example 4.3, it turns out that dynamic evaluation may be significantly more expensive than our fast panoramic evaluation based on directed evaluation.
The naive implementation of dynamic evaluation using reevaluations of
the entire computation tree leads to unnecessary recomputations.
High-level control structures such as continuations can be used to avoid
this kind of recomputations, by resuming the
“recomputations” directly at the points where the splittings
occurred.
Example be a computation tree of the family introduced in Example
2.1, and let us again consider
with , , ,
and let represent the image of
in . The dynamic evaluation
of at encounters an
inconsistency when testing whether  is zero
modulo
is zero
modulo  . One computation
continues modulo
. One computation
continues modulo  , and so
returns . Another computation
continues modulo
, and so
returns . Another computation
continues modulo  and a new splitting occurs at
the zero-test of
and a new splitting occurs at
the zero-test of  , etc.
Counting common computations in branches only once, the total cost of
the dynamic evaluation is bounded by
, etc.
Counting common computations in branches only once, the total cost of
the dynamic evaluation is bounded by
which is essentially the same as the cost of our fast panoramic evaluation: see Example 4.3.
Example  -algebras:
-algebras:
for from to
do
for from to do
if  then
then 
Evaluated over a field of degree over , the
total cost of this program is

Let us now take with as
in the previous example. The dynamic evaluation executes the first loop
sequentially with cost  . Then
it splits at the zero-test of
. Then
it splits at the zero-test of  modulo into two branches:
modulo into two branches:
The first branch works modulo and reduces
 modulo ,
which amounts to
modulo ,
which amounts to  operations in . The costs of the zero-tests totalize
operations in . The costs of the zero-tests totalize
 .
.
The second branch works modulo .
The zero-test of  costs
costs  , and causes the present branch to split up
into two:
, and causes the present branch to split up
into two:
The first branch works modulo  and
reduces
and
reduces  , which
amounts to
, which
amounts to  operations in . The costs of the zero-tests totalize
operations in . The costs of the zero-tests totalize
 .
.
The second branch works modulo  .
The zero-test of
.
The zero-test of  costs
costs  , and causes the present branch to
split up into two:
, and causes the present branch to
split up into two:
...
The total execution time when using dynamic evaluation is therefore
By Theorem 4.2, the execution time using fast panoramic
evaluation is  , which is
significantly better.
, which is
significantly better.
The bottleneck of dynamic evaluation in Example 4.6 lies in the projections of data from parametric algebras into smaller ones. It is important to stress that this cost cannot be reduced by executing the branches in a judicious order or by cleverly factoring out common computations in branches using continuations. In our fast panoramic evaluation strategy, this means that fast multi-remaindering plays a crucial role for handling these projections efficiently.
The above examples show that determining the best strategy to compute a panoramic value for a given computation tree is not an obvious problem: in fact, computation trees and more general programs may often be modified in order to accelerate panoramic evaluations. Let us now consider some specific computation trees for which efficient ad hoc strategies have been developed.
For panoramic quasi-inversions in ,
gcds, and coprime factorizations in  ,
Dahan et al. have designed fast algorithms in [8].
For instance, they showed that a panoramic gcd in
,
Dahan et al. have designed fast algorithms in [8].
For instance, they showed that a panoramic gcd in  could be obtained with cost
could be obtained with cost
 |
(4.3) |
see [8, Propositions 2.4 and 4.1]. For this problem, Theorem 4.2 leads to the cost

which can be further improved to
 |
(4.4) |
by using Kronecker substitution to multiply polynomials in  in time
in time  . If
. If
 , then this cost is slightly
higher than
, then this cost is slightly
higher than  , then (4.4) simplifies to
, then (4.4) simplifies to  , which is slightly better than
, which is slightly better than
Another interesting application of fast panoramic evaluation is the
computation of the determinant  of an matrix
of an matrix  with entries in . By means of Berkowitz' algorithm
[1], such a determinant can be computed in time
with entries in . By means of Berkowitz' algorithm
[1], such a determinant can be computed in time  by a straight-line program over , and therefore in time
by a straight-line program over , and therefore in time  by a
straight-line program over .
This cost decreases to
by a
straight-line program over .
This cost decreases to  by using [32],
and even to
by using [32],
and even to  thanks to [40],
whenever inverses of
thanks to [40],
whenever inverses of  are given in . We can do better with fast panoramic
evaluation: we first compute the determinant of
over as if it were a field by means of a
computation tree that performs ring operations
and
are given in . We can do better with fast panoramic
evaluation: we first compute the determinant of
over as if it were a field by means of a
computation tree that performs ring operations
and  zero-tests and inversions. By Theorem 4.2, this can be done in time
zero-tests and inversions. By Theorem 4.2, this can be done in time

The resulting panoramic value corresponds to the residues of modulo several pairwise coprime factors of . Chinese remaindering finally allows to
recover the actual determinant using additional operations in .
From now on, we focus on the complexity of panoramic evaluation for algebraic parameters. Such a tower is determined by
algebraic parameters , where
is constrained by an algebraic equation over
, and
is constrained by an algebraic equation over  for
for
 . It is natural to apply the
method of the previous sections for a single algebraic parameter in a
recursive manner. But we have to face a new difficulty: directed
zero-tests and inversions in will involve
occasional zero-tests and inversions in
. It is natural to apply the
method of the previous sections for a single algebraic parameter in a
recursive manner. But we have to face a new difficulty: directed
zero-tests and inversions in will involve
occasional zero-tests and inversions in  ,
that will themselves involve occasional zero-tests and inversions in
,
that will themselves involve occasional zero-tests and inversions in
 , etc. The first goal of this
section is to design data structures that allow us to create new
branches for free during directed evaluation. At the end of a directed
evaluation we need to project input data into all the residual branches.
Performing this task efficiently is the second goal of this section.
, etc. The first goal of this
section is to design data structures that allow us to create new
branches for free during directed evaluation. At the end of a directed
evaluation we need to project input data into all the residual branches.
Performing this task efficiently is the second goal of this section.
Data structures play an important role in the efficiency of operations
required by parametric frameworks. From now on, we will only manipulate
parametric algebras whose defining ideals are generated by triangular
sets. In other words, all parametric algebras will be represented by
towers over  ,
as in section 1.1. We recall that
is also assumed to be absolutely reduced, i.e. is a product of fields. A tower is
said to be explicitly separable if we are given the
Bézout cofactors
,
as in section 1.1. We recall that
is also assumed to be absolutely reduced, i.e. is a product of fields. A tower is
said to be explicitly separable if we are given the
Bézout cofactors  and
and  in
in  such that
such that  for .
for .
In order to simplify complexity analyses, it is convenient to assume
that  for .
In particular,
for .
In particular,  . This
restriction is harmless, since extensions of degree
. This
restriction is harmless, since extensions of degree  can be discarded without cost in our model of computation trees.
can be discarded without cost in our model of computation trees.
Consider two towers and  of the same height and over the same base field
. Let
of the same height and over the same base field
. Let  and
and  denote the respective defining polynomials
of and .
We say that is a factor tower of if
denote the respective defining polynomials
of and .
We say that is a factor tower of if  . This
is the case if, and only if, there exist natural projections
. This
is the case if, and only if, there exist natural projections  (that naturally extend to projections
(that naturally extend to projections  in a coefficient-wise manner) such that:
in a coefficient-wise manner) such that:
 divides
divides  for .
for .
sends an element  represented by
represented by  to
to
for .
Given such a factor tower of  , let us now study the cost
, let us now study the cost  of computing one projection
of computing one projection  of an element
of an element  with
with  .
.
 be a factor tower of . The projection
be a factor tower of . The projection  of
an element
of
an element  can be computed by a straight-line
program in time
can be computed by a straight-line
program in time

Proof. Let  denote the
preimage of . We recursively
apply
denote the
preimage of . We recursively
apply  to the coefficients of
to the coefficients of  . Then, the reduction of
. Then, the reduction of  modulo
modulo  can be done by a straight-line program
with cost
can be done by a straight-line program
with cost  . Consequently,
there exists a universal constant such that the
cost function
. Consequently,
there exists a universal constant such that the
cost function  satisfies
satisfies

Unrolling this inequality yields

Taking  from Proposition 2.6
concludes the proof.
from Proposition 2.6
concludes the proof.
In the sequel, “()” stands for the empty tuple. Let  be an index set of
be an index set of  -tuples
of integers with
-tuples
of integers with  and
and
for integers  and
and  .
Consider a family
.
Consider a family  of factor towers of with the property that
of factor towers of with the property that  only
depends on
only
depends on  for all
for all  ,
and write
,
and write  . We say that such
a family of factors forms a tree factorization of if the variety
. We say that such
a family of factors forms a tree factorization of if the variety  is partitioned into
is partitioned into
 . If
. If  and
and  , then we also write
, then we also write  for the defining polynomial of
for the defining polynomial of  over
over  .
.
It is convenient to represent such a factorization by a labeled tree (see Figure 5.1): the nodes are identified with the index set made of the disjoint union

and each node
is labeled with the algebraic extension
.
The parent of the node
with
is simply the node
 .
Each individual factor tower
.
Each individual factor tower
 corresponds to a path from the root to a leaf.
corresponds to a path from the root to a leaf.
Given  and ,
let
and ,
let
Projecting the equality
on the first coordinates, we observe that the
projection of  , for given
, is the same for all
, for given
, is the same for all  , and equals
, and equals  , whence
, whence  .
Consequently,
.
Consequently,  forms a tree factorization of the
sub-tower
forms a tree factorization of the
sub-tower  . From an algebraic
point of view, this means that we have a natural isomorphism
. From an algebraic
point of view, this means that we have a natural isomorphism

Consider an explicitly separable tower and
assume that we wish to compute the panoramic evaluation of a computation
tree over .
In order to apply Algorithm 3.2 in this multivariate
context, it would be natural to specify a parametric framework, as we
did in the univariate case. Since we will exclusively focus on the
directed approach from now on, it turns out to be simpler and more
straightforward to describe how to perform the directed evaluation and
the projections in steps 1 and 2.
Informally speaking, we want to work with respect to a “factor of
highest possible degree” at each level. This leads to special
types of factorizations of that are illustrated
in Figure 5.2. The actual computations are done in the
algebras from the highlighted “principal branch”. The other
“residual branches” are dealt with at a next iteration, when
the computations for the principal branch have been completed.
Technically speaking, a directed splitting of
will be represented by:
Vectors  of polynomials in
for , such that:
of polynomials in
for , such that:
 are the defining polynomials of a factor
tower of , written
are the defining polynomials of a factor
tower of , written
 , and called the
principal branch.
, and called the
principal branch.
 for .
for .
 for
for  .
.
The Bézout relations  for , so is explicitly
separable.
for , so is explicitly
separable.
Each factor  with
with  and
and
 gives rise to a factor tower
gives rise to a factor tower  of , called a residual
branch, as follows:
of , called a residual
branch, as follows:
For  , we set
, we set  .
.
 .
.
For  , the defining
polynomial of
, the defining
polynomial of  over
over  is the projection of
is the projection of  in
in  .
.
The tree representation of the resulting tower factorization is summarized in Figure 5.2
represented in this manner is
Notice that a directed splitting  of naturally induces a directed splitting
of naturally induces a directed splitting  of
of  for .
for .
Now the main idea is to perform the directed evaluation of a computation tree over the principal branch, while postponing evaluations over residual branches. With our representation of directed splittings, creating residual branches is essentially free of charge; the corresponding tower representations will only be computed after completion of the entire directed evaluation, using a dedicated “finalization” procedure that will be detailed in subsection 5.4 below. After the finalization, the projections from step 2 of Algorithm 3.2 can be carried out efficiently using fast multi-remaindering; this will also be detailed in subsection 5.4.
As in the univariate case, it will be convenient to use the technique of
delayed reductions from section 3.7. During directed
evaluations, this means that we will actually represent elements in  by elements in ,
for . In particular,
operations in
by elements in ,
for . In particular,
operations in  on elements in
on elements in  are really performed in . We
recall that the main benefit of this representation is that projections
are really performed in . We
recall that the main benefit of this representation is that projections
 are free of charge, whenever
are free of charge, whenever  is a quotient algebra of whose elements are also
redundantly represented by elements in .
On the other hand, we will resort to reduced representations for
directed zero-tests and inversions. We will also systematically reduce
all output values. Notice that elements in can
be reduced in time
is a quotient algebra of whose elements are also
redundantly represented by elements in .
On the other hand, we will resort to reduced representations for
directed zero-tests and inversions. We will also systematically reduce
all output values. Notice that elements in can
be reduced in time  , by Lemma
5.1. In the next subsection, we detail how to perform
directed zero-tests and inversions.
, by Lemma
5.1. In the next subsection, we detail how to perform
directed zero-tests and inversions.
In the case of a single algebraic parameter, we reduced directed
inversions and zero-tests to extended gcd computations. With several
parameters the problem is more difficult. An element
in can be tested to be invertible by means of a
straight-line program over with polynomial cost
and a single zero-test in :
it essentially suffices to compute the determinant of the multiplication
endomorphism  using Berkowitz' algorithm [1]. But the cost of this approach is more than quadratic in
, which is not satisfactory
for our purposes. We now develop a more efficient strategy based on
recursive calls of the fast extended gcd algorithm in the directed
evaluation model. Note that a similar recursive approach was previously
used in the contexts of dynamic evaluation and triangular sets.
using Berkowitz' algorithm [1]. But the cost of this approach is more than quadratic in
, which is not satisfactory
for our purposes. We now develop a more efficient strategy based on
recursive calls of the fast extended gcd algorithm in the directed
evaluation model. Note that a similar recursive approach was previously
used in the contexts of dynamic evaluation and triangular sets.
Algorithm
If  then return
if
then return
if  or and otherwise. The directed splitting is left
unchanged.
or and otherwise. The directed splitting is left
unchanged.
Let  denote the preimage of , and recursively compute the extended
monic gcd of and
denote the preimage of , and recursively compute the extended
monic gcd of and  over
over  , using directed
evaluation of a computation tree for extended gcds, with the
directed splitting
, using directed
evaluation of a computation tree for extended gcds, with the
directed splitting  as extra input.
as extra input.
Let  denote the directed splitting
obtained in return and let
denote the directed splitting
obtained in return and let  be its
principal branch. This extended gcd computation also returns a
monic polynomial
be its
principal branch. This extended gcd computation also returns a
monic polynomial  ,
and
,
and  in
in  such that
the following Bézout relation holds:
such that
the following Bézout relation holds:

where  and
and  .
.
Let  ,
,  , so that the Bézout relation
, so that the Bézout relation
 holds. Compute the reduced
representations of
holds. Compute the reduced
representations of  ,
,
 ,
,  ,
,  ,
and (recall that we delayed these
reductions), and then compute
,
and (recall that we delayed these
reductions), and then compute  .
.
Deduce the Bézout relations  and
and
 by means of Lemma 4.1.
by means of Lemma 4.1.
If  , then return
true, along with the directed splitting
, then return
true, along with the directed splitting  , and the Bézout
relation of
, and the Bézout
relation of  and .
and .
If , then return
, along with the
directed splitting  ,
the Bézout relation of and , and the inverse
,
the Bézout relation of and , and the inverse  of
of  .
.
If  , then return
true, along with the directed splitting
, then return
true, along with the directed splitting  , and the Bézout
relation of and .
, and the Bézout
relation of and .
Otherwise return ,
along with the directed splitting  ,
the Bézout relation of and , and the inverse
,
the Bézout relation of and , and the inverse  of .
of .
Until the end of the paper,  represents a cost
function for products in
represents a cost
function for products in  where
where  can be any principal branch encountered in the directed evaluation model
over . Similarly,
can be any principal branch encountered in the directed evaluation model
over . Similarly,  is a cost function for reduced projections from onto .
is a cost function for reduced projections from onto .
 operations in ,
where
operations in ,
where  .
.
Proof. In step 8 we have
Consequently, the splittings in the output are directed.
In step 8, the fact that  taken modulo is the inverse of
taken modulo is the inverse of  in
in  can be verified as follows, in the same way as in section
4.1: the Bézout relation of
can be verified as follows, in the same way as in section
4.1: the Bézout relation of  and gives
and gives
which simplifies to  thanks to the Bézout
relation of and .
The correctness of the algorithm follows from these facts.
thanks to the Bézout
relation of and .
The correctness of the algorithm follows from these facts.
Let us write  for the cost of the algorithm and
recall that we are using the technique of delayed reductions. If
for the cost of the algorithm and
recall that we are using the technique of delayed reductions. If  then the cost is
then the cost is  .
Otherwise, when computing extended gcds using the fast algorithm from
section 2.2, step 2 takes
.
Otherwise, when computing extended gcds using the fast algorithm from
section 2.2, step 2 takes

operations in . Step 3 takes

further operations, and step 4 takes time  ,
by Lemma 4.1. Steps 5 to 8 require
,
by Lemma 4.1. Steps 5 to 8 require  operations in . Therefore,
there exists a universal constant
operations in . Therefore,
there exists a universal constant  such that
such that
 |
(5.1) |
Proposition 2.6 and Lemma 5.1 lead to

whence
for some universal constant  .
Using
.
Using  , unrolling the latter
inequality leads to the claimed bound.
, unrolling the latter
inequality leads to the claimed bound.
As before, let be a separable tower with
defining polynomials of degree  , and denote .
At the end of a directed evaluation, we must recover the tower
factorization of induced by the directed
splitting. We also need efficient routines for projecting onto the
residual branches. In this subsection (and contrary to the previous
subsection), we use the traditional, reduced representations for
elements in towers. We begin with a simple lemma for the computation of
Bézout relations induced by factorizations.
, and denote .
At the end of a directed evaluation, we must recover the tower
factorization of induced by the directed
splitting. We also need efficient routines for projecting onto the
residual branches. In this subsection (and contrary to the previous
subsection), we use the traditional, reduced representations for
elements in towers. We begin with a simple lemma for the computation of
Bézout relations induced by factorizations.
be monic and separable of degree
, and let  be non constant monic polynomials in such that
be non constant monic polynomials in such that
 . Given the Bézout
relation of
. Given the Bézout
relation of  and
and  , the Bézout relations of
, the Bézout relations of
 and
and  for
for  can be computed by a straight-line program in time .
can be computed by a straight-line program in time .
Proof. We first construct the subproduct tree of
: it is defined as the set of
the sub-products defined recursively as follows:
the set  if
if  ,
,
the union of  and the subproduct trees of
and the subproduct trees of
 and
and  if
if  .
.
A straightforward divide and conquer algorithm computes all these
products with arithmetic operations in . Then, we obtain the Bézout
relations for  and
and  ,
as well as for
,
as well as for  and
and  ,
in time by Lemma 4.1. We conclude
using a standard induction argument on
,
in time by Lemma 4.1. We conclude
using a standard induction argument on  .
.
 as above,
the explicitly separable factor towers
as above,
the explicitly separable factor towers  for
for
 and
and  can be computed in
time by a straight-line program, where . In addition, both directions of
the isomorphism
can be computed in
time by a straight-line program, where . In addition, both directions of
the isomorphism
 |
(5.2) |
can be computed by straight-line programs in time .
Proof. Until the end of the proof, it is convenient to keep in mind the notation for the tree factorization in Figure 5.2, associated to the directed splitting. Let us write:
 for the cost of the construction of the
explicitly separable factor towers ;
for the cost of the construction of the
explicitly separable factor towers ;
 for the cost of the projections from onto
for the cost of the projections from onto  ;
;
 for the cost of the Chinese remaindering
from to .
for the cost of the Chinese remaindering
from to .
The proof is done by induction on  .
If , then the costs are zero.
Assume now that
.
If , then the costs are zero.
Assume now that  and that explicitly separable
factor towers
and that explicitly separable
factor towers  have been constructed. We thus
have the following effective isomorphism:
have been constructed. We thus
have the following effective isomorphism:
 |
(5.3) |
We first project  and the Bézout relation
and the Bézout relation
 onto
onto  and
and  for
for  and
with cost
and
with cost  . This already
gives the defining polynomials of
. This already
gives the defining polynomials of  over
over  for and , along with the corresponding Bézout
relations.
for and , along with the corresponding Bézout
relations.
We next project the polynomials of  onto , namely
onto , namely
for  , using
operations in (it is better to use Lemma 5.1 in practice, but the present bound in terms of
, using
operations in (it is better to use Lemma 5.1 in practice, but the present bound in terms of  simplifies the analysis). From the already computed
simplifies the analysis). From the already computed  ,
,  ,
and
,
and  , we deduce the
Bézout relations of
, we deduce the
Bézout relations of  and
and  for , by means of Lemma 5.3, in time
for , by means of Lemma 5.3, in time

Overall, we have shown that there exists a universal constant such that
 |
(5.4) |
Let us now consider both directions of the isomorphism ,
represented by , we compute
the projections  and
and  for
and in time ; this already gives the images of into
for
and in time ; this already gives the images of into  for
and . Then we compute the
remainders of
for
and . Then we compute the
remainders of  modulo for
modulo for
 in time
in time  .
So there exists a universal constant
.
So there exists a universal constant  such that
such that
 |
(5.5) |
For the inverse Chinese remaindering problem, we are given  for , and
for , and  for and . We have at our disposal , its factors for and the Bézout relation of
for and . We have at our disposal , its factors for and the Bézout relation of  and . We compute
and . We compute  whose projections are
whose projections are  for :
for :
where  (resp.
(resp.  )
is the canonical preimage of
)
is the canonical preimage of  (resp. of ). Computing
costs ; see [21,
Algorithm 10.20]. The isomorphism
(resp. of ). Computing
costs ; see [21,
Algorithm 10.20]. The isomorphism

whose right-hand side contains  .
We finally recover the image of this element in
using
.
We finally recover the image of this element in
using  recursive calls of the Chinese
remaindering procedure. Altogether, this shows that there exists a
universal constant
recursive calls of the Chinese
remaindering procedure. Altogether, this shows that there exists a
universal constant  with
with
 |
(5.6) |
By using , inequality

Similarly, the relation
Finally, using our assumption that for  , the relation
, the relation

We are now ready the state the main complexity result of this section, in terms of the detailed cost functions from section 2.1.
be an explicitly separable tower
of degree , let , and let
be a computation tree over -algebras
of detailed cost  . Then the
panoramic evaluation of over
using Algorithm 3.2, along with the computation of
auxiliary data, requires
. Then the
panoramic evaluation of over
using Algorithm 3.2, along with the computation of
auxiliary data, requires

operations in . Let  denote the panoramic splitting in the output. By
means of the auxiliary data, conversions in both directions of this
isomorphism can be done in time
denote the panoramic splitting in the output. By
means of the auxiliary data, conversions in both directions of this
isomorphism can be done in time
Proof. The proof is very similar to the one of
Theorem 4.2. It is straightforward whenever  , so we may freely assume
, so we may freely assume  from now. Using redundant representations, the directed evaluation of
over requires the
following operations in :
from now. Using redundant representations, the directed evaluation of
over requires the
following operations in :
operations for the nodes of type in ;
 operations for the nodes of type by Proposition 2.6;
operations for the nodes of type by Proposition 2.6;
 operations for the zero-tests and inversions
by Lemma 5.1 and Proposition 5.2;
operations for the zero-tests and inversions
by Lemma 5.1 and Proposition 5.2;
 operations to reduce the output values, by
Lemma 5.1.
operations to reduce the output values, by
Lemma 5.1.
At the end, the directed splitting
 |
(5.7) |
satisfies
 |
(5.8) |
The finalization of the residual branches  takes
time by Lemma 5.4. In step 2 of
Algorithm 3.2 we next project the
input values of the computation tree to the residual algebras . Again by Lemma 5.4,
this can be done in time
takes
time by Lemma 5.4. In step 2 of
Algorithm 3.2 we next project the
input values of the computation tree to the residual algebras . Again by Lemma 5.4,
this can be done in time  .
.
Let denote the cost function of one panoramic
evaluation of over a -algebra of dimension  .
The above analysis shows the existence of a universal constant such that
.
The above analysis shows the existence of a universal constant such that
Unrolling this inequality at most times, thanks
to
Let  denote the cost function of the conversions
between and a panoramic splitting. Using Lemma
5.4, we conclude that
denote the cost function of the conversions
between and a panoramic splitting. Using Lemma
5.4, we conclude that
again thanks to
Before we turn to the more technical topic of speeding up computations in algebraic towers, we will have a short intermezzo to study primitive tower representations. The results in this section are essentially from [29, sections 3 and 4.1], although we slightly generalized some of them.
Let be an effective -algebra and let be an
effective -algebra with an
explicit basis  . We start by
recalling the main result from [29, section 3] about the
evaluation of multivariate polynomials in
. We start by
recalling the main result from [29, section 3] about the
evaluation of multivariate polynomials in  at
points in
at
points in  . This can in
particular be used in order to compute so-called multivariate modular
compositions. We recall that (resp.
. This can in
particular be used in order to compute so-called multivariate modular
compositions. We recall that (resp.
 ) stands for the number of
operations in that are required in order to
multiply two elements in (resp.
). We assume that
) stands for the number of
operations in that are required in order to
multiply two elements in (resp.
). We assume that  and that additions and subtractions in
and are cheaper than multiplications.
and that additions and subtractions in
and are cheaper than multiplications.
 be an effective
-algebra of rank
be an effective
-algebra of rank  , whose basis is explicitly
given. Let
, whose basis is explicitly
given. Let  with
with  for
for
 , and let
, and let  . If
. If  ,
then A(a1,…,at) can be computed by a
straight-line program in time
,
then A(a1,…,at) can be computed by a
straight-line program in time
Proof. The case  corresponds to the classical baby-step giant-step algorithm over ; see for instance [29,
section 3.1]. The extension to
corresponds to the classical baby-step giant-step algorithm over ; see for instance [29,
section 3.1]. The extension to  has been designed
in [29, section 3.2]. In [29, Proposition
3.3], the assumption for
was used for convenience. But if for some , then does
not actually appear in , so
discarding is free of charge in the
straight-line program model.
has been designed
in [29, section 3.2]. In [29, Proposition
3.3], the assumption for
was used for convenience. But if for some , then does
not actually appear in , so
discarding is free of charge in the
straight-line program model.
The main difference with [29] is that we will consider
primitive tower over arbitrary -algebras
instead of fields .
In the same spirit as section 3.7, it will also be
convenient to also integrate the idea of redundant representations in
the definition.
From an abstract point of view, given two effective -algebras and , we may use elements in as a redundant representation of elements in if we have an effective monomorphism  and an effective epimorphism
and an effective epimorphism  such that
such that  is the identity map of .
We say that is an effective retract of
. We will write
is the identity map of .
We say that is an effective retract of
. We will write  (resp.
(resp.  )
for the cost of one evaluation of
)
for the cost of one evaluation of  (resp.
(resp.  ), and we
denote
), and we
denote  .
.
From now on, assume that is a product of
separable field extensions of .
We consider a tower of ring extensions of of the
form  ,
,  for , where
is monic and explicitly separable of degree , which means that there exists a Bézout
relation with
for , where
is monic and explicitly separable of degree , which means that there exists a Bézout
relation with  and
and  .
.
consists of:
A -algebra , a monomorphism , and an epimorphism
such that is the identity map of .
Linear forms  ,
,  with
with  ,
for .
,
for .
Monic polynomials  , for
.
, for
.
 , for
and
, for
and  .
.
Writing  for the class of
for the class of  in
in  , we assume that these
data satisfy the following properties for :
, we assume that these
data satisfy the following properties for :
The following map  is a
monomorphism that extends :
is a
monomorphism that extends :
 |
 |
 |
|
 |
 |
 |
(j=1,…,i). |
The following map  with
with  is an epimorphism that extends :
is an epimorphism that extends :

The polynomials  are called
parametrizations of the
are called
parametrizations of the  in
terms of .
in
terms of .
In terms of the triangular set defined in the
introduction ( is the canonical preimage of in  ), an
element is represented by a polynomial
), an
element is represented by a polynomial  with
with  defined modulo
defined modulo  . So the conversion of
into an element of
. So the conversion of
into an element of  boils down to evaluating
boils down to evaluating  modulo
modulo  .
The backward conversion consists in evaluating the image
.
The backward conversion consists in evaluating the image  of a univariate polynomial
of a univariate polynomial  at
at
 . Both conversions are
instances of multivariate modular composition problems that can be
handled using Proposition 6.1. More precisely:
. Both conversions are
instances of multivariate modular composition problems that can be
handled using Proposition 6.1. More precisely:
 in terms of the defining polynomials , and
in terms of the defining polynomials , and
in terms of  ,
and
,
and  ,
,
such that is a primitive tower
representation of . Then
there exist straight-line programs for which:
One evaluation of  takes
takes  operations in .
operations in .
The images  for
can be computed in time
for
can be computed in time  .
.
Given  , one
evaluation of
, one
evaluation of  can be done in time
can be done in time  .
.
Proof. If for some , then does
not actually appear in polynomial representations of elements in . In the computation tree model, we
may suppress such indices without any cost. Without loss of generality
we may therefore assume that for .
The complexity bound for one evaluation of with
 is a direct consequence of Proposition 6.1.
Indeed, any element in can be represented as
, where
admits partial degrees in
for
is a direct consequence of Proposition 6.1.
Indeed, any element in can be represented as
, where
admits partial degrees in
for  . Now we can compute
. Now we can compute

in time

since . We finally notice
that  .
.
For , the map  extends coefficientwise into a map
extends coefficientwise into a map  . We may thus convert the minimal polynomial
. We may thus convert the minimal polynomial  of over
into a polynomial
of over
into a polynomial  in time
in time
The computation of then takes time  , since for all .
, since for all .
In order to evaluate  at an element
at an element  in , we write
for the preimage of and
observe that
in , we write
for the preimage of and
observe that
We first evaluate  at
at  in
in
 , where
, where  is the class of
is the class of  in
in  .
This takes time
.
This takes time  by Proposition 6.1
and yields a polynomial
by Proposition 6.1
and yields a polynomial

Since  , we next notice that
, we next notice that
so the preimage in  of
of  is
is
which represents  . Applying
. Applying
 to the
to the  coefficients of
coefficients of
 costs
costs  .
Altogether, this proves the existence of a universal constant such that
.
Altogether, this proves the existence of a universal constant such that

We conclude that can be computed in time
using our assumptions that and
for all .
If  is a field, then our definition of primitive
tower representations of coincides with the one
from [29, Definition 2.2] whenever the
are isomorphisms. If has sufficiently many
elements, then primitive tower representations can for instance be
computed using linear algebra techniques. For efficiency reasons, we
will rely on the following result that will be used later with a
parametric algebra in the role of .
is a field, then our definition of primitive
tower representations of coincides with the one
from [29, Definition 2.2] whenever the
are isomorphisms. If has sufficiently many
elements, then primitive tower representations can for instance be
computed using linear algebra techniques. For efficiency reasons, we
will rely on the following result that will be used later with a
parametric algebra in the role of .
is a field of cardinality  . Then a primitive tower representation of
can be computed using
. Then a primitive tower representation of
can be computed using  inversions and zero-tests in ,
plus
inversions and zero-tests in ,
plus  ring operations in .
ring operations in .
Remark
Remark  , then a primitive
tower representation of can be computed by a
randomized Las Vegas algorithm using an expected number of inversions and zero-tests in plus
, then a primitive
tower representation of can be computed by a
randomized Las Vegas algorithm using an expected number of inversions and zero-tests in plus
 arithmetic ring operations in .
arithmetic ring operations in .
It is more subtle to regard such randomized variants as computation
trees. Although our model does not provide us with an instruction to
compute random elements of ,
nothing prevents us from adding a “pool” of randomly chosen
elements to the input. Since randomized Las Vegas algorithms may fail
for certain random choices, they typically loop until suitable random
numbers are drawn. As explained in Remark 2.4, we may
unroll such loops to make things fit in our computation tree model,
provided that we can provide an absolute bound on the number of
times that we have to run the loop.
In our case, we claim that such an absolute bound indeed exists.
Following [29, Proposition 4.3], the construction is
incremental in : assuming
that  already found, one has to pick up a
suitable value of
already found, one has to pick up a
suitable value of  in a subset
in a subset  of of cardinality
of of cardinality  .
The crucial observation is that a suitable value always exists in this
finite set , which bounds the
number of random values that have to be tried. With
ordered randomly, can actually be found with a
bounded number of expected trials.
.
The crucial observation is that a suitable value always exists in this
finite set , which bounds the
number of random values that have to be tried. With
ordered randomly, can actually be found with a
bounded number of expected trials.
The suboptimality of the complexity bounds of Proposition 2.6
and of Theorem 5.5 appears when the height
of the tower gets as large as  .
In fact, if indeed gets large, then many of the
are necessarily small. This section is devoted
to an efficient solution to this issue.
.
In fact, if indeed gets large, then many of the
are necessarily small. This section is devoted
to an efficient solution to this issue.
Roughly speaking, as long as a product of the form  is reasonably small, it turns out to be favorable to change the given
representation of
is reasonably small, it turns out to be favorable to change the given
representation of  into a more efficient
primitive element representation
into a more efficient
primitive element representation  .
Repeating this operation as many times as necessary, the original tower
is replaced by an equivalent tower
.
Repeating this operation as many times as necessary, the original tower
is replaced by an equivalent tower  of much smaller height and for which all defining
polynomials have sufficiently large degree. Such accelerated
towers were first introduced in [29, section 4.2]. In
this section, we will further refine the concept and show how to use
such towers in combination with directed evaluation.
of much smaller height and for which all defining
polynomials have sufficiently large degree. Such accelerated
towers were first introduced in [29, section 4.2]. In
this section, we will further refine the concept and show how to use
such towers in combination with directed evaluation.
Throughout this section, we carry on with the notations from section 5: the original tower is explicitly
defined by  , and we set for . As
before, we will assume that and that for . In
particular, .
, and we set for . As
before, we will assume that and that for . In
particular, .
In this subsection, we extend the notion of accelerated towers from [29, Definition 4.6] and study accelerated tower arithmetic.
Let be an explicitly separable tower over , and let  . By [29, Lemma 4.7], there exists a
sequence of integers
. By [29, Lemma 4.7], there exists a
sequence of integers  of length
of length
 |
(7.1) |
such that, for  , we have
, we have
 |
(7.2) |
where  . In this subsection,
we assume that the sequence
. In this subsection,
we assume that the sequence  has been fixed once
and for all.
has been fixed once
and for all.
 and consider a
factor tower
and consider a
factor tower  of
of  .
Then the subsequence
.
Then the subsequence  induces a family of
towers
induces a family of
towers  over
over  for
for  . An accelerated
tower for , and
with respect to the sub-sequence ,
consists of a family of primitive tower representations of these
towers for .
More precisely, these representations comprise the following data:
. An accelerated
tower for , and
with respect to the sub-sequence ,
consists of a family of primitive tower representations of these
towers for .
More precisely, these representations comprise the following data:
A tower  over with
defining polynomials
over with
defining polynomials  ,
where
,
where  and
and  ,
and such that
,
and such that  . The
class of
. The
class of  in
in  is
written
is
written  .
.
For  :
:
Linear forms  ,
,  over for
over for  ,
,
 for
for  ,
,
 for
for  and
and  .
.
Let represent the identity map of . For and
, these data induce the
following monomorphism that extends  :
:

Let represent the identity map of . For and
, we also have the
following epimorphism that extends  :
:

and  . For and , we
finally have
. For and , we
finally have

In particular, for , we have
the following monomorphism that extends :
 |
|
 |
|
 |
|
 |
(l=ij-1+1,…,ij) |
 |
|
 |
When  , taking
, taking
 |
(7.3) |
yields
 |
(7.4) |
whence products in  can be computed using
can be computed using  operations in ,
by Proposition 2.6. The worst case complexity of products
in is therefore asymptotically better than in
operations in ,
by Proposition 2.6. The worst case complexity of products
in is therefore asymptotically better than in
 , which explains the
terminology of “accelerated towers”. Let us now detail how
to make elements in benefit from this
acceleration.
, which explains the
terminology of “accelerated towers”. Let us now detail how
to make elements in benefit from this
acceleration.
be an accelerated tower for as in Definition 7.1. Given  and
and  ,
conversions between
,
conversions between  and
via and can
be done by straight-line programs in time
and
via and can
be done by straight-line programs in time  .
.
Proof. The proof is adapted from [29,
Lemma 4.8]. Let us first assume that the polynomials  have been precomputed for
have been precomputed for  .
By Proposition 2.6,
.
By Proposition 2.6,
and by Proposition 6.3, we have

If  then such conversions simply cost
then such conversions simply cost  . Otherwise we have
. Otherwise we have  by (7.2). In both cases it follows that
by (7.2). In both cases it follows that

for some universal constant .
Unrolling the latter inequality, while taking into account that  and , we
deduce that
and , we
deduce that

Finally, given  , we notice
that can be precomputed in time
, we notice
that can be precomputed in time

by Proposition 6.3, again by distinguishing the cases when
and  .
Consequently, the total cost of these precomputations is
.
Consequently, the total cost of these precomputations is
be an accelerated
tower for as in Definition 7.1.
Given and ,
products in can be computed by a straight-line
program in time

Two polynomials of degree  over can be multiplied by a straight-line program in time
over can be multiplied by a straight-line program in time

Proof. One conversion between
and  can be done in time
can be done in time

by Lemma 7.2. On the other hand, Proposition 2.6 yields
Combining the latter costs, we deduce that
and the claimed cost for  corresponds to setting
corresponds to setting
 .
.
One motivation behind Definitions 6.2 and 7.1 with respect to the less general definitions from [29] is to allow for redundant representations. More precisely, we have:
be an accelerated tower for as in Definition 7.1. Then is an accelerated tower for any factor tower of .
Proof. A tower factor  of
is a tower factor of
of
is a tower factor of  . Let
. Let  denote the canonical
monomorphism, then
denote the canonical
monomorphism, then  is the identity of
is the identity of  . Setting
. Setting  we first verify by induction that
we first verify by induction that
 |
|
 |
|
 |
|
 |
(l=ij-1+1,…,k) |
is a monomorphism that extends  ,
for , since
,
for , since  .
.
Let  represent the identity map of . For ,
we define the epimorphism
represent the identity map of . For ,
we define the epimorphism  ,
for , that extends
,
for , that extends  :
:
Since  , we deduce that
, we deduce that  is the identity map of .
is the identity map of .
Notice that the tower is only used for the
acceleration of arithmetic operations; we do not require this tower to
be separable. Writing  for the image of
for the image of  in , our use of
redundant representations also makes it unnecessary to determine the
defining polynomials of
in , our use of
redundant representations also makes it unnecessary to determine the
defining polynomials of  .
Although the computation of such defining polynomials
.
Although the computation of such defining polynomials  along with Bézout relations for and
along with Bézout relations for and  would be convenient for speeding up multiplications
in
would be convenient for speeding up multiplications
in  , it seems tricky to
integrate these computations without deteriorating the overall
complexity.
, it seems tricky to
integrate these computations without deteriorating the overall
complexity.
When reduced, non-redundant representations are explicitly required, we will resort to the following counterpart of Lemma 5.1:
 be a factor tower of , and let
be a factor tower of , and let  be an
accelerated tower for as in Definition 7.1. Given and , the projection of an element onto can be computed by a
straight-line program in time
be an
accelerated tower for as in Definition 7.1. Given and , the projection of an element onto can be computed by a
straight-line program in time  .
.
Proof. The proof is the same as in Lemma 5.1, except that we appeal to accelerated products  of Proposition 7.3. The cost of the
projection thus becomes:
of Proposition 7.3. The cost of the
projection thus becomes:
Now (7.2) yields  for
for  . Since ,
the claimed bound follows.
. Since ,
the claimed bound follows.
be a principal
branch encountered in a directed evaluation over , and let be an
accelerated tower of , as
in Definition 7.1. Given and
, one directed zero-test or
inversion can be done in time

Proof. We adapt the proof of Proposition 5.2 so as to benefit from accelerated products. From Proposition 7.3 we have

and from Lemma 7.5 we have
Consequently, the relation
such that

Unrolling the latter inequality yields
while using the facts that and
for , by (7.2).
Now that we have seen how to benefit from accelerated arithmetic, let us show how to construct accelerated towers. We use induction on the height, in combination with Proposition 6.4. As usual, all computations in the directed model are done using the redundant representation.
Algorithm
If  , then return
, then return  for the directed splitting along with an
empty accelerated tower.
for the directed splitting along with an
empty accelerated tower.
Otherwise  ;
recursively apply the algorithm to
;
recursively apply the algorithm to  and
and
 . Let
. Let  represent the directed splitting of obtained in return, let
represent the directed splitting of obtained in return, let  be
the principal branch, and let
be
the principal branch, and let  be the
accelerated tower for .
be the
accelerated tower for .
Let  be the canonical preimages of
be the canonical preimages of  in
in  ;
compute
;
compute  ,...,
,..., .
.
By directed evaluation over  ,
starting with the directed splitting , compute a primitive tower representation
for
,
starting with the directed splitting , compute a primitive tower representation
for
seen as a tower over  .
Let
.
Let  be the directed splitting obtained
in return and let
be the directed splitting obtained
in return and let  be the corresponding
principal branch.
be the corresponding
principal branch.
The latter primitive tower representation consists of
Linear forms  ,
over for
,
over for
 ;
;
 for ;
for ;
 for and
.
for and
.
With the notation of Definition 7.1, we set  for and
for and  for and .
for and .
Compute  and define, for
and define, for  :
:
 as
as  regarded
as in
regarded
as in  ;
;
 .
.
Complete the tower with the projections
of the Bézout relations of  and
and
 over
over  ;
return this tower,
;
return this tower,  ,
and .
,
and .
 ,
then Algorithm 7.1 is correct and runs in time
,
then Algorithm 7.1 is correct and runs in time

for a sequence of integers  that satisfies
that satisfies
Proof. When entering step 5,
is an accelerated tower for ;
so we have the monomorphism  and the epimorphism
and the epimorphism
 such that
such that  is the
identity map of . We also
have the following isomorphisms for :
is the
identity map of . We also
have the following isomorphisms for :
 |
 |
 |
|
|
|
 |
(l=is-1+1,…,k). |
So the following morphisms are monomorphisms that extend , for  :
:
 |
|
 |
|
|
|
|
(l=is-1+1,…,k) |
 |
|
 |
Let
We observe that  extends
extends  and that
and that

This completes the correctness proof.
Step 1 takes constant time. In step 3, the projections require
operations in , by Lemma 7.5 and the assumption that for . Notice that the same bound holds
for step 6.
Step 4 is free of charge whenever  .
Otherwise
.
Otherwise  holds by (7.2). During
the directed evaluation of step 4, one product in the principal branch
takes
holds by (7.2). During
the directed evaluation of step 4, one product in the principal branch
takes  operations in by
Proposition 7.3, and the cost of one directed inversion is
operations in by
Proposition 7.3, and the cost of one directed inversion is
 by Proposition 7.6. Consequently,
step 4 runs in time
by Proposition 7.6. Consequently,
step 4 runs in time
In step 5 we perform

conversions from to  , which amount to
, which amount to

operations in by Lemma 7.2.
Remark , then the randomized Las
Vegas version of Proposition 6.4 (see Remark 6.6)
may be used in Algorithm 7.1, so that step 4 has an
expected cost
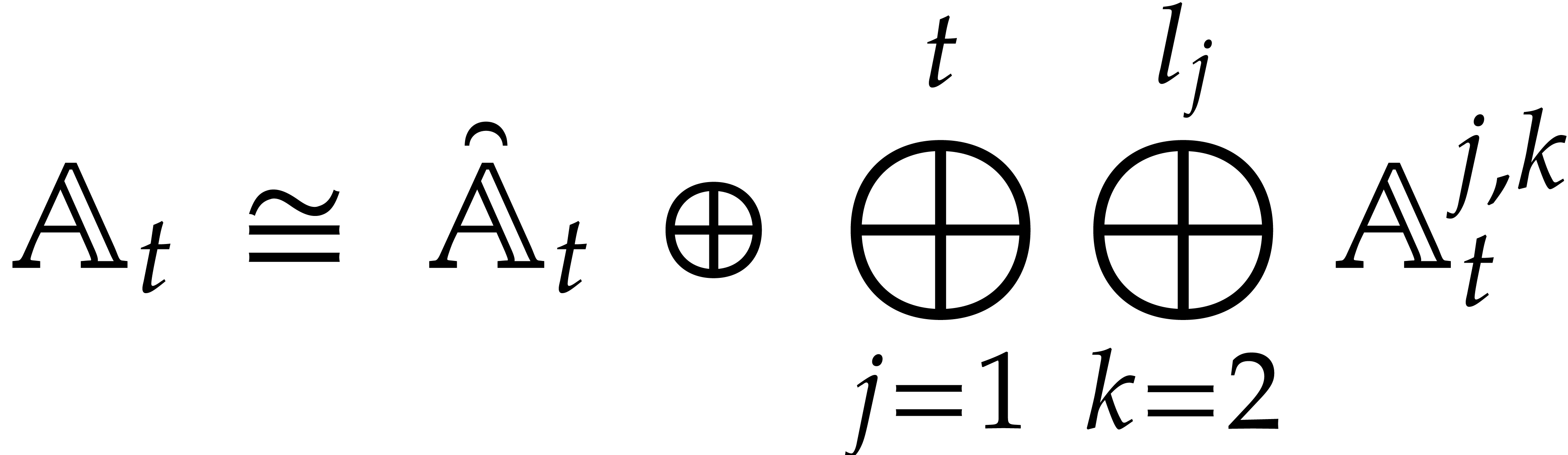
which still dominates the cost of Algorithm 7.1 in this model.
In order to make the directed evaluation benefit from accelerated
arithmetic, we first need to compute an accelerated tower. Then, the
complexity of accelerated divisions is simply adjusted according to
Proposition 7.6. At the end of a computation, we use the
following lemma in order to recover the extended tower factorization of
, as in section 5.4.
as above,
and an accelerated tower for its principal branch, the explicitly
separable factor towers for
and can be computed in time  by a straight-line program, where .
In addition, both directions of the isomorphism
by a straight-line program, where .
In addition, both directions of the isomorphism

can be computed by straight-line programs in time  .
.
Proof. The algorithm is the same as in the proof
of Lemma 5.4. We only revisit the cost analysis when using
accelerated arithmetic. Given ,
Proposition 7.3 yields

whence

In a similar way, we obtain

We deduce that
 |
|
be an explicitly separable tower
of degree , let , and let
be a computation tree over -algebras
of detailed cost , as
defined in section 2.1. Assume that . Then the panoramic evaluation of over using Algorithm 3.2,
along with the computation of auxiliary data, requires
 |
(7.5) |
operations in ,
where

Let denote the panoramic splitting in the
output. Using the auxiliary data, conversions in both directions of
this isomorphism can be done in time
 |
(7.6) |
Proof. The directed construction of the accelerated tower takes

by Proposition 7.7. Then, we project the input values onto
the principal branch, written ,
in time

by Lemma 7.5.
Let us summarize the number of operations in
needed for the directed evaluation of over , when using redundant
representations in :
operations for the nodes of type in ;
 for the nodes of type
by Proposition 7.3;
for the nodes of type
by Proposition 7.3;
 for the zero-tests and inversions by Lemma
7.5 and Proposition 7.6,
for the zero-tests and inversions by Lemma
7.5 and Proposition 7.6,
 for the reduction of the output node by
Lemma 7.5.
for the reduction of the output node by
Lemma 7.5.
At the end, the directed splitting  satisfies
satisfies
 |
(7.7) |
Then we finalize the construction of the residual branches in time
by Proposition 7.9. We next project the
input values of the tree to ,
in time
again by Proposition 7.9. We finally perform the recursive
panoramic evaluations of over . The conclusion follows as in the proof of
Theorem 5.5.
Remark  , then the factor
, then the factor  in the definition of
in the definition of  can be replaced by an
expected
can be replaced by an
expected  in Theorem 7.10, by using
the randomized variant from Remark 7.8 for the directed
construction of the accelerated tower.
in Theorem 7.10, by using
the randomized variant from Remark 7.8 for the directed
construction of the accelerated tower.
The following corollary simplifies the above complexity bound by tuning
the parameters  and .
and .
, the bound
and the bound  .
.
Proof. It suffices to take
and as in (7.3) and (7.4).
The main result of [29] is an efficient algorithm to compute products in separable towers of field extensions. We are now in a position to generalize this result to arbitrary explicitly separable towers.
be an explicitly separable tower
as in the introduction of this section. If , then products in can be
computed in time

Proof. Let  .
Applying Theorem 7.10 to the straight-line program that
simply computes a product, it requires
.
Applying Theorem 7.10 to the straight-line program that
simply computes a product, it requires  operations to compute a parametric splitting
operations to compute a parametric splitting  , auxiliary data, and the projections
, auxiliary data, and the projections  for . Using the
auxiliary data, the theorem also allows us to recover
for . Using the
auxiliary data, the theorem also allows us to recover  from these projections using
from these projections using  further operations
in . We conclude by taking
and as in (7.3)
and (7.4).
further operations
in . We conclude by taking
and as in (7.3)
and (7.4).
Another interesting application that has already been discussed in the univariate case at the end of section 4.3.3 is the computation of determinants.
be an explicitly separable
tower as in the introduction of this section. If , then the determinant of an  matrix in
matrix in  can be computed in time
can be computed in time

Proof. The proof is similar to the one of
Theorem 7.13.
As a final application, we revisit the matrix product. We need the following generalization of Proposition 2.6:
 , assume that
, assume that  . Then the product of two matrices in can be computed
in time
. Then the product of two matrices in can be computed
in time

Proof. We proceed along the same lines as
Lebreton in [35, section 3.2]; see also [29,
Proposition 2.4]. Consider two matrices  ,
we first lift the matrices to multivariate polynomial matrices in
,
we first lift the matrices to multivariate polynomial matrices in  of partial degrees in for . We
next convert these polynomial matrices to univariate polynomial matrices
in
of partial degrees in for . We
next convert these polynomial matrices to univariate polynomial matrices
in  using Kronecker substitution. We multiply
these matrices using the evaluation-interpolation technique. Since admits at least distinct
evaluation points, this can be done in time
using Kronecker substitution. We multiply
these matrices using the evaluation-interpolation technique. Since admits at least distinct
evaluation points, this can be done in time
We finally convert the result back to a polynomial matrix in , and we reduce each of the entries
with respect to using the algorithm from [35, section 3.2]. This reduction step requires  operations in .
Now our assumption that for
implies
operations in .
Now our assumption that for
implies  and
and  .
Using (2.1), we conclude that the total running time is
bounded by
.
Using (2.1), we conclude that the total running time is
bounded by
 |
|||
 |
|
|
The next proposition is an example of a less straightforward use of
Theorem 7.10, where we adapt the “acceleration
factor” to a specific situation, and where
we wish to decrease the overhead of the accelerated towers. Precisely,
after a directed construction of an accelerated tower, we obtain a
directed splitting  that satisfies
that satisfies
As a byproduct, we have an accelerated tower of
of degree at our disposal. The recursive calls
to panoramic evaluations over for  then lead to accelerated towers for each of the factor
towers of . Let
then lead to accelerated towers for each of the factor
towers of . Let  denote a bound for the sum of the degrees of all these
accelerated towers. Then we have
denote a bound for the sum of the degrees of all these
accelerated towers. Then we have

Unrolling this inequality leads to  ,
which is slightly suboptimal.
,
which is slightly suboptimal.
We may modify the construction of accelerated towers, described in
Algorithm 7.1, in order to ensure that the degree of the
accelerated tower is never more than twice the degree of the principal
branch before entering the evaluation of the given computation tree.
This is done as follows. At the end of Algorithm 7.1, we
compare the degree of the accelerated tower to
the degree of the principal branch .
If  then we are done. Otherwise, the principal
branch is much smaller than in the sense that
then we are done. Otherwise, the principal
branch is much smaller than in the sense that
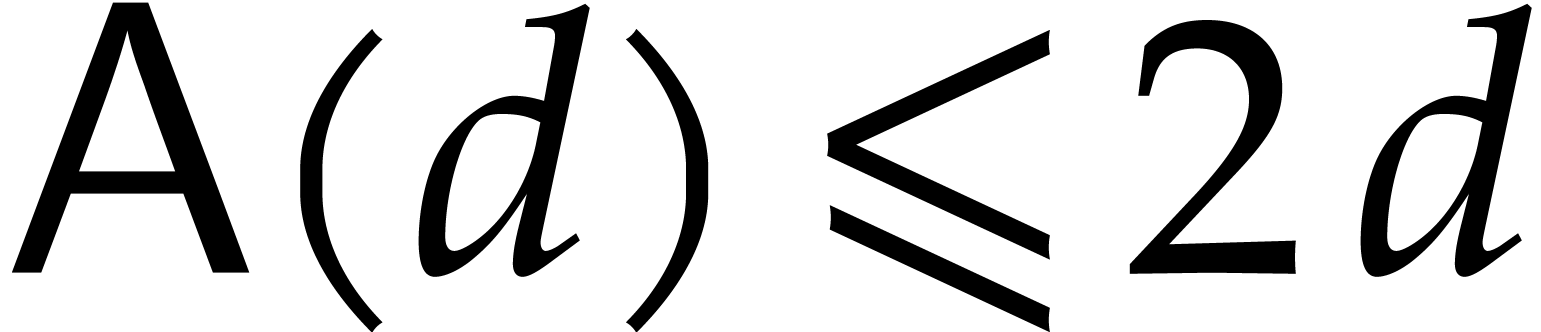 , and we use again Algorithm
7.1 in order to compute an accelerated tower for . We carry on computing a new
accelerated tower of the current principal branch in the directed model
over until the condition
is met. By Proposition 7.7, the total cost of this process
is roughly only twice as much as a single run of Algorithm 7.1
since
, and we use again Algorithm
7.1 in order to compute an accelerated tower for . We carry on computing a new
accelerated tower of the current principal branch in the directed model
over until the condition
is met. By Proposition 7.7, the total cost of this process
is roughly only twice as much as a single run of Algorithm 7.1
since

With these modifications in hand, we ensure that  .
.
be an explicitly separable
tower as in the introduction of this section. If 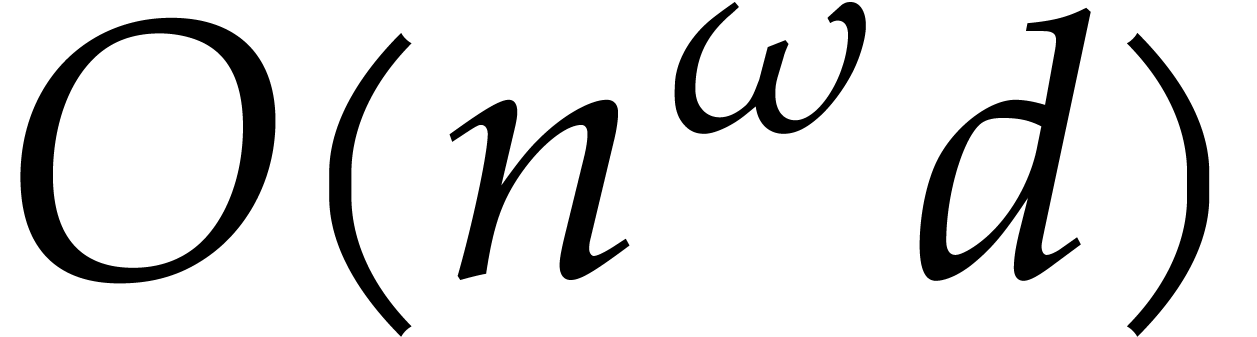 and
and  , then two matrices in can be multiplied in
time
, then two matrices in can be multiplied in
time  .
.
Proof. Let  be a fixed
positive constant. Take
be a fixed
positive constant. Take  and fix a sequence such that (7.1) and (7.2)
hold. Since , we observe that
and fix a sequence such that (7.1) and (7.2)
hold. Since , we observe that
 .
.
We first compute a single product in with the
sole purpose of retrieving a parametric splitting , together with the auxiliary data for efficient
conversions in both directions, and an accelerated tower of height for each  of degree
of degree  , where
, where  ; as discussed above. This precomputation takes time
; as discussed above. This precomputation takes time

One conversion between and  also take time
also take time
Now assume that we wish to multiply two matrices . This problem is reduced to  multiplication problems of matrices in
multiplication problems of matrices in  that we
further transform into matrix multiplications within the corresponding
accelerated towers, so Proposition 7.15, yields the cost
that we
further transform into matrix multiplications within the corresponding
accelerated towers, so Proposition 7.15, yields the cost
using the assumptions that  and .
and .
Remark . It is an
interesting question how to adapt the setting of this paper so that
complexity bounds of this type can be derived.
Theorems 4.2, 5.5, and 7.10 show that the approach of directed evaluation allows us to compute panoramic evaluations in a time that is arbitrarily close to linear. We chose the setting of computation trees as our complexity model and it is natural to ask whether similar results hold in the RAM and Turing models. This seems plausible, although technical difficulties are likely to arise in the efficient implementation of data structures on Turing machines; see [30] for a detailed analysis of a similar kind, but for another problem.
So far, we have only addressed the sequential complexity of dynamic
evaluation and its variants. It would be interesting to conduct a
similar study for parallel computation models. Dynamic evaluation lends
itself particularly well to parallel execution: whenever we encounter a
splitting, it is natural to continue the execution of each of the
branches in parallel. In the directed setting, we a priori have
to complete the execution of the principal branch in order to benefit
from the fastest possible multi-remaindering. Nevertheless, this is
really a trade-off, and we may very well start to execute some
“sufficiently thick” residual branches before completion of
the principal branch. It is also important to notice that these
considerations have only minor impact from the worst case complexity
perspective: the opportunities for this kind of parallelism only arise
when splittings actually occur. In the absence of splittings, we have to
evaluate the computation tree over the full
original algebra , so the
parallel complexity is really a function of the amount of parallelism
that is available in and in the algebra
operations of .
For our presentation, we restricted our towers to be explicitly
separable from the outset. In practice, towers are usually constructed
by adding new parameters that satisfy polynomial constraints one by one.
These polynomials may contain multiple factors, in which case one is
usually only interested in the radical ideal generated by the
constraints. This more general setting can actually also be covered
efficiently using our techniques. Indeed, consider an explicitly
separable tower and a new algebraic parameter
 that is subjected to
that is subjected to  , where
, where  is a monic
polynomial that is not necessarily separable. Then we simply compute the
separable factorization
is a monic
polynomial that is not necessarily separable. Then we simply compute the
separable factorization  as if
were a field (here assuming that the characteristic is zero or
sufficiently large), using panoramic evaluation, together with the
requested Bézout relations for the non-trivial factors
as if
were a field (here assuming that the characteristic is zero or
sufficiently large), using panoramic evaluation, together with the
requested Bézout relations for the non-trivial factors  . Let be
the resulting splitting. Then any pair
. Let be
the resulting splitting. Then any pair  with gives rise to a new explicitly separable tower of
height
with gives rise to a new explicitly separable tower of
height  , which allows us to
recurse.
, which allows us to
recurse.
In this paper, we only considered parameters that satisfy polynomial
constraints, but the technique of directed evaluation naturally
generalizes to various other settings. For instance, for an integer
parameter  , one may compute
in
, one may compute
in  as if it were a field, so
is partially factored during directed evaluations. This situation is
commonly encountered in number theory and computer algebra, where the
deterministic construction of “large” prime numbers is
rather expensive. Another possible extension of our work concerns real
algebraic numbers in the continuation of [16].
as if it were a field, so
is partially factored during directed evaluations. This situation is
commonly encountered in number theory and computer algebra, where the
deterministic construction of “large” prime numbers is
rather expensive. Another possible extension of our work concerns real
algebraic numbers in the continuation of [16].
Another direction for future work concerns the particular kind of tower
arithmetic that we build on. In this paper, we essentially combined the
best previously known generic algorithms from Theorem 2.6
with the idea of accelerated towers. For specific base fields , such as finite fields or
subfields of  , other
efficient algorithms have been proposed for tower arithmetic [9,
27, 28]. It should not be hard to combine
directed evaluation with these algorithms in order to improve on Theorem
7.10 and Corollary 7.12 for such more specific
base fields .
, other
efficient algorithms have been proposed for tower arithmetic [9,
27, 28]. It should not be hard to combine
directed evaluation with these algorithms in order to improve on Theorem
7.10 and Corollary 7.12 for such more specific
base fields .
Finally, the recent new theoretical ideas from [27–29] and this paper should also allow for more efficient software implementations, although it remains a major challenge to make this happen. In particular, this requires to implement all available approaches with care and determine the thresholds for which they are most efficient. For particularly long parametric evaluations, one may also wish to switch to towers of smaller height, and to spend more time on factoring the defining polynomials.
S. J. Berkowitz. On computing the determinant in small parallel time using a small number of processors. Inform. Process. Lett., 18:147–150, 1984.
L. Blum, F. Cucker, M. Shub, and S. Smale. Complexity and real computation. Springer Science & Business Media, 2012.
F. Boulier, F. Lemaire, and M. Moreno Maza. Well known theorems on triangular systems and the D5 principle. In J.-G. Dumas, editor, Proceedings of Transgressive Computing 2006: a conference in honor of Jean Della Dora, pages 79–92. U. J. Fourier, Grenoble, France, 2006.
P. A. Broadbery, T. Gómez-Díaz, and S. M. Watt. On the implementation of dynamic evaluation. In A. H. M. Levelt, editor, Proceedings of the 1995 International Symposium on Symbolic and Algebraic Computation, ISSAC '95, pages 77–84, New York, NY, USA, 1995. ACM.
P. Bürgisser, M. Clausen, and M. A. Shokrollahi. Algebraic complexity theory, volume 315 of Grundlehren der Mathematischen Wissenschaften. Springer-Verlag, 1997.
D. G. Cantor and E. Kaltofen. On fast multiplication of polynomials over arbitrary algebras. Acta Inform., 28:693–701, 1991.
M. Coste, H. Lombardi, and M.-F. Roy. Dynamical method in algebra: Effective nullstellensätze. Ann. Pure Appl. Logic, 111(3):203–256, 2001.
X. Dahan, M. Moreno Maza, É. Schost, and Yuzhen Xie. On the complexity of the D5 principle. In J.-G. Dumas, editor, Proceedings of Transgressive Computing 2006: a conference in honor of Jean Della Dora, pages 149–168. U. J. Fourier, Grenoble, France, 2006.
L. De Feo, J. Doliskani, and É. Schost. Fast
algorithms for -adic
towers over finite fields. In Proceedings of the 38th
International Symposium on Symbolic and Algebraic
Computation, ISSAC '13, pages 165–172, New York, NY,
USA, 2013. ACM.
J. Della Dora, C. Dicrescenzo, and D. Duval. About a new method for computing in algebraic number fields. In B. F. Caviness, editor, EUROCAL '85: European Conference on Computer Algebra Linz, Austria, April 1–3 1985 Proceedings Vol. 2: Research Contributions, pages 289–290. Springer Berlin Heidelberg, 1985.
S. Dellière. Triangularisation de systèmes constructibles : application à l'évaluation dynamique. PhD thesis, Université de Limoges. Faculté des sciences et techniques, 1999.
S. Dellière. On the links between triangular sets and dynamic constructible closure. J. Pure Appl. Algebra, 163(1):49–68, 2001.
C. Dicrescenzo and D. Duval. Algebraic extensions and algebraic closure in Scratchpad II. In P. Gianni, editor, Symbolic and Algebraic Computation. International Symposium ISSAC '88. Rome, Italy, July 4–8, 1988. Proceedings, number 358 in Lect. Notes Comput. Sci., pages 440–446. Springer-Verlag, 1989.
D. Duval. Rational Puiseux expansions. Compos. Math., 70(2):119–154, 1989.
D. Duval. Algebraic numbers: An example of dynamic evaluation. J. Symbolic Comput., 18(5):429–445, 1994.
D. Duval and L. González-Vega. Dynamic evaluation and real closure. Math. Comput. Simul., 42(4-6):551–560, 1996.
D. Duval and J.-C. Reynaud. Sketches and computation – II: dynamic evaluation and applications. Math. Structures Comput. Sci., 4(2):239–271, 1994.
H. Friedman. Algorithmic procedures, generalized Turing algorithms, and elementary recursion theory. In R. O. Gandy and C. M. E. Yates, editors, Logic Colloquium '69, volume 61 of Studies in Logic and the Foundations of Mathematics, pages 361–389. Elsevier, 1971.
A. Fröhlich and J. C. Shepherdson. On the factorisation of polynomials in a finite number of steps. Math. Z., 62:331–334, 1955.
A. Fröhlich and J. C. Shepherdson. Effective procedures in field theory. Philos. Trans. Roy. Soc. London. Ser. A., 248:407–432, 1956.
J. von zur Gathen and J. Gerhard. Modern computer algebra. Cambridge University Press, New York, 3rd edition, 2013.
T. Gómez-D az.
Examples of using dynamic constructible closure. Math.
Comput. Simul., 42(4-6):375–383, 1996.
az.
Examples of using dynamic constructible closure. Math.
Comput. Simul., 42(4-6):375–383, 1996.
D. Harvey and J. van der Hoeven. Faster polynomial multiplication over finite fields using cyclotomic coefficient rings. J. Complexity, 54:101404, 2019.
D. Harvey, J. van der Hoeven, and G. Lecerf. Faster polynomial multiplication over finite fields. J. ACM, 63(6), 2017. Article 52.
J. van der Hoeven. Automatic asymptotics. PhD thesis, École polytechnique, Palaiseau, France, 1997.
J. van der Hoeven and G. Lecerf. Composition modulo powers of polynomials. In M. Blurr, editor, Proceedings of the 2017 ACM on International Symposium on Symbolic and Algebraic Computation, ISSAC '17, pages 445–452, New York, NY, USA, 2017. ACM.
J. van der Hoeven and G. Lecerf. Modular composition via complex roots. Technical report, CNRS & École polytechnique, 2017. http://hal.archives-ouvertes.fr/hal-01455731.
J. van der Hoeven and G. Lecerf. Modular composition via factorization. J. Complexity, 48:36–68, 2018.
J. van der Hoeven and G. Lecerf. Accelerated tower arithmetic. J. Complexity, 55:101402, 2019.
J. van der Hoeven and G. Lecerf. Fast multivariate multi-point evaluation revisited. J. Complexity, 56:101405, 2020.
Xiaohan Huang and V. Y. Pan. Fast rectangular matrix multiplication and applications. J. Complexity, 14(2):257–299, 1998.
E. Kaltofen. On computing determinants of matrices without divisions. In P. S. Wang, editor, ISSAC 92 International Symposium on Symbolic Algebraic Computation, ISSAC '92, pages 342–349, New York, NY, USA, 1992. ACM.
K. S. Kedlaya and C. Umans. Fast polynomial factorization and modular composition. SIAM J.Comput., 40(6):1767–1802, 2011.
F. Le Gall. Powers of tensors and fast matrix multiplication. In K. Nabeshima, editor, ISSAC'14: International Symposium on Symbolic and Algebraic Computation, pages 296–303, New York, NY, USA, 2014. ACM.
R. Lebreton. Relaxed Hensel lifting of triangular sets. J. Symbolic Comput., 68(2):230–258, 2015.
G. Lecerf. Computing the equidimensional decomposition of an algebraic closed set by means of lifting fibers. J. Complexity, 19(4):564–596, 2003.
G. Lecerf. On the complexity of the Lickteig–Roy subresultant algorithm. J. Symbolic Comput., 92:243–268, 2019.
A. Poteaux and É. Schost. Modular composition modulo triangular sets and applications. Comput. Complex., 22(3):463–516, 2013.
A. Poteaux and É. Schost. On the complexity of computing with zero-dimensional triangular sets. J. Symbolic Comput., 50:110–138, 2013.
F. P. Preparata and D. V. Sarwate. An improved parallel processor bound in fast matrix inversion. Inform. Process. Lett., 7(3):148–150, 1978.
J. C. Reynolds. The discoveries of continuations. LISP and Symbolic Computation, 6:233–247, 1993.
 and a single input node. Let
and a single input node. Let  represent the
represent the  then return
then return  is shown on the
right-hand side. The input node is a circle, computation nodes are
long rectangles, output nodes are shorter rectangles, and branching
nodes are diamond-shaped.
is shown on the
right-hand side. The input node is a circle, computation nodes are
long rectangles, output nodes are shorter rectangles, and branching
nodes are diamond-shaped.
 ,
, ,
,
 .
.
 .
.
 of
of
 ,
, of
of  ,
, ,
, is either zero or invertible in
is either zero or invertible in  whenever
whenever  .
. .
.