Fast Polynomial Multiplication over  |
|
|
School of Mathematics and Statistics
University of New South Wales
Sydney NSW 2052
Australia
|
|
|
|
Joris van der Hoeven,
Grégoire Lecerf
|
|
Laboratoire d'informatique de
l'École polytechnique
LIX, UMR 7161 CNRS
Campus de l'École polytechnique
1, rue Honoré d'Estienne d'Orves
Bâtiment Alan Turing, CS35003
91120 Palaiseau, France
|
|
{vdhoeven,lecerf}@lix.polytechnique.fr
|
|
|
|
Abstract
Can post-Schönhage–Strassen multiplication algorithms be
competitive in practice for large input sizes? So far, the GMP library
still outperforms all implementations of the recent, asymptotically more
efficient algorithms for integer multiplication by Fürer,
De–Kurur–Saha–Saptharishi, and ourselves. In this
paper, we show how central ideas of our recent asymptotically fast
algorithms turn out to be of practical interest for multiplication of
polynomials over finite fields of characteristic two. Our Mathemagix
implementation is based on the automatic generation of assembly
codelets. It outperforms existing implementations in large degree,
especially for polynomial matrix multiplication over finite fields.
Categories and Subject Descriptors
F.2.1 [Analysis of algorithms and problem complexity]: Numerical
Algorithms and Problems—Computations in finite fields; G.4
[Mathematical software]: Algorithm design and analysis
General Terms
Algorithms, Theory
Keywords
Finite fields; Polynomial multiplication; Mathemagix
1.Introduction
Let  denote the finite field with
denote the finite field with  elements. In this article we are interested in multiplying
polynomials in
elements. In this article we are interested in multiplying
polynomials in  . This is a
very basic and classical problem in complexity theory, with major
applications to number theory, cryptography and error correcting codes.
. This is a
very basic and classical problem in complexity theory, with major
applications to number theory, cryptography and error correcting codes.
1.1Motivation
Let  denote the bit complexity of multiplying two
polynomials of degree
denote the bit complexity of multiplying two
polynomials of degree  in . Until recently, the best asymptotic bound for this
complexity was
in . Until recently, the best asymptotic bound for this
complexity was  , using a
triadic version [32] of the classical
Schönhage–Strassen algorithm [33].
, using a
triadic version [32] of the classical
Schönhage–Strassen algorithm [33].
In [21], we improved this bound to  , where
, where  The factor
The factor  increases so slowly that it is impossible to observe the
asymptotic behavior of our algorithm in practice. Despite this, the
present paper demonstrates that some of the new techniques introduced in
[20, 21] can indeed lead to more efficient
implementations.
increases so slowly that it is impossible to observe the
asymptotic behavior of our algorithm in practice. Despite this, the
present paper demonstrates that some of the new techniques introduced in
[20, 21] can indeed lead to more efficient
implementations.
One of the main reasons behind the observed acceleration is that [21] contains a natural analogue for the three primes
FFT approach to multiplying integers [30]. For a
single multiplication, this kind of algorithm is more or less as
efficient as the Schönhage–Strassen algorithm: the FFTs
involve more expensive arithmetic, but the inner products are faster. On
recent architectures, the three primes approach for integer
multiplication generally has performance superior to that of
Schönhage–Strassen due to its cache efficiency [25].
The compactness of the transformed representations also makes the three
primes approach very useful for linear algebra. Accordingly, the
implementation described in this paper is very efficient for matrix
products over . This is
beneficial for many applications such as half gcds, polynomial
factorization, geometric error correcting codes, polynomial system
solving, etc.
1.2Related work and our contributions
Nowadays the Schönhage–Strassen algorithm is widely used in
practice for multiplying large integers [18] and
polynomials [4, 19]. For integers, it was the
asymptotically fastest known until Fürer's algorithm [11,
12] with cost  ,
for input bit sizes
,
for input bit sizes  , where
, where
 is some constant (an optimized version [20]
yields the explicit value
is some constant (an optimized version [20]
yields the explicit value  ).
However, no-one has yet demonstrated a practical implementation for
sizes supported by current technology. The implementation of the modular
variant proposed in [7] has even been discussed in detail
in [28]: their conclusion is that the break-even point
seems to be beyond astronomical sizes.
).
However, no-one has yet demonstrated a practical implementation for
sizes supported by current technology. The implementation of the modular
variant proposed in [7] has even been discussed in detail
in [28]: their conclusion is that the break-even point
seems to be beyond astronomical sizes.
In [20, 21] we developed a unified alternative
strategy for both integers and polynomials. Roughly speaking, products
are performed via discrete Fourier transforms (DFTs)
that are split into smaller ones. Small transforms then reduce to
smaller products. When these smaller products are still large enough,
the algorithm is used recursively. Since the input size decreases
logarithmically between recursive calls, there is of course just one
such recursive call in practice. Our implementation was guided by these
ideas, but, in the end, only a few ingredients were retained. In fact,
we do not recurse at all; we handle the smaller subproducts directly
over  with the Karatsuba algorithm.
with the Karatsuba algorithm.
For polynomials over finite fields, one key ingredient of [21]
is the construction of suitable finite fields: we need the cardinality
of their multiplicative groups to have sufficiently many small prime
factors. A remarkable example is ,
outlined at the end of [21], for which we have:

Section 3 contains our first contribution: a detailed
optimized implementation of DFTs over .
We propose several original tricks to make it highly competitive on
processors featuring carry-less products. For DFTs of small
prime sizes we appeal to seminal techniques due to Rader [31]
and Winograd [36]. Then the prime-factor
algorithm, also called Good–Thomas [17, 35],
is used in medium sizes, while the Cooley–Tukey algorithm [5] serves for large sizes.
In Section 4, we focus on other finite fields . When  is a divisor of
is a divisor of
 , we design efficient
embeddings into , and compare
to the use of Kronecker segmentation and padding. For values of up to
, we design efficient
embeddings into , and compare
to the use of Kronecker segmentation and padding. For values of up to  , we
propose a new algorithm to reduce computations to , in the vein of the three prime FFT technique. This
constitutes our second contribution.
, we
propose a new algorithm to reduce computations to , in the vein of the three prime FFT technique. This
constitutes our second contribution.
The practical performance of our implementation is reported in Section
5. We compare to the optimized reference library gf2x, developed by Brent, Gaudry, Thomé and
Zimmermann [4], which assembles Karatsuba, Toom–Cook
and the triadic Schönhage–Strassen algorithms with
automatically tuned thresholds. The high performance of our
implementation is of course a major outcome of this paper.
For detailed references on asymptotically fast algorithms to univariate
polynomials over and some applications, we refer
the reader to [4, 20, 21]. The
present article does not formally rely on [21]. In the next
section we recall and slightly adapt classical results, and present our
implementation framework. Our use of codelets for small and
moderate sizes of DFT is customary in other high performance software,
such as FFTW3 and SPIRAL [10, 29].
2.Preliminaries
This section gathers classical building blocks used by our DFT
algorithm. We also describe our implementation framework. If  and
and  are elements of a Euclidean
domain, then
are elements of a Euclidean
domain, then  and
and  respectively represent the related quotient and remainder in the
division of by ,
so that
respectively represent the related quotient and remainder in the
division of by ,
so that  holds.
holds.
2.1Discrete Fourier transforms
Let  be positive integers, let
be positive integers, let  ,
,  ,
and
,
and  . The
. The  -expansion of
-expansion of  is the sequence of integers
is the sequence of integers  such that
such that  and
and

The -mirror, written
 , of
relative to , is the integer
defined by the following reverse expansion:
, of
relative to , is the integer
defined by the following reverse expansion:

Let  be a commutative field, and let
be a commutative field, and let  be a primitive -th
root of unity, which means that
be a primitive -th
root of unity, which means that  ,
and
,
and  for all
for all  .
The discrete Fourier transform (with respect to
.
The discrete Fourier transform (with respect to  ) of an -tuple
) of an -tuple
 is the -tuple
is the -tuple
 given by
given by  .
In other words we have
.
In other words we have  ,
where
,
where  . For efficiency
reasons, in this article, we compute the
. For efficiency
reasons, in this article, we compute the  in the
-mirror order, where corresponds to a certain ordering of the prime
factors of , counted with
multiplicities, that will be optimized later. We shall use the following
notation:
in the
-mirror order, where corresponds to a certain ordering of the prime
factors of , counted with
multiplicities, that will be optimized later. We shall use the following
notation:

Let  , and let us split into
, and let us split into  and
and  . We recall the Cooley–Tukey
algorithm [5] in the present setting: it decomposes
. We recall the Cooley–Tukey
algorithm [5] in the present setting: it decomposes
 into
into  and
and  , where
, where  and
and  .
.
Algorithm 1 (In-place Cooley–Tukey
algorithm)
Proposition 1. Algorithm
1 is correct.
Proof. Let  be the
successive values of the vector
be the
successive values of the vector  at the end of
steps 1, 2, and 3. We have
at the end of
steps 1, 2, and 3. We have  ,
,
 , and
, and  . It follows that
. It follows that  .
The conclusion follows from
.
The conclusion follows from  ,
which implies
,
which implies  .
.
Notice that the order of the output depends on , but not on  .
If the input vector is stored in a contiguous segment of memory, then
the first step of Algorithm 1 may be seen as an
.
If the input vector is stored in a contiguous segment of memory, then
the first step of Algorithm 1 may be seen as an  matrix transposition, followed by
matrix transposition, followed by  in-place DFTs
of size
in-place DFTs
of size  on contiguous data. Then the
transposition is inverted. The constants
on contiguous data. Then the
transposition is inverted. The constants  in step
2 are often called twiddle factors. Transpositions affect the
performance of the strided DFTs when input sizes do not fit in the last
level cache memory of the processor.
in step
2 are often called twiddle factors. Transpositions affect the
performance of the strided DFTs when input sizes do not fit in the last
level cache memory of the processor.
For better locality, the multiplications by twiddle factors in step 2
are actually merged into step 3, and all the necessary primitive roots
and fixed multiplicands (including the twiddle factors) are pre-computed
once, and cached in memory. We finally notice that the inverse DFT can
be computed straightforwardly by inverting Algorithm 1.
In addition to the Cooley–Tukey algorithm we shall also use the
method attributed to Good and Thomas [17,
35], and that saves all the multiplications by the twiddle
factors. First it requires the  to be pairwise
coprime, and second, input and output data must be re-indexed. The rest
is identical to Algorithm 1—see
[8], for instance, for complete formulas. With , the condition on the
fails only when two are
to be pairwise
coprime, and second, input and output data must be re-indexed. The rest
is identical to Algorithm 1—see
[8], for instance, for complete formulas. With , the condition on the
fails only when two are  or
or  . In such a case, it is
sufficient to replace by a new vector where the
two occurrences of (resp. of ) are replaced by
. In such a case, it is
sufficient to replace by a new vector where the
two occurrences of (resp. of ) are replaced by  (resp. by
(resp. by  ), and to modify
the re-indexing accordingly. In sizes 9 and 25, we build codelets upon
the Cooley–Tukey formulas. A specific codelet for
), and to modify
the re-indexing accordingly. In sizes 9 and 25, we build codelets upon
the Cooley–Tukey formulas. A specific codelet for  might further improve performance, but we did not implement this yet. We
hardcoded the re-indexing into codelets, and we restrict to using the
Good–Thomas algorithm up to sizes that fit into the cache memory.
We shall discuss later the relative performance between these two DFT
algoritms.
might further improve performance, but we did not implement this yet. We
hardcoded the re-indexing into codelets, and we restrict to using the
Good–Thomas algorithm up to sizes that fit into the cache memory.
We shall discuss later the relative performance between these two DFT
algoritms.
2.2Rader reduction
When the recurrence of the Cooley–Tukey algorithm ends
with a DFT of prime size ,
then we may use Rader's algorithm [31] to reduce such a DFT
to a cyclic polynomial product by a fixed multiplicand.
In fact, let  , let
, let  be a generator of the multiplicative group of
be a generator of the multiplicative group of  , and let
, and let  be its
modular inverse. We let
be its
modular inverse. We let  and
and  , and we compute
, and we compute  .
The coefficient
.
The coefficient  of
of  in
in
 equals
equals  .
Consequently we have
.
Consequently we have  where
where  is the permutation of
is the permutation of  defined by
defined by  . In this way, the DFT of
reduces to one cyclic product of size
. In this way, the DFT of
reduces to one cyclic product of size  ,
by the fixed multiplicand
,
by the fixed multiplicand  .
.
Remark 2. Bluestein reduction [2]
allows for the conversion of DFTs into cyclic products even when  is not prime. In [21], this is crucially
used for controlling the size of recursive DFTs.
This suggests that Bluestein reduction might be useful in practice for
DFTs of small composite orders, say
is not prime. In [21], this is crucially
used for controlling the size of recursive DFTs.
This suggests that Bluestein reduction might be useful in practice for
DFTs of small composite orders, say  .
For DFTs over , this turns
out to be wrong: so far, the strategies to be described in Section 3 are more efficient.
.
For DFTs over , this turns
out to be wrong: so far, the strategies to be described in Section 3 are more efficient.
2.3Implementation framework
Throughout this article, we consider a platform equipped with an Intel(R) Core(TM) i7-4770
CPU at  GHz and 8 GB of
GHz and 8 GB of  MHz DDR3 memory, which features AVX2 and CLMUL
technologies (family number
MHz DDR3 memory, which features AVX2 and CLMUL
technologies (family number  and model number
0x3C). The platform runs the Jessie GNU Debian
operating system with a 64 bit Linux kernel
version 3.14. Care has been taken to avoid CPU throttling and
Turbo Boost issues while measuring timings. We compiled with
GCC [15] version 4.9.2.
and model number
0x3C). The platform runs the Jessie GNU Debian
operating system with a 64 bit Linux kernel
version 3.14. Care has been taken to avoid CPU throttling and
Turbo Boost issues while measuring timings. We compiled with
GCC [15] version 4.9.2.
In order to efficiently and easily benefit from AVX and CLMUL
instruction sets, we decided to implement the lowest level of our DFTs
directly in assembly code. In fact there is no standard way to take full
advantage of these technologies within languages such as C
and C++, where current SIMD types are not even
bona fide. It is true that programming via
intrinsics [26] is a reasonable compromise, but
there remain a certain number of technical pitfalls such as memory
alignment, register allocation, and instruction latency management.
For our convenience we developed dynamic compilation features
(also known as just in time compilation) from scratch,
dedicated to high performance computing within Mathemagix
(http://www.mathemagix.org). It is only
used to tune assembly code for DFTs of orders a few thousands. Our
implementation in the Runtime library partially
supports the x86, SSE, and AVX instruction sets for the amd64
application binary interface—missing instructions can be added easily. This of course
suits most personal computers and computation clusters.
The efficiency of an SSE or AVX instruction is not easy to determine. It
depends on the types of its arguments, and is usually measured in terms
of latency and throughput. In ideal conditions, the latency is
the number of CPU clock cycles needed to make the result of an
instruction available to another instruction; the reciprocal
throughput, sometimes called issue latency, is the
(fractional) number of cycles needed to actually perform the
computation—for brevity,
we drop “reciprocal”. For detailed definitions we refer the
reader to [26], and also to [9] for useful
additional comments.
In this article, we shall only use AVX-128 instructions, and 128-bit
registers are denoted xmm0,…, xmm15
(our code is thus compatible with the previous generation of
processors). A 128-bit register may be seen as a vector of two 64-bit
integers, that are said to be packed in it. We provide
unfamiliar readers with typical examples for our aforementioned
processor, with cost estimates, and using the Intel
syntax, where the destination is the first argument of instructions:
-
vmovq loads/stores 64-bits integers from/to memory.
vmovdqu loads/stores packed 64-bits integers not
necessary aligned to 256-bit boundaries. vmovdqa is
similar to vmovdqu when data is aligned on a 256-bit
boundary; it is also used for moving data between registers.
Latencies of these instructions are between 1 and 4, and throughputs
vary between  and
and  .
.
-
vpand, vpor, and vpxor
respectively correspond to bitwise “and”,
“or” and “xor” operations. Latencies are
and throughputs are  or
or  .
.
-
vpsllq and vpsrlq respectively
perform left and right logical shifts on 64-bit packed integers,
with latency 1 or  , and
throughput 1. We shall also use vpunpckhqdq xmm1, xmm2,
xmm3/m128 to unpack and interleave in xmm1 the
64-bit integers from the high half of xmm2 and xmm3/m128, with latency and throughput 1. Here, xmm1, xmm2, and xmm3 do
not mean that the instruction only acts on these specific registers:
instead, the indices 1, 2, and 3 actually refer to argument
positions. In addition, the notation xmm3/m128 means
that the third argument may be either a register or an adress
pointing to 128-bit data to be read from the memory.
, and
throughput 1. We shall also use vpunpckhqdq xmm1, xmm2,
xmm3/m128 to unpack and interleave in xmm1 the
64-bit integers from the high half of xmm2 and xmm3/m128, with latency and throughput 1. Here, xmm1, xmm2, and xmm3 do
not mean that the instruction only acts on these specific registers:
instead, the indices 1, 2, and 3 actually refer to argument
positions. In addition, the notation xmm3/m128 means
that the third argument may be either a register or an adress
pointing to 128-bit data to be read from the memory.
-
vpclmulqdq xmm1, xmm2, xmm3/m128,
imm8 carry-less multiplies two 64-bit integers, selected from
xmm2 and  according to the
constant integer imm8, and stores the result into
xmm1. The value
according to the
constant integer imm8, and stores the result into
xmm1. The value  for imm8 means that the multiplicands are the 64-bit
integers from the low half of xmm2 and xmm3/m128.
Mathematically speaking, this corresponds to multiplying two
polynomials in
for imm8 means that the multiplicands are the 64-bit
integers from the low half of xmm2 and xmm3/m128.
Mathematically speaking, this corresponds to multiplying two
polynomials in  of degrees
of degrees  , which are packed into integers: such a
polynomial is thus represented by a
, which are packed into integers: such a
polynomial is thus represented by a  -bit
integer, whose -th bit
corresponds to the coefficient of degree . This instruction has latency 7 and throughput
2. This high latency constitutes an important issue when optimizing
the assembly code. This will be discussed later.
-bit
integer, whose -th bit
corresponds to the coefficient of degree . This instruction has latency 7 and throughput
2. This high latency constitutes an important issue when optimizing
the assembly code. This will be discussed later.
3.DFTs over
In order to perform DFTs efficiently, we are interested in
finite fields such that  admits many small prime factors. This is typically the case [21]
when admits many small prime factors itself. Our
favorite example is
admits many small prime factors. This is typically the case [21]
when admits many small prime factors itself. Our
favorite example is  , also
because is only slightly smaller than the bit
size of registers on modern architectures.
, also
because is only slightly smaller than the bit
size of registers on modern architectures.
Using the eight smallest prime divisors of  allows us to perform DFTs up to size
allows us to perform DFTs up to size  ,
which is sufficiently large for most of the applications. We thus begin
with building DFTs in size ,
,
,
which is sufficiently large for most of the applications. We thus begin
with building DFTs in size ,
,  ,
,  ,
,  ,
,  ,
,
 ,
,  , and then combine them using the Good–Thomas
and Cooley–Tukey algorithms.
, and then combine them using the Good–Thomas
and Cooley–Tukey algorithms.
3.1Basic arithmetic in
The other key advantage of is the following
defining polynomial  .
Elements of will thus be seen as polynomials in
.
Elements of will thus be seen as polynomials in
 modulo
modulo  .
.
For multiplying and in
, we perform the product  of the preimage polynomials, so that the preimage
of the preimage polynomials, so that the preimage
 of
of  may be obtained as
follows
may be obtained as
follows

The remainder by  may be performed efficiently by
using bit shifts and bitwise xor. The final division by
corresponds to a single conditional subtraction of .
may be performed efficiently by
using bit shifts and bitwise xor. The final division by
corresponds to a single conditional subtraction of .
In order to decrease the reduction cost, we allow an even more redundant
representation satisfying the minimal requirement that data sizes are
 bits. If
bits. If  have degrees
, then
have degrees
, then  may be reduced in-place by
may be reduced in-place by  ,
using the following macro, where xmm1 denotes any
auxiliary register, and
,
using the following macro, where xmm1 denotes any
auxiliary register, and  represents a register
different from xmm1 that contains :
represents a register
different from xmm1 that contains :
vpunpckhqdq xmm1, xmm0, xmm0
vpsllq xmm1, xmm1, 3
vpxor xmm0, xmm0, xmm1
In input contains the  -bit packed polynomial, and its -bit reduction is stored in its low half in
output. Let us mention from here that our implementation does not yet
fully exploit vector instructions of the SIMD unit. In fact we only use
the 64-bit low half of the -bit
registers, except for DFTs of small orders as explained in the next
paragraphs.
-bit packed polynomial, and its -bit reduction is stored in its low half in
output. Let us mention from here that our implementation does not yet
fully exploit vector instructions of the SIMD unit. In fact we only use
the 64-bit low half of the -bit
registers, except for DFTs of small orders as explained in the next
paragraphs.
3.2DFTs of small prime orders
In size  , it is
classical that a DFT needs only one product and one reduction:
, it is
classical that a DFT needs only one product and one reduction:  . This strategy generalizes to
larger as follows, via the Rader
reduction of Section 2.2, that involves a product of the
form
. This strategy generalizes to
larger as follows, via the Rader
reduction of Section 2.2, that involves a product of the
form
 |
(1) |
The coefficient of degree
of  satisfies:
satisfies:
 |
(2) |
This amounts to  products,
products,  sums (even less if the
sums (even less if the  are pre-computed), and
reductions.
are pre-computed), and
reductions.
We handcrafted these formulas in registers for  . Products are computed by vpclmulqdq.
They are not reduced immediately. Instead we perform bitwise arithmetic
on 128-bit registers, so that reductions to 64-bit integers are
postponed to the end. The following table counts instructions of each
type. Precomputed constants are mostly read from memory and not stored
in registers. The last column cycles contains the number of CPU
clock cycles, measured with the CPU instruction rdtsc,
when running the DFT code in-place on contiguous data already present in
the level 1 cache memory.
. Products are computed by vpclmulqdq.
They are not reduced immediately. Instead we perform bitwise arithmetic
on 128-bit registers, so that reductions to 64-bit integers are
postponed to the end. The following table counts instructions of each
type. Precomputed constants are mostly read from memory and not stored
in registers. The last column cycles contains the number of CPU
clock cycles, measured with the CPU instruction rdtsc,
when running the DFT code in-place on contiguous data already present in
the level 1 cache memory.
|
clmul |
shift |
xor |
move |
cycles |
| 3 |
1 |
2 |
7 |
6 |
19 |
| 5 |
10 |
8 |
22 |
10 |
37 |
| 7 |
21 |
12 |
45 |
14 |
58 |
For  , these computations do
not fit into the 16 registers, and using auxiliary memory introduces
unwanted overhead. This is why we prefer to use the method described in
the next subsection.
, these computations do
not fit into the 16 registers, and using auxiliary memory introduces
unwanted overhead. This is why we prefer to use the method described in
the next subsection.
3.3DFTs of larger prime orders
For larger DFTs we still use the Rader reduction (1) but it is worth using Karatsuba's method
instead of formula (2). Let  , and let
, and let  if is odd and 0 otherwise. We decompose
if is odd and 0 otherwise. We decompose  , and
, and  ,
where
,
where  have degrees
have degrees  .
Then
.
Then  may be computed as
may be computed as  , where
, where  ,
,
 , and
, and  are obtained by the Karatsuba algorithm.
are obtained by the Karatsuba algorithm.
If is odd, then during the recursive calls for
 , we collect
, we collect  , for
, for  .
Then we compute
.
Then we compute  , so that the
needed
, so that the
needed  are obtained as
are obtained as  .
.
During the recursive calls, reductions of products are discarded, and
sums are performed over 128 bits. The total number of reductions at the
end thus equals . We use
these formulas for  . For
. For  this approach leads to fewer products than with the
previous method, but the number of sums and moves is higher, as reported
in the following table:
this approach leads to fewer products than with the
previous method, but the number of sums and moves is higher, as reported
in the following table:
|
clmul |
shift |
xor |
move |
cycles |
| 5 |
9 |
8 |
34 |
52 |
63 |
| 7 |
18 |
12 |
76 |
83 |
83 |
| 11 |
42 |
20 |
184 |
120 |
220 |
| 13 |
54 |
24 |
244 |
239 |
450 |
| 31 |
270 |
60 |
1300 |
971 |
2300 |
| 41 |
378 |
80 |
1798 |
1156 |
3000 |
| 61 |
810 |
120 |
3988 |
2927 |
7300 |
For readability only the two most significant figures are reported in
column cycles. The measurements typically vary by up to about
10%. It might be possible to further improve these timings by polishing
register allocation, decreasing temporary memory, reducing latency
effects, or even by trying other strategies [1, 3].
3.4DFTs of composite orders
As long as the input data and the pre-computed constants fit into the
level 3 cache of the processor (in our case, 8 MB), we may simply unfold
Algorithm 1: we do not transpose-copy data in step 1, but rather
implement DFT codelets of small prime orders, with suitable input and
output strides. For instance, in size  ,
we perform five in-place DFTs of order 3 with stride , namely on
,
we perform five in-place DFTs of order 3 with stride , namely on 
 , then we multiply by those twiddle factors not
equal to 1, and finally, we do three in-place DFTs of size and stride . In
order to minimize the effect of the latency of vpclmulqdq,
carry-less products by twiddle factors and reductions may be organized
in groups of 8, so that the result of each product is available when
arriving at its corresponding reduction instructions. More precisely, if
rdi contains the current address to entries in , and rsi the
current address to the twiddle factors, then 8 entry-wise products are
performed as follows:
, then we multiply by those twiddle factors not
equal to 1, and finally, we do three in-place DFTs of size and stride . In
order to minimize the effect of the latency of vpclmulqdq,
carry-less products by twiddle factors and reductions may be organized
in groups of 8, so that the result of each product is available when
arriving at its corresponding reduction instructions. More precisely, if
rdi contains the current address to entries in , and rsi the
current address to the twiddle factors, then 8 entry-wise products are
performed as follows:
vmovq xmm0, [rdi+8*0]
vmovq xmm1, [rdi+8*1]
…
vmovq xmm7, [rdi+8*7]
vpclmulqdq xmm0, xmm0, [rsi+8*0], 0
vpclmulqdq xmm1, xmm1, [rsi+8*1], 0
…
vpclmulqdq xmm7, xmm7, [rsi+8*7], 0
Then the contents of xmm0,…,xmm7
are reduced in sequence modulo ,
and finally the results are stored into memory.
Up to sizes  made from primes
made from primes  , we generated executable codes for the
Cooley–Tukey algorithm, and measured timings for all the possible
orderings . This revealed
that increasing orders, namely
, we generated executable codes for the
Cooley–Tukey algorithm, and measured timings for all the possible
orderings . This revealed
that increasing orders, namely  ,
yield the best performances. In size
,
yield the best performances. In size  ,
one transform takes
,
one transform takes  CPU cycles, among which
CPU cycles, among which  are spent in multiplications by twiddle factors. We
implemented the Good–Thomas algorithm in the same way as for
Cooley–Tukey, and concluded that it is always faster when data fit
into the cache memory. When
are spent in multiplications by twiddle factors. We
implemented the Good–Thomas algorithm in the same way as for
Cooley–Tukey, and concluded that it is always faster when data fit
into the cache memory. When  ,
this leads to only
,
this leads to only  cycles for one transform, for
which carry-less products contribute
cycles for one transform, for
which carry-less products contribute  %.
%.
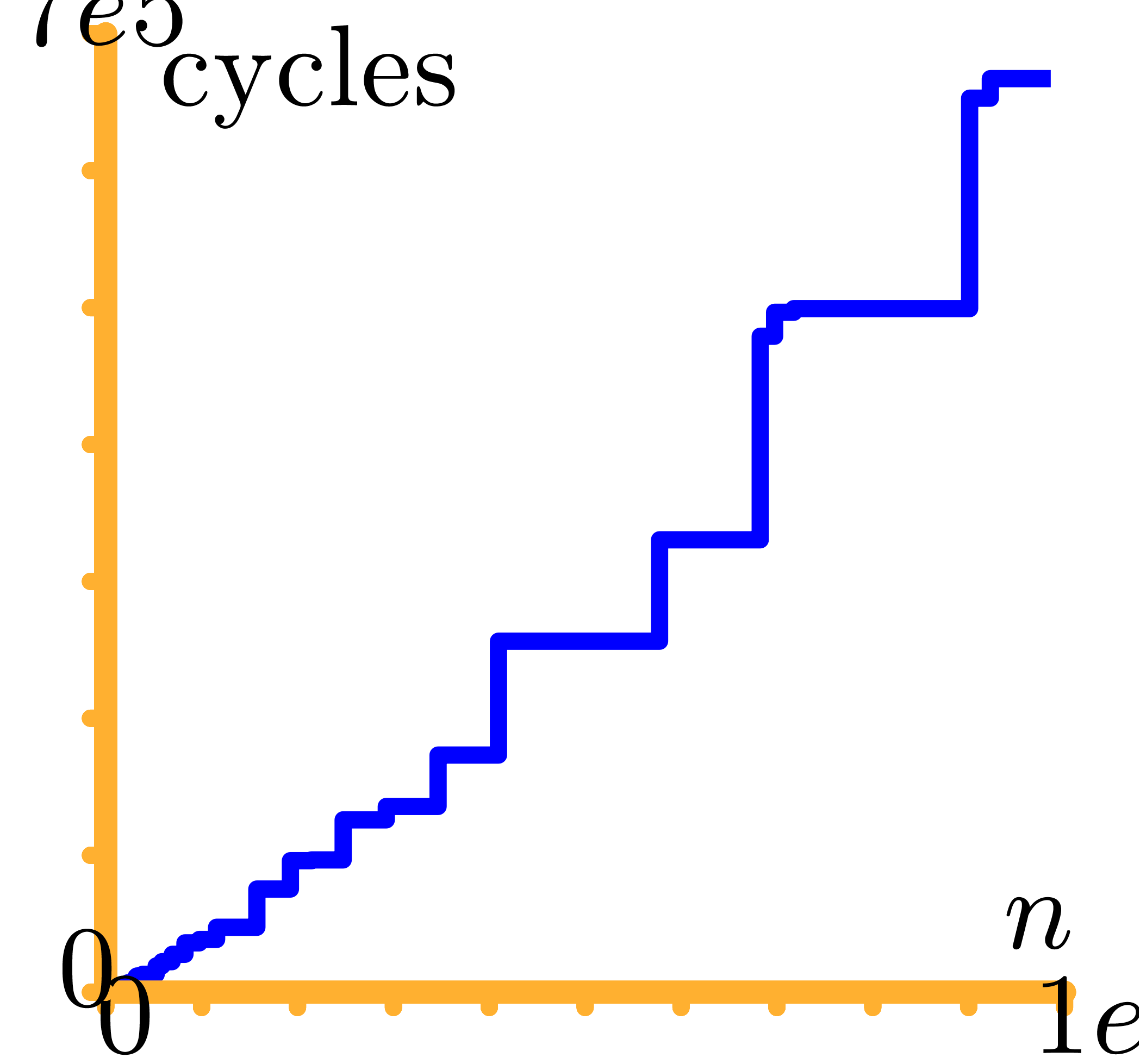
For each size
 ,
we then deduced the smallest DFT size
,
we then deduced the smallest DFT size
 ,
together with the best ordering, leading to the fastest calculation
via
the Good–Thomas algorithm. The graph in Figure
1
represents the number of CPU cycles in terms of
,
together with the best ordering, leading to the fastest calculation
via
the Good–Thomas algorithm. The graph in Figure
1
represents the number of CPU cycles in terms of
 obtained in this way. Thanks to the variety of prime orders, the
staircase effect is softer than with the classical FFT.
obtained in this way. Thanks to the variety of prime orders, the
staircase effect is softer than with the classical FFT.
|
|
Figure 1. Timings for DFT over
, in CPU cycles.
|
For sizes larger than a few thousands, using
internal DFTs of prime size with large strides is of course a bad idea
in terms of memory management. The classical technique, going back to
[16], and now known as the 4-step or
6-step FFT in the literature, consists in decomposing into  such that
and are of order of magnitude
such that
and are of order of magnitude  . In the context of Algorithm 1, with , and ,
we need to determine
. In the context of Algorithm 1, with , and ,
we need to determine  such that
and are the closest to .
such that
and are the closest to .
As previously mentioned, for large values of  , step 1 of Algorithm 1 decomposes into the
transposition of a matrix (in column
representation), followed by in-place DFTs of
size on contiguous data. Then the transposition
is performed backward. In the classical case of the FFT, and are powers of two that satisfy
, step 1 of Algorithm 1 decomposes into the
transposition of a matrix (in column
representation), followed by in-place DFTs of
size on contiguous data. Then the transposition
is performed backward. In the classical case of the FFT, and are powers of two that satisfy
 or
or  ,
and efficient cache-friendly and cache-oblivious solutions are known to
transpose such
,
and efficient cache-friendly and cache-oblivious solutions are known to
transpose such  matrices in-place with AVX2
instructions. Unfortunately, we were not able to do so in our present
situation. Consequently we simply transpose rows in groups of 4 into a
fixed temporary buffer of size
matrices in-place with AVX2
instructions. Unfortunately, we were not able to do so in our present
situation. Consequently we simply transpose rows in groups of 4 into a
fixed temporary buffer of size  .
Then we may perform 4 DFTs of size on contiguous
data, and finally transpose backward. The threshold for our 4-step DFTs
has been estimated in the neighborhood of 7000.
.
Then we may perform 4 DFTs of size on contiguous
data, and finally transpose backward. The threshold for our 4-step DFTs
has been estimated in the neighborhood of 7000.
4.Other ground fields
Usually, fast polynomial multiplication over  is used as the basic building block for other fast polynomial arithmetic
over finite fields in characteristic two. It is natural to ask whether
we may use our fast multiplication over as the
basic building block. Above all, this requires an efficient way to
reduce multiplications in with
is used as the basic building block for other fast polynomial arithmetic
over finite fields in characteristic two. It is natural to ask whether
we may use our fast multiplication over as the
basic building block. Above all, this requires an efficient way to
reduce multiplications in with  to multiplications in
to multiplications in  . The
optimal algorithms vary greatly with .
In this section, we discuss various possible strategies. Timings are
reported for some of them in the next section. In the following
paragraphs,
. The
optimal algorithms vary greatly with .
In this section, we discuss various possible strategies. Timings are
reported for some of them in the next section. In the following
paragraphs,  represent the two polynomials of
degrees
represent the two polynomials of
degrees  to be multiplied, and
to be multiplied, and  is the defining polynomial of over .
is the defining polynomial of over .
4.1Lifting and Kronecker segmentation
Case when  .
In order to multiply two packed polynomials in , we use standard Kronecker segmentation
and cut the input polynomials into slices of 30 bits. More precisely, we
set
.
In order to multiply two packed polynomials in , we use standard Kronecker segmentation
and cut the input polynomials into slices of 30 bits. More precisely, we
set  ,
,  and
and  , so that
, so that  and
and  . The
product then satisfies
. The
product then satisfies  , where
, where  .
We are thus led to multiply
.
We are thus led to multiply  by
by  in by reinterpreting
in by reinterpreting  as
the generator of . In terms
of the input size, this method admits a constant overhead factor of
roughly . In fact, when
considering algorithms with asymptotically softly linear cost, comparing
relative input sizes gives a relevant approximation of the relative
costs.
as
the generator of . In terms
of the input size, this method admits a constant overhead factor of
roughly . In fact, when
considering algorithms with asymptotically softly linear cost, comparing
relative input sizes gives a relevant approximation of the relative
costs.
General strategies. It is well known that one can handle any
value of by reduction to the case  . Basically, is seen as
. Basically, is seen as
 , and a product in is lifted to one product in degree
in
, and a product in is lifted to one product in degree
in  , with coefficients of
degrees
, with coefficients of
degrees  in
in  ,
followed by
,
followed by  divisions by
divisions by  . Then, the Kronecker substitution [14, Chapter 8] reduces the computation of one such product in
, said in bi-degree
. Then, the Kronecker substitution [14, Chapter 8] reduces the computation of one such product in
, said in bi-degree
 , to one product in in degree
, to one product in in degree  . In
total, we obtain a general strategy to reduce one product in degree in to one product in in degree
. In
total, we obtain a general strategy to reduce one product in degree in to one product in in degree  ,
plus
,
plus  bit operations. Roughly speaking, this
approach increases input bit sizes by a factor at most
bit operations. Roughly speaking, this
approach increases input bit sizes by a factor at most  in general, but only when
in general, but only when  .
.
Instead of Kronecker substitution, we may alternatively use classical
evaluation/interpolation schemes [23, Section 2].
Informally speaking, a multiplication in in
degree is still regarded as a multiplication of
 and
and  in
of bi-degrees , but we
“specialize” the variable at
sufficiently many “points” in a suitable ring
in
of bi-degrees , but we
“specialize” the variable at
sufficiently many “points” in a suitable ring  , then perform products in
, then perform products in  of degrees , and finally we
“interpolate” the coefficients of .
of degrees , and finally we
“interpolate” the coefficients of .
The classical Karatsuba transform is such a scheme. For instance, if
then  is sent to
is sent to  , which corresponds to the
projective evaluation at
, which corresponds to the
projective evaluation at  .
The size overhead of this reduction is ,
but its advantage to the preceding general strategy is the splitting of
the initial product into smaller independent products. The Karatsuba
transform can be iterated, and even Toom–Cook transforms of [3] might be used to handle small values of .
.
The size overhead of this reduction is ,
but its advantage to the preceding general strategy is the splitting of
the initial product into smaller independent products. The Karatsuba
transform can be iterated, and even Toom–Cook transforms of [3] might be used to handle small values of .
Another standard evaluation scheme concerns the case when is sufficiently large. Each coefficient  of
of  is “evaluated” via one
DFT of size
is “evaluated” via one
DFT of size  applied to the Kronecker
segmentation of into slices of 30 bits seen in
applied to the Kronecker
segmentation of into slices of 30 bits seen in
 . Then we perform products in in degree , and “interpolate” the output
coefficients by means of inverse DFTs. Asymptotically, the size overhead
is again .
. Then we perform products in in degree , and “interpolate” the output
coefficients by means of inverse DFTs. Asymptotically, the size overhead
is again .
The rest of this section is devoted to other reduction strategies
involving a size growth less than 4 in various particular cases.
4.2Field embedding
Case when  When
When  and
and  , which
corresponds to
, which
corresponds to  , we may embed
into ,
by regarding as a field extension of . The input polynomials are now cut
into slices of degrees
, we may embed
into ,
by regarding as a field extension of . The input polynomials are now cut
into slices of degrees  with
with  . The overhead of this method is asymptotically
. The overhead of this method is asymptotically
 . If
. If  , then
, then  is odd,
is odd,  , and the overhead is
, and the overhead is  . In particular it is only
. In particular it is only  for
for  .
.
Let  be an irreducible factor of
in , of degree . Elements of can thus
be represented by polynomials of degrees
be an irreducible factor of
in , of degree . Elements of can thus
be represented by polynomials of degrees  in
in
 , modulo , via the following isomorphism
, modulo , via the following isomorphism

where  represents the canonical preimage of in
represents the canonical preimage of in  . Let
. Let
 be a polynomial of bi-degree
be a polynomial of bi-degree  representing an element of ,
obtained as a slice of or . The image
representing an element of ,
obtained as a slice of or . The image  can be obtained
as
can be obtained
as  . Consequently, if we
pre-compute
. Consequently, if we
pre-compute  for all
for all  and
and
 , then deducing requires 59 sums in
, then deducing requires 59 sums in  .
.
The number of sums may be decreased by using larger look-up tables. Let
 represent the basis
represent the basis  for
and ,
whatever the order is. Then all the
for
and ,
whatever the order is. Then all the  for
for  can be stored in 10 look-up tables of size 64, which
allows to be computed using 9 sums. Of course
the cost for reordering and packing bits of elements of
must be taken into account, and sizes of look-up tables must be
carefully adjusted in terms of .
The details are omitted.
can be stored in 10 look-up tables of size 64, which
allows to be computed using 9 sums. Of course
the cost for reordering and packing bits of elements of
must be taken into account, and sizes of look-up tables must be
carefully adjusted in terms of .
The details are omitted.
Conversely, let  . We wish to
compute
. We wish to
compute  . As for direct
images of
. As for direct
images of  , we may
pre-compute
, we may
pre-compute  for all
for all  and
reduce the computation of to
sums in
and
reduce the computation of to
sums in  . Larger look-up
tables can again help to reduce the number of sums.
. Larger look-up
tables can again help to reduce the number of sums.
Let us mention that the use of look-up tables cannot benefit from SIMD
technologies. On the current platform this is not yet a problem: fully
vectorized arithmetic in  would also require SIMD
versions of carry-less multiplication which are not available at
present.
would also require SIMD
versions of carry-less multiplication which are not available at
present.
Case when  . We may
combine the previous strategies when is not
coprime with . Let
. We may
combine the previous strategies when is not
coprime with . Let  . We rewrite elements of into polynomials in
. We rewrite elements of into polynomials in  of bi-degrees
of bi-degrees
 , and then use the Kronecker
substitution to reduce to one product in
, and then use the Kronecker
substitution to reduce to one product in  in
degree
in
degree  . For example, when
. For example, when
 , elements of may be represented by polynomials in . We are thus led to multiplying polynomials in
, elements of may be represented by polynomials in . We are thus led to multiplying polynomials in
 in bi-degree
in bi-degree  ,
which yields an overhead of .
Another favorable case is when
,
which yields an overhead of .
Another favorable case is when  ,
yielding an overhead of .
,
yielding an overhead of .
4.3Double-lifting
When  , we may of
course directly lift products in to products in
of output degree in at
most
, we may of
course directly lift products in to products in
of output degree in at
most  . The latter products
may thus be computed as products in .
This strategy has an overhead of ,
so it outperforms the general strategies for
. The latter products
may thus be computed as products in .
This strategy has an overhead of ,
so it outperforms the general strategies for  .
.
For  , we lift products to and multiply in
, we lift products to and multiply in  and
and  . We then perform Chinese remaindering to
deduce the product modulo
. We then perform Chinese remaindering to
deduce the product modulo  .
.
Multiplying and in  may be obtained as
may be obtained as  .
In this way all relies on the same DFT routines over .
.
In this way all relies on the same DFT routines over .
If  has degree
has degree  ,
with
,
with  a power of ,
we decompose
a power of ,
we decompose  with
with  and
and
 of degrees
of degrees  ,
then
,
then  is obtained efficiently by the following
induction:
is obtained efficiently by the following
induction:
Chinese remaindering can also be done efficiently. Let  be the inverse of
be the inverse of  modulo
modulo  . Residues
. Residues  and
and  then lift into
then lift into  modulo . Since
modulo . Since  ,
this formula involves only one carry-less product. Asymptotically, the
overhead of this method is
,
this formula involves only one carry-less product. Asymptotically, the
overhead of this method is  .
.
On our platform, formula (3) may be
implemented in degree as follows. Assume that
xmm0 contains  ,
xmm1 contains
,
xmm1 contains  ,
xmm2 contains 11110000…11110000,
,
xmm2 contains 11110000…11110000,
 , and xmm5 is
filled with 11…1100…00. Then, using xmm15 for input and output, we simply do
, and xmm5 is
filled with 11…1100…00. Then, using xmm15 for input and output, we simply do
vpand xmm14, xmm15, xmm0
vpsrlq xmm14, xmm14, 1
vpxor xmm15, xmm14, xmm15
vpand xmm14, xmm15, xmm1
vpsrlq xmm14, xmm14, 2
vpxor xmm15, xmm14, xmm15
…
vpand xmm14, xmm15, xmm5
vpsrlq xmm14, xmm14, 32
vpxor xmm15, xmm14, xmm15
4.4The Crandall–Fagin reduction
For “lucky”  such that
such that  is irreducible over ,
multiplication in reduces to cyclic
multiplication over of length
is irreducible over ,
multiplication in reduces to cyclic
multiplication over of length  . Using our adaptation [21] of
Crandall–Fagin's algorithm [6], multiplying two
polynomials of degrees in
therefore reduces to one product in
. Using our adaptation [21] of
Crandall–Fagin's algorithm [6], multiplying two
polynomials of degrees in
therefore reduces to one product in  in degree
, where
is the first integer such that
in degree
, where
is the first integer such that  .
The asymptotic overhead of this method is
.
The asymptotic overhead of this method is  .
This strategy generalizes to the case when
.
This strategy generalizes to the case when  divides
divides  , with
, with  .
.
For various  , the polynomial
factors into
, the polynomial
factors into  irreducible
polynomials of degree
irreducible
polynomials of degree  . In
that case, we may use the previous strategy to reduce
products in
. In
that case, we may use the previous strategy to reduce
products in  to multiplications in , using different
defining polynomials of
to multiplications in , using different
defining polynomials of  .
Asymptotically, the overhead reaches again ,
although working with different defining polynomials of
probably involves another non trivial overhead in practice. Again, the
strategy generalizes to the case when admits
irreducible factors of degree
.
Asymptotically, the overhead reaches again ,
although working with different defining polynomials of
probably involves another non trivial overhead in practice. Again, the
strategy generalizes to the case when admits
irreducible factors of degree  with
with  .
.
5.Timings
Our polynomial products are implemented in the Justinline
library of Mathemagix. The source code is freely
available from revision  of our SVN server (http://gforge.inria.fr/projects/mmx/). Sources
for DFTs over are in the file
of our SVN server (http://gforge.inria.fr/projects/mmx/). Sources
for DFTs over are in the file  . Those for our polynomial products in are in polynomial_f2k_amd64_avx_clmul.mmx.
Let us recall here that Mathemagix functions can
also be easily exported to C++ [24].
. Those for our polynomial products in are in polynomial_f2k_amd64_avx_clmul.mmx.
Let us recall here that Mathemagix functions can
also be easily exported to C++ [24].
We use version 1.1 of the gf2x library, tuned to
our platform during installation. The top level function, named gf2x_mul, multiplies packed polynomials in , and makes use of the carry-less product
instruction. Triadic variants of the Schönhage–Strassen
algorithm start to be used from degree  .
gf2x can be used from versions
.
gf2x can be used from versions  of the NTL library [34], that uses Kronecker substitution
to multiply in .
Consequently, we do not need to compare to NTL. We also compare to FLINT
2.5.2, tuned according to §13 of the documentation.
of the NTL library [34], that uses Kronecker substitution
to multiply in .
Consequently, we do not need to compare to NTL. We also compare to FLINT
2.5.2, tuned according to §13 of the documentation.
5.1 and
Table
1
displays timings for multiplying polynomials of degrees
in
.
The row “us” concerns the natural product
via
DFTs, the other row is the running time of
gf2x_mul
used to multiply polynomials in
built from Kronecker substitution.
In Table 2, we report on timings for multiplying
polynomials of degrees in . The row “us” concerns our DFT based
implementation via Kronecker segmentation, as recalled in
Section 4.1. The row gf2x is the
running time for the direct call to gf2x_mul. The row
FLINT concerns the performance of the function nmod_poly_mul,
which reduces to products in  via
Kronecker substitution. Since the packed representation is not
implemented, we could not obtain timings until the end. This comparison
is not intended to be fair, but rather to show unfamiliar readers why
dedicated algorithms for may be worth it.
via
Kronecker substitution. Since the packed representation is not
implemented, we could not obtain timings until the end. This comparison
is not intended to be fair, but rather to show unfamiliar readers why
dedicated algorithms for may be worth it.
In both cases, our DFT based products turn out to be more efficient than
the triadic version of the Schönhage–Strassen of gf2x, for large degrees. One major advantage of the DFT
based approach concerns linear algebra. Instead of multiplying  matrices over naively in time
matrices over naively in time
 , we compute the
, we compute the  DFTs and
DFTs and  products of matrices over ,
in time
products of matrices over ,
in time  . Matrix
multiplication over is reduced to matrix
multiplication over using similar techniques as
in Section 4. Timings for matrices over , reported in Table 3, confirm the
practical gain.
. Matrix
multiplication over is reduced to matrix
multiplication over using similar techniques as
in Section 4. Timings for matrices over , reported in Table 3, confirm the
practical gain.
5.2 and
and 
Table 4 displays timings for multiplying polynomials of
degrees in .
The row “us” concerns the double-lifting strategy
of Section 4.3. The next row is the running time of gf2x_mul used to multiply polynomials in
built from Kronecker substitution. As expected, timings for gf2x are similar to those of Table 1, and
the overhead with respect to is close to . Overall, our implementation is
about twice as fast than via gf2x.
Table 5 finally concerns our implementation of the strategy
from Section 4.2 for products in degree
in . As expected, timings are
similar to those of Table 2 when input sizes are the same.
We compare to the sole time needed by gf2x_mul used as
follows: we rewrite the product in into a
product in  , which then
reduces to products in
in degrees
, which then
reduces to products in
in degrees  thanks to Karatsuba's formula.
thanks to Karatsuba's formula.
6.Conclusion
We are pleased to observe that key ideas from [20, 21]
turn out to be of practical interest even for polynomials in of medium sizes. Besides
Schönhage–Strassen-type algorithms, other strategies such as
the additive Fourier transform have been developed for [13, 27], and it would be
worth experimenting them carefully in practice.
Let us mention a few plans for future improvements. First, vectorizing
our code should lead to a significant speed-up. However, in our
implementation of multiplication in ,
we noticed that about the third of the time is spent in carry-less
products. Since vpclmulqdq does not admit a genuine
vectorized counterpart over 256-bit registers, we cannot hope for a
speed-up of two by fully exploiting the AVX-256 mode. Then, the graph
from Figure 1 can probably be further smoothed by adapting
the truncated Fourier transform algorithm [22]. We are also
investigating further accelerations of DFTs of prime orders in Section
3.3. For instance, for  and
and  , we might exploit the
factorization
, we might exploit the
factorization  in order to compute cyclic
products using Chinese remaindering. In the longer run, we finally
expect the approach in this paper to be generalizable to finite fields
of higher characteristic
in order to compute cyclic
products using Chinese remaindering. In the longer run, we finally
expect the approach in this paper to be generalizable to finite fields
of higher characteristic 
7.References
-
[1]
-
S. Ballet and J. Pieltant. On the tensor rank of
multiplication in any extension of  . J. Complexity,
27(2):230–245, 2011.
. J. Complexity,
27(2):230–245, 2011.
-
[2]
-
L. I. Bluestein. A linear filtering approach to the
computation of discrete Fourier transform. IEEE
Transactions on Audio and Electroacoustics,
18(4):451–455, 1970.
-
[3]
-
M. Bodrato. Towards optimal Toom-Cook
multiplication for univariate and multivariate polynomials in
characteristic 2 and 0. In C. Carlet and B. Sunar, editors,
Arithmetic of Finite Fields, volume 4547 of Lect.
Notes Comput. Sci., pages 116–133. Springer Berlin
Heidelberg, 2007.
-
[4]
-
R. P. Brent, P. Gaudry, E. Thomé, and P.
Zimmermann. Faster multiplication in GF . In A. van der Poorten and A. Stein,
editors, Algorithmic Number Theory, volume 5011 of
Lect. Notes Comput. Sci., pages 153–166. Springer
Berlin Heidelberg, 2008.
. In A. van der Poorten and A. Stein,
editors, Algorithmic Number Theory, volume 5011 of
Lect. Notes Comput. Sci., pages 153–166. Springer
Berlin Heidelberg, 2008.
-
[5]
-
J. W. Cooley and J. W. Tukey. An algorithm for the
machine calculation of complex Fourier series. Math.
Computat., 19:297–301, 1965.
-
[6]
-
R. Crandall and B. Fagin. Discrete weighted
transforms and large-integer arithmetic. Math. Comp.,
62(205):305–324, 1994.
-
[7]
-
A. De, P. P. Kurur, C. Saha, and R. Saptharishi.
Fast integer multiplication using modular arithmetic. SIAM
J. Comput., 42(2):685–699, 2013.
-
[8]
-
P. Duhamel and M. Vetterli. Fast Fourier
transforms: A tutorial review and a state of the art.
Signal Processing, 19(4):259–299, 1990.
-
[9]
-
A. Fog. Instruction tables. Lists of instruction
latencies, throughputs and micro-operation breakdowns for
Intel, AMD and VIA CPUs. Number 4 in Optimization manuals.
http://www.agner.org, Technical
University of Denmark, 1996–2016.
-
[10]
-
M. Frigo and S. G. Johnson. The design and
implementation of FFTW3. Proc. IEEE,
93(2):216–231, 2005.
-
[11]
-
M. Fürer. Faster integer multiplication. In
Proceedings of the Thirty-Ninth ACM Symposium on Theory of
Computing, STOC 2007, pages 57–66, New York, NY,
USA, 2007. ACM Press.
-
[12]
-
M. Fürer. Faster integer multiplication.
SIAM J. Comp., 39(3):979–1005, 2009.
-
[13]
-
S. Gao and T. Mateer. Additive fast Fourier
transforms over finite fields. IEEE Trans. Inform.
Theory, 56(12):6265–6272, 2010.
-
[14]
-
J. von zur Gathen and J. Gerhard. Modern
computer algebra. Cambridge University Press, second
edition, 2003.
-
[15]
-
GCC, the GNU Compiler Collection. Software
available at http://gcc.gnu.org, from
1987.
-
[16]
-
W. M. Gentleman and G. Sande. Fast Fourier
transforms: For fun and profit. In Proceedings of the
November 7-10, 1966, Fall Joint Computer Conference, AFIPS
'66 (Fall), pages 563–578. ACM Press, 1966.
-
[17]
-
I. J. Good. The interaction algorithm and practical
Fourier analysis. J. R. Stat. Soc. Ser. B,
20(2):361–372, 1958.
-
[18]
-
T. Granlund et al. GMP, the GNU multiple precision
arithmetic library. http://gmplib.org,
from 1991.
-
[19]
-
W. Hart et al. FLINT: Fast Library for Number
Theory. http://www.flintlib.org, from
2008.
-
[20]
-
D. Harvey, J. van der Hoeven, and G. Lecerf. Even
faster integer multiplication. http://arxiv.org/abs/1407.3360,
2014.
-
[21]
-
D. Harvey, J. van der Hoeven, and G. Lecerf. Faster
polynomial multiplication over finite fields. http://arxiv.org/abs/1407.3361,
2014.
-
[22]
-
J. van der Hoeven. The truncated Fourier transform
and applications. In J. Schicho, editor, Proceedings of the
2004 International Symposium on Symbolic and Algebraic
Computation, ISSAC '04, pages 290–296. ACM Press,
2004.
-
[23]
-
J. van der Hoeven. Newton's method and FFT trading.
J. Symbolic Comput., 45(8):857–878, 2010.
-
[24]
-
J. van der Hoeven and G. Lecerf. Interfacing
Mathemagix with C++. In M. Monagan, G. Cooperman, and M.
Giesbrecht, editors, Proceedings of the 2013 ACM on
International Symposium on Symbolic and Algebraic
Computation, ISSAC '13, pages 363–370. ACM Press,
2013.
-
[25]
-
J. van der Hoeven, G. Lecerf, and G. Quintin.
Modular SIMD arithmetic in Mathemagix. http://hal.archives-ouvertes.fr/hal-01022383,
2014.
-
[26]
-
Intel Corporation, 2200 Mission College Blvd.,
Santa Clara, CA 95052-8119, USA. Intel (R) Architecture
Instruction Set Extensions Programming Reference, 2015.
Ref. 319433-023, http://software.intel.com.
-
[27]
-
Sian-Jheng Lin, Wei-Ho Chung, and S. Yunghsiang
Han. Novel polynomial basis and its application to
Reed-Solomon erasure codes. In 2014 IEEE 55th Annual
Symposium on Foundations of Computer Science (FOCS), pages
316–325. IEEE, 2014.
-
[28]
-
C. Lüders. Implementation of the DKSS
algorithm for multiplication of large numbers. In
Proceedings of the 2015 ACM on International Symposium on
Symbolic and Algebraic Computation, ISSAC '15, pages
267–274. ACM Press, 2015.
-
[29]
-
L. Meng and J. Johnson. High performance
implementation of the TFT. In K. Nabeshima, editor,
Proceedings of the 39th International Symposium on Symbolic
and Algebraic Computation, ISSAC '14, pages 328–334.
ACM, 2014.
-
[30]
-
J. M. Pollard. The fast Fourier transform in a
finite field. Math. Comp., 25(114):365–374, 1971.
-
[31]
-
C. M. Rader. Discrete Fourier transforms when the
number of data samples is prime. Proc. IEEE,
56(6):1107–1108, 1968.
-
[32]
-
A. Schönhage. Schnelle Multiplikation von
Polynomen über Körpern der Charakteristik 2. Acta
Infor., 7(4):395–398, 1977.
-
[33]
-
A. Schönhage and V. Strassen. Schnelle
Multiplikation großer Zahlen. Computing,
7:281–292, 1971.
-
[34]
-
V. Shoup. NTL: A Library for doing Number
Theory, 2015. Software, version 9.6.2. http://www.shoup.net.
-
[35]
-
L. H. Thomas. Using a computer to solve problems in
physics. In W. F. Freiberger and W. Prager, editors,
Applications of digital computers, pages 42–57.
Boston, Ginn, 1963.
-
[36]
-
S. Winograd. On computing the discrete Fourier
transform. Math. Comp., 32:175–199, 1978.
 ,
, .
. ,
, do
do


 by
by 


 for all
for all 


 in
in 
 matrices over
matrices over  ,
,
 ,
,