Reliable homotopy continuation |
| Preliminary version |
|
| November 29, 2011 |
|
 . This work has
been supported by the ANR-09-JCJC-0098-01
. This work has
been supported by the ANR-09-JCJC-0098-01
In this paper, we present several algorithms for certified homotopy continuation. One typical application is to compute the roots of a zero dimensional system of polynomial equations. We both present algorithms for the certification of single and multiple roots. We also present several ideas for improving the underlying numerical path tracking algorithms, especially in the case of multiple roots.
|
Disclaimer. This paper is a preliminary version,
which is mainly intended as a working program for an ongoing
implementation in the
Besides Gröbner basis computations, homotopy methods are a popular technique for solving systems of polynomial equations. In this paper, we will only consider zero dimensional systems. Given such a system
with  and
and  ,
the idea is to find a suitable starting system
,
the idea is to find a suitable starting system
of which all solutions are known, to introduce the homotopy
and to compute the solutions to  by following the
solutions of
by following the
solutions of  from
from  to
to
 . Two main approaches exist:
. Two main approaches exist:
In this setting, the polynomial equations have exact rational or
algebraic coefficients. The homotopy continuation is done exactly
using suitable resultants. At the end of the homotopy, the
solutions of the system are again given
exactly, as the solutions of simpler systems. The theory was
developed in [GHMP95, GHH+97, Dur08]
and a concrete implementation is available in the
An alternative approach is to follow the solution paths using a numeric path tracking algorithm; see [Mor87, Ver96, SW05] and references therein. This approach is usually faster, partly because most of the operations can be done at a significantly lower precision. However, the end result is only approximate. In particular, it cannot be used for the reliable resolution of overdetermined systems. Several implementations exist for numeric path tracking [Ver99, BHSW06, Ley09].
It is surprising that little effort has been undertaken so far in order
to bring both approaches closer together. Particularly interesting
challenges are how to make numeric homotopy as reliable as possible and
how to reconstruct exact end results from the numeric output. Part of
this situation might be due to the fact that interval analysis [Moo66,
AH83, Neu90, JKDW01, Kul08,
MKC09, Rum10] is not so well-known in the
communities where homotopy methods were developed, with the exception of
one early paper [Kea94]. The main objective paper is to
systematically exploit interval analysis techniques in the context of
homotopy continuation. We will show how to certify homotopy
continuations as well as single and multiple solutions of the polynomial
system .
Section 3 is devoted to preliminaries from the area of reliable computation. In section 3.1, we start by recalling the basic principles of ball arithmetic [vdH09], which is a more suitable variant of interval arithmetic for our purposes. In section 3.2, we pursue by recalling the concept of a Taylor model [MB96, MB04], which is useful in order to compute with reliable enclosures of multivariate analytic functions on polydisks. We also introduce a variant of Taylors models in section 3.3, which simultaneously encloses an analytic function and a finite number of its derivatives. In sections 3.4 and 3.5, we discuss the well known problem of overestimation which is inherent to ball arithmetic. We will provide some techniques to analyze, quantify and reduce overestimation.
Before attacking the topic of certified path tracking, it is useful to
review the theory of numeric path tracking first. In section 4,
we start with the case of non singular paths, in which case we use a
classical predictor corrector approach based on Euler-Newton's method.
The goal of a numeric path tracker is to advance as fast as possible on
the solution path while minimizing the risk of errors. Clearly, the
working precision has to be sufficiently large in order to ensure that
function evaluations are reasonably accurate. In section 4.4,
we show how to find a suitable working precision using ball arithmetic.
We consider this approach to be simpler, more robust and more general
than the one proposed in [BSHW08]. In order to reduce the
risk of jumping from one path to another path, we also need a criterion
for checking whether our numeric approximations stay reasonably close to
the true solution path. A numerically robust way to do this is to ensure
that the Jacobian of  does not change to rapidly
during each step; see section 4.5 and [BSHW08]
for a related approach. Another technique is to detect near collisions
of paths and undertake special action in this case; see section 4.6.
does not change to rapidly
during each step; see section 4.5 and [BSHW08]
for a related approach. Another technique is to detect near collisions
of paths and undertake special action in this case; see section 4.6.
In section 5, we turn our attention to homotopies (3)
such that the end system (1) admits multiple solutions. We
will see that Euler-Newton iterations only admit a linear convergence
near multiple solutions. Therefore, it is useful to search for
alternative iterations which admit a better convergence. Now the
solution path near a multiple solution is given by a convergent Puiseux
series in  . When letting
. When letting  turn around the origin, we thus fall on another
solution path. The collection of paths which are obtained through
repeated rotations of this kind is called a herd. In sections 5.2
and 5.3, we will describe a new path tracking method with
quadratic convergence, which operates simultaneously on all paths in a
herd. The remaining issue of how to detect clusters and herds will be
described in sections 5.4, 5.5 and 5.6.
turn around the origin, we thus fall on another
solution path. The collection of paths which are obtained through
repeated rotations of this kind is called a herd. In sections 5.2
and 5.3, we will describe a new path tracking method with
quadratic convergence, which operates simultaneously on all paths in a
herd. The remaining issue of how to detect clusters and herds will be
described in sections 5.4, 5.5 and 5.6.
In section 6, we turn our attention to the certification of single roots of (1) and single steps of a path tracker. An efficient and robust method for the certification of solutions to systems of non linear equations is Krawczyk's method [Kra69], with several improvements by Rump [Rum80]. In section 6.1, we adapt this classical method to the setting of ball arithmetic. In section 6.2, we will see that an easy generalization of this method provides an algorithm for certified path tracking. An alternative such algorithm was given in [Kea94], but the present algorithm presents similar advantages as Krawczyk's method with respect to other methods for the certification of solutions to systems of non linear equations. However, both methods still suffer from overestimation due to the fact that error bounds are computed on a polydisk which contains the solution path. Using the technique of Taylor models, we will show in section 6.3 that it possible to compute the error bounds in small tubes around the actual solution path, thereby reducing the problem of overestimation.
In the last section, we consider the more difficult problem of
certifying multiple roots. Deflation is a classical technique in order
to solve this difficulty. However, deflation usually requires the
computation of a large number of derivatives of the system, which
becomes prohibitive for large clusters of solutions. Notice that
solutions which tend to infinity should also be considered as being part
of one or more large clusters if we want to compute all
solutions to (1). Our certification strategy is again based
on the simultaneous consideration of all solution paths in a herd. In
sections 7.2 and 7.3, we will show that a herd
of solution paths can be considered as a single isolated solution path
of a new “suitable fattened” system of equations. From the
complexity point of view, if the herd contains  paths, then the evaluation of the fattened system is only times more expensive than the evaluation of the original
system, up to logarithmic factors. Moreover, a single large cluster
often contains many different herds, which can be considered separately
for our technique. This is particularly useful for the separation of the
various paths which tend to infinity. In section 7.4, we
will show how to certify the global set of solutions to the system
paths, then the evaluation of the fattened system is only times more expensive than the evaluation of the original
system, up to logarithmic factors. Moreover, a single large cluster
often contains many different herds, which can be considered separately
for our technique. This is particularly useful for the separation of the
various paths which tend to infinity. In section 7.4, we
will show how to certify the global set of solutions to the system  and how to reconstruct equations for the exact
solutions.
and how to reconstruct equations for the exact
solutions.
 , we denote
, we denote

 -norm
for vectors
-norm
for vectors  :
:
This norm should not be confused with taking componentwise absolute values

For  we also define
we also define

If  are formal variables, then we write
are formal variables, then we write

 for the set of
for the set of  matrices over a set
matrices over a set  . The
matrix norm of a matrix
. The
matrix norm of a matrix  corresponding to the
-norm (4) for
vectors
corresponding to the
-norm (4) for
vectors
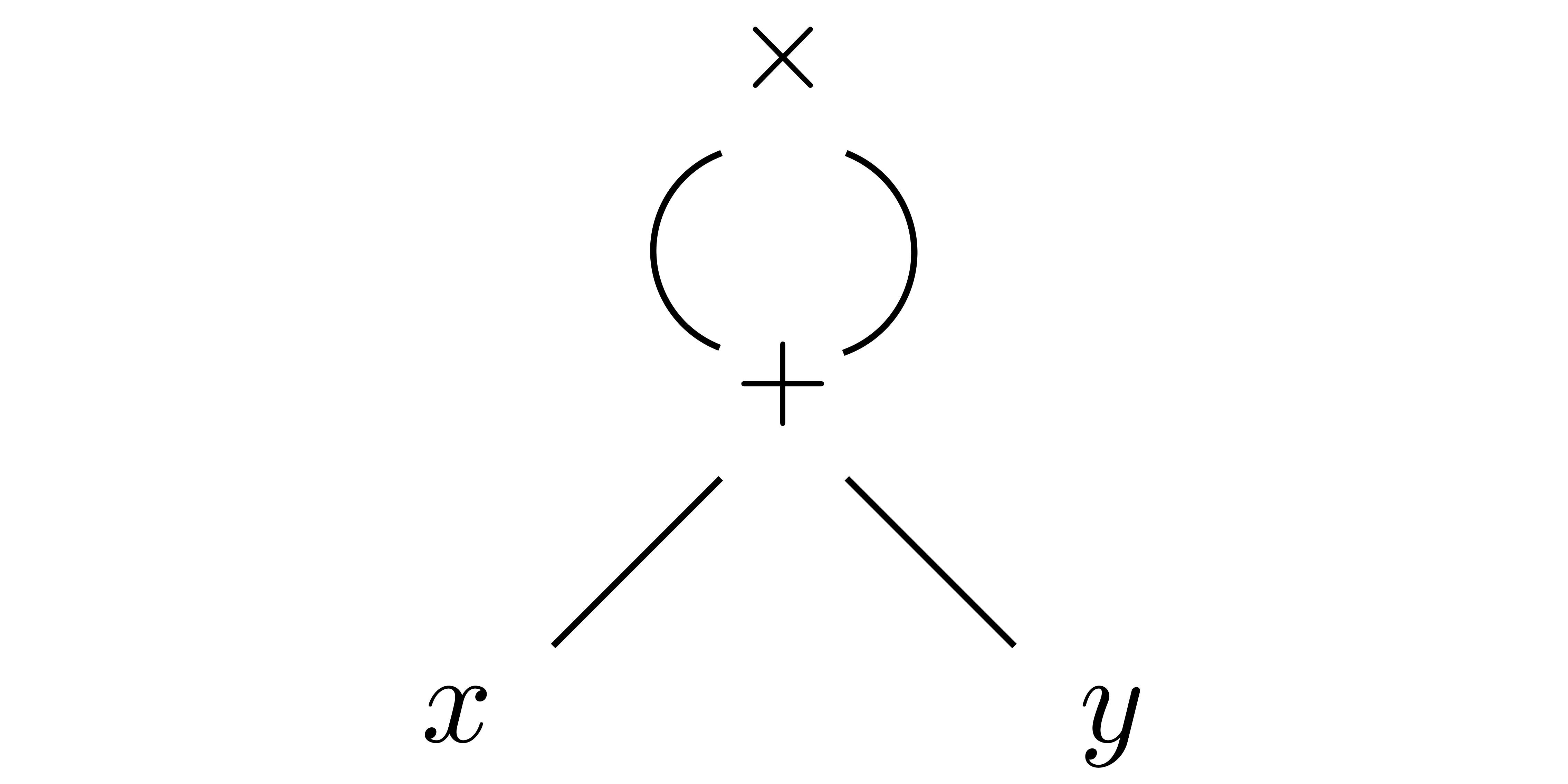
is a typical dag for the expression  .
We will denote by
.
We will denote by  the size of a dag
the size of a dag  . For instance, the size of the above dag is
. For instance, the size of the above dag is
 .
.
Let us briefly recall the principles behind ball arithmetic. Given a
normed vector space , we will
denote by  or
or  the set of
closed balls with centers in and radii in
the set of
closed balls with centers in and radii in  . Given such a ball
. Given such a ball  , we will denote its center by
, we will denote its center by  and its radius by
and its radius by  .
Conversely, given
.
Conversely, given  and
and  , we will denote by
, we will denote by  the
closed ball with center
the
closed ball with center  and radius .
and radius .
A continuous operation  is said to lift
into an operation
is said to lift
into an operation  on balls, which is usually
also denoted by , if the
inclusion property
on balls, which is usually
also denoted by , if the
inclusion property
is satisfied for any  and
and  . We also say that
. We also say that  is an
enclosure for the set
is an
enclosure for the set  ,
whenever (5) holds. For instance, if
is a Banach algebra, then we may take
,
whenever (5) holds. For instance, if
is a Banach algebra, then we may take

Similar formulas can be given for division and elementary functions.
Certified upper and lower bounds for  will be
denoted by
will be
denoted by  and
and  .
.
It is convenient to extend the notion of a ball to more general radius
types, which only carry a partial ordering. This allows us for instance
to regard a vector  of balls as a
“vectorial ball” with center
of balls as a
“vectorial ball” with center  and
radius
and
radius  . If
. If  , then we write
, then we write  if and
only if
if and
only if  for all
for all  .
A similar remark holds for matrices and power series with ball
coefficients.
.
A similar remark holds for matrices and power series with ball
coefficients.
In concrete machine computations, numbers are usually approximated by
floating point numbers with a finite precision. Let  be the set of floating point numbers at a given working precision, which
we will assume fixed. It is customary to include the infinities
be the set of floating point numbers at a given working precision, which
we will assume fixed. It is customary to include the infinities  in as well. The IEEE754
standard [ANS08] specifies how to perform basic arithmetic
with floating point numbers in a predictable way, by specifying a
rounding mode
in as well. The IEEE754
standard [ANS08] specifies how to perform basic arithmetic
with floating point numbers in a predictable way, by specifying a
rounding mode  among “down”,
“up” and “nearest”. A multiple precision
implementation of this standard is available in the
among “down”,
“up” and “nearest”. A multiple precision
implementation of this standard is available in the  , we will denote by
, we will denote by  its
approximation using floating pointing arithmetic with rounding mode
its
approximation using floating pointing arithmetic with rounding mode
 . This notation extends to
the case when
. This notation extends to
the case when  and are
replaced by their complexifications
and are
replaced by their complexifications  and
and  .
.
Let  and
and  or
or  and
and  . We will
denote by
. We will
denote by  or
or  the set of
closed balls in with centers in
the set of
closed balls in with centers in  and radii in
and radii in  . In this case,
we will also allow for balls with an infinite radius. A continuous
operation is again said to lift to an
operation
. In this case,
we will also allow for balls with an infinite radius. A continuous
operation is again said to lift to an
operation  on balls if (5) holds for
any
on balls if (5) holds for
any  and .
The formulas for the ring operations may now be adapted to
and .
The formulas for the ring operations may now be adapted to

where  ,
,  and
and  are reliable bounds for the rounding errors
induced by the corresponding floating point operations on the centers;
see [vdH09] for more details.
are reliable bounds for the rounding errors
induced by the corresponding floating point operations on the centers;
see [vdH09] for more details.
In order to ease the remainder of our exposition, we will avoid
technicalities related to rounding problems, and compute with
“idealized” balls with centers in  and radii in . For those who
are familiar with rounding errors, it should not be difficult though to
adapt our results to more realistic machine computations.
and radii in . For those who
are familiar with rounding errors, it should not be difficult though to
adapt our results to more realistic machine computations.
Remark are sometimes required to satisfy the inclusion
monotonicity property

for all  , which clearly
implies the usual inclusion property (5). For floating
intervals, it is easy to ensure this stronger property using correct
rounding. In the ball setting, the exact ring operations in
, which clearly
implies the usual inclusion property (5). For floating
intervals, it is easy to ensure this stronger property using correct
rounding. In the ball setting, the exact ring operations in  and
and  are clearly inclusion
monotonic, but it seems cumbersome to preserve this stronger property
for floating balls. For this reason, we systematically develop our
theory without assuming inclusion monotonicity.
are clearly inclusion
monotonic, but it seems cumbersome to preserve this stronger property
for floating balls. For this reason, we systematically develop our
theory without assuming inclusion monotonicity.
If we are computing with analytic functions on a disk, or multivariate
analytic functions on a polydisk, then Taylor models [MB96,
MB04] provide a suitable functional analogue for ball
arithmetic. We will use a multivariate setup with  as our coordinates and a polydisk
as our coordinates and a polydisk  for a fixed
for a fixed
 . Taylor models come in
different blends, depending on whether we use a global error bound on
. Taylor models come in
different blends, depending on whether we use a global error bound on
 or individual bounds for the coefficients of the
polynomial approximation. Individual bounds are sharper (especially if
we truncate up to an small order such that the remainder is not that
small), but more expensive to compute. Our general setup covers all
possible blends of Taylor models.
or individual bounds for the coefficients of the
polynomial approximation. Individual bounds are sharper (especially if
we truncate up to an small order such that the remainder is not that
small), but more expensive to compute. Our general setup covers all
possible blends of Taylor models.
We first need some more definitions and notations. Assume that  is given the natural partial ordering. Let
is given the natural partial ordering. Let  denote the
denote the  -th
canonical basis vector of ,
so that
-th
canonical basis vector of ,
so that  and
and  for
for  . For every
. For every  , recall that
, recall that  .
A subset
.
A subset  is called an initial segment,
if for any
is called an initial segment,
if for any  and
and  with
with
 , we have
, we have  . In that case, we write
. In that case, we write  and
and  . In what follows, we
assume that
. In what follows, we
assume that  and
and  are
fixed initial segments of with
are
fixed initial segments of with  . For instance, we may take
. For instance, we may take  and
and  or
or  or
or  .
.
Let or .
Given a series  , we will
write
, we will
write  for its support. Given a subset
for its support. Given a subset
 and a subset
and a subset  ,
we write
,
we write  and
and  .
If is analytic on ,
then we denote its sup-norm by
.
If is analytic on ,
then we denote its sup-norm by

A Taylor model is a tuple  ,
where
,
where  ,
and are as above,
,
and are as above,  and
and
 . We will write
. We will write  for the set of such Taylor models. Given
for the set of such Taylor models. Given  and , we will also denote
and , we will also denote
 and
and  .
Given an analytic function on , we write
.
Given an analytic function on , we write  ,
if there exists a decomposition
,
if there exists a decomposition

with  and
and  for all
for all  . In particular, if , then
. In particular, if , then

for any  . Given two Taylor
models
. Given two Taylor
models  , we will say that
, we will say that
 is included in
is included in  , and we write
, and we write  if
if  for any . This
holds in particular if
for any . This
holds in particular if  for all , in which case we say that
is strongly included in and write
for all , in which case we say that
is strongly included in and write  . We finally define
. We finally define  by
by

so that  for all and
for all and
 .
.
Addition, subtraction and scalar multiplication are defined in a natural
way on Taylor models. For multiplication, we need a projection  with
with  for all
and
for all
and  if
if  .
One way to construct such a mapping is as follows. For , we must take .
For
.
One way to construct such a mapping is as follows. For , we must take .
For  , let
be largest such that
, let
be largest such that  . Then
we recursively define
. Then
we recursively define  . Given
, we now define their product
by
. Given
, we now define their product
by

Using the observation that  ,
this product satisfies the inclusion property that
,
this product satisfies the inclusion property that  for any analytic functions and
for any analytic functions and  on .
on .
 -stable
Taylor models
-stable
Taylor models
For some applications, it is convenient to use Taylor models for
enclosing both an analytic function and a certain number of its
derivatives. Let us show how to incorporate this in our formalism.
Throughout this section, we assume that  and that
is an initial segment with
and that
is an initial segment with  .
.
Given a Taylor model  and
and  , we notice that
, we notice that  can be
regarded as a Taylor model in
can be
regarded as a Taylor model in  with
with  . Let
. Let  be an analytic
function and
be an analytic
function and  . We define the
relations
. We define the
relations  and
and  by
by

Clearly,  for all and
.
for all and
.
Let  be an operation. Then
be an operation. Then  is said to -lift to
is said to -lift to  , if for all
, if for all  and all
and all  , we have
, we have  . Addition, subtraction and scalar
multiplication -lift in the
usual way. As to multiplication, we take
. Addition, subtraction and scalar
multiplication -lift in the
usual way. As to multiplication, we take

with

In order to see that  satisfies the -inclusion property, it suffices to check that
satisfies the -inclusion property, it suffices to check that

for all  . This is clear if
. This is clear if
 . Otherwise,
. Otherwise,

For any  with
with  ,
there exists a
,
there exists a  with
with  . Hence,
. Hence,
In the particularly useful case when  ,
we notice that
,
we notice that  for all
for all  and
and  for all .
for all .
The major problem in the area of ball arithmetic is overestimation. For
example, even though the expression  evaluates to
zero for any
evaluates to
zero for any  , its evaluation
at any ball in
, its evaluation
at any ball in  with a non zero radius is not
identically equal to zero. For instance,
with a non zero radius is not
identically equal to zero. For instance,

Algorithms which rely on ball arithmetic have to be designed with care in order to avoid this kind of overly pessimistic error bounds. In particular, if we evaluate a dag using ball arithmetic, then a symbolically equivalent dag might lead to better error bounds.
Consider a continuous function with as in section 3.1. We recall that is said to lift into an operation
if the inclusion property

is satisfied for all  and . Clearly, such a lift is not unique: for any
and . Clearly, such a lift is not unique: for any  with
with  for all
for all  , the function
, the function  is also
a lift of . If we require
that
is also
a lift of . If we require
that  , then the best possible
lift is given by
, then the best possible
lift is given by

In general, this lift may be expensive to compute. Nevertheless, its
existence suggest the following definition of the quality of a lift. The
overestimation  of
of  at is defined by
at is defined by
 |
This quantity is easier to study if we let  tend
to zero. Accordingly, we also define the pointwise
overestimation function
tend
to zero. Accordingly, we also define the pointwise
overestimation function  by
by
 |
Here  means that
means that  and
and
 .
.
If is computed by evaluating a dag , then it would be nice to have explicit
formulas for the pointwise overestimation. For  and assuming that the lift
and assuming that the lift  is evaluated using
the default ball implementations of
is evaluated using
the default ball implementations of  and
and  from section 3.1 , we claim that there
exists a dag
from section 3.1 , we claim that there
exists a dag  with
with

for  . Indeed, we may compute
using the rules
. Indeed, we may compute
using the rules
 |
 |
 |
(c∈𝕂) |
 |
|
 |
(k∈{1,…,r}) |
 |
|
 |
|
 |
|
 |
where  stands for the -th coordinate function. Now we also have
stands for the -th coordinate function. Now we also have

for . Consequently,

If  , then this formula
simplifies to
, then this formula
simplifies to

Example  , let us compare the dags
, let us compare the dags
 and
and  .
We have
.
We have  and
and  ,
whence
,
whence
The example shows that we have an infinite amount of overestimation near
double zeros, except if the dag is explicitly given as a square near the
double zero. More generally, for the dag  with an
with an
 -fold zero, we obtain
-fold zero, we obtain

At a distance  of the zero, ball arithmetic thus
produces bounds which are
of the zero, ball arithmetic thus
produces bounds which are  times too pessimistic.
times too pessimistic.
Remark

for all polynomial dags  and balls
and balls  . This inequality seems to hold in all easy
cases that we have looked at, but we do not have a proof that it holds
in general.
. This inequality seems to hold in all easy
cases that we have looked at, but we do not have a proof that it holds
in general.
The example 2 shows that standard ball arithmetic generally produces an infinite amount of overestimation near double or multiple zeros. This raises the problem how to compute better ball lifts which do not present this drawback.
One possible remedy is to systematically compute the ball lifts using
Taylor models. Indeed, assume that we want to evaluate
at the ball  . Let
. Let  , and be as in section 3.2 and let
, and be as in section 3.2 and let  be the corresponding domain of Taylor models in
be the corresponding domain of Taylor models in  . Let
. Let  and
consider the Taylor model evaluation of at
and
consider the Taylor model evaluation of at 

Then

yields an enclosure of  .
Although the evaluation of
.
Although the evaluation of  is usually far more
expensive than the evaluation of
is usually far more
expensive than the evaluation of  ,
let us now study how much the overestimation has been reduced.
,
let us now study how much the overestimation has been reduced.
Let  and let us introduce the operator
and let us introduce the operator  , which generalizes the mapping
, which generalizes the mapping
 . The operator is defined by
induction over the size of :
. The operator is defined by
induction over the size of :
 |
|
 |
(c∈𝕂) |
 |
|
 |
(k∈{1,…,r}) |
 |
|
 |
|
 |
|
 |
For  as above, we then have
as above, we then have

Now assume that  and let
and let  be the valuation of at
be the valuation of at  . If
. If  ,
then we have
,
then we have
If  , then we still have (8), but (9) and (10) become
, then we still have (8), but (9) and (10) become

If  , then we generally have
, then we generally have

although  may occur in lucky cases.
may occur in lucky cases.
Let  be an open subset of
be an open subset of  and
and  an analytic function. We consider as a function
an analytic function. We consider as a function  in
and the time , where
in
and the time , where
 and
and  ,
and also call a homotopy. Assuming that
,
and also call a homotopy. Assuming that
 for some
for some  and that we are
not in a “degenerate” case, there exists a unique analytic
function
and that we are
not in a “degenerate” case, there exists a unique analytic
function  with
with  for all
. We are interested in the
value of
for all
. We are interested in the
value of  when
when  .
More generally, given a vector
.
More generally, given a vector  of vectors, there
exists a unique function
of vectors, there
exists a unique function  with
with  for all .
for all .
The goal of a numeric path tracker is to approximate the function  as well and as quickly possible and, above all, to
compute its value
as well and as quickly possible and, above all, to
compute its value  at the “end point”
. In what follows, we will
denote by
at the “end point”
. In what follows, we will
denote by  the set of floating point numbers with
the set of floating point numbers with
 bit mantissas. We also define
bit mantissas. We also define  ,
,  and assume that we
have a program for computing a numeric approximation
and assume that we
have a program for computing a numeric approximation  of . Given
of . Given  with
with  , we thus want to
compute
, we thus want to
compute  with
with  ,
by following the homotopy.
,
by following the homotopy.
In many cases, we will be interested in homotopies for solving a system
 |
(11) |
of polynomial equations. The number  of solutions
to a generic system of this kind is given by the Bezout number
of solutions
to a generic system of this kind is given by the Bezout number  , where
, where  is
the total degree of
is
the total degree of  for each . For suitable scaling parameters
for each . For suitable scaling parameters  , we now define
, we now define  by
by

Let

For any  , the point
, the point

clearly satisfies  , whereas
any
, whereas
any  with
with  satisfies
satisfies  .
.
If the system (11) is zero dimensional and the values  are complex and sufficiently random (we also say that
the homotopy is in general position), then the system
are complex and sufficiently random (we also say that
the homotopy is in general position), then the system  is also zero dimensional for every
is also zero dimensional for every  .
In what follows we will always assume that the homotopy has been chosen
in such a way.
.
In what follows we will always assume that the homotopy has been chosen
in such a way.
One classical difficulty with homotopy methods for solving a polynomial
system (11) is that many of the solution paths  may tend to infinity in the sense that
may tend to infinity in the sense that  for some and .
Computations which infinities can be avoided by rewriting the equations
in projective coordinates. More precisely, setting
for some and .
Computations which infinities can be avoided by rewriting the equations
in projective coordinates. More precisely, setting  , the projectivation
, the projectivation  of
a polynomial
of
a polynomial  is defined by
is defined by

Applying this to the system (11), we obtain a new system
 |
(12) |
of homogeneous equations in  .
For a random hyperplane
.
For a random hyperplane
the composite system (12–13) is again zero dimensional, but without solutions at infinity. It is easy to reconstruct solutions to (11) from solutions to (12–13) and vice versa.
Assume that we have a way to approximate the Jacobian  of by
of by  .
For instance, if is given by a dag, then a dag
for can be computed using forward
differentiation, and
.
For instance, if is given by a dag, then a dag
for can be computed using forward
differentiation, and  just corresponds to the
approximated evaluation of this dag.
just corresponds to the
approximated evaluation of this dag.
Assume that we are given  and
and  at a certain point where
at a certain point where  . We
may write
. We
may write  as the horizontal join of two matrices
as the horizontal join of two matrices
 and
and  .
Given
.
Given  close to ,
we may find a
close to ,
we may find a  for which
for which  using Euler-Newton's method
using Euler-Newton's method

The replacement  is called a prediction
step. We may still apply the formula when
is called a prediction
step. We may still apply the formula when  ,
in which case
,
in which case  is usually a better approximation
than to a genuine zero of
at than .
In this situation, the replacement
is usually a better approximation
than to a genuine zero of
at than .
In this situation, the replacement  is called a
correction step.
is called a
correction step.
From the computational point of view, the evaluation of the Jacobian
 is usually about
is usually about  times
more expensive than the evaluation of the function
times
more expensive than the evaluation of the function  itself (except for large and sparse
itself (except for large and sparse  ). Instead of reevaluating the Jacobian after
the prediction step at
). Instead of reevaluating the Jacobian after
the prediction step at  , it
may therefore be worth it to perform a few correction steps using the
Jacobian at
, it
may therefore be worth it to perform a few correction steps using the
Jacobian at  instead:
instead:

Since the convergence of  is only linear, the
number
is only linear, the
number  is typically chosen quite small (
is typically chosen quite small ( ). One full prediction-correction
cyclus now just consists of the replacement
). One full prediction-correction
cyclus now just consists of the replacement  .
.
From the complexity point of view, the evaluation of  and is usually far more expensive than the cost
and is usually far more expensive than the cost
 of linear algebra at size , at least for the examples we will be interested in
here. Therefore, it will not be necessary to device the linear algebra
algorithms with special care (for instance, we may simply compute the
inverse
of linear algebra at size , at least for the examples we will be interested in
here. Therefore, it will not be necessary to device the linear algebra
algorithms with special care (for instance, we may simply compute the
inverse  once and for all, instead of using LU
decompositions). On the other hand, we typically want to increase the
step size
once and for all, instead of using LU
decompositions). On the other hand, we typically want to increase the
step size  as much as possible, while trying to
stay reasonably close to the true solution path.
as much as possible, while trying to
stay reasonably close to the true solution path.
One obvious source of numeric errors is when the numeric precision being used is insufficient for producing sensible results. In [BSHW08], a strategy has been proposed for selecting a sufficient precision for homotopy methods to be numerically reliable. We will now propose an alternative method for finding such a precision, whose justification is based on a simpler argument.
Let be the current working precision. Our method
is based on the following idea: when evaluating , the actual precision  of
the result is usually smaller than and of the
form
of
the result is usually smaller than and of the
form  for some fixed constant. We will call the effective precision and we may expect
the numeric evaluations to be reliable as long as
is picked sufficiently large such that
for some fixed constant. We will call the effective precision and we may expect
the numeric evaluations to be reliable as long as
is picked sufficiently large such that  remains
above a certain threshold
remains
above a certain threshold  (e.g.
(e.g.
 ).
).
We still need a more precise definition of the effective precision or a
simple way to compute it. Assuming that admits a
ball lift, we may evaluate  at the ball
at the ball  . Then
. Then

provides an estimate for the relative precision of  . If ,
then this precision is potentially quite low. In that case, we may also
consider
. If ,
then this precision is potentially quite low. In that case, we may also
consider  at the next time . Instead of performing one extra ball evaluation,
we may also use the following approximation of :
at the next time . Instead of performing one extra ball evaluation,
we may also use the following approximation of :

We now take

for the current effective precision at and
assuming a current step size  .
.
Since purely numeric homotopy methods are usually being designed for speed, the main focus is not on being 100% fool proof. Nevertheless, it remains worth it to search for cheap ways in order to detect errors and adapt the stepsize so as to avoid potential errors.
Now assume that we perform one full prediction correction cyclus  . We first need a criterion for
when to accept such a step. The main problem with the design of numeric
criteria is there is no way to decide whether a numeric quantity is
small or large; such checks can only be performed with respect to other
quantities. Instead of checking whether we remain close to the genuine
solution path, it is therefore more robust to check that the Jacobian
does not change not change to quickly on the
interval
. We first need a criterion for
when to accept such a step. The main problem with the design of numeric
criteria is there is no way to decide whether a numeric quantity is
small or large; such checks can only be performed with respect to other
quantities. Instead of checking whether we remain close to the genuine
solution path, it is therefore more robust to check that the Jacobian
does not change not change to quickly on the
interval  .
.
More precisely, let ,  ,
,  and
and  . Then it is natural to only accept
steps for which
. Then it is natural to only accept
steps for which
for a fixed threshold  (e.g.
(e.g.  ). Here we may use any matrix norm
). Here we may use any matrix norm
 , so it is most convenient to
chose one which is easy to compute:
, so it is most convenient to
chose one which is easy to compute:

The condition (14) is not fully satisfactory yet, since it
relies on the expensive computation of a Jacobian  . This is acceptable if the step has a good chance
of being accepted (since we will need the Jacobian anyway for the next
step), but annoying if the step is to be rejected. Before checking (14), it is therefore wise to perform a few cheaper checks in
order to increase the probability that (14) will hold
indeed. In particular, if
. This is acceptable if the step has a good chance
of being accepted (since we will need the Jacobian anyway for the next
step), but annoying if the step is to be rejected. Before checking (14), it is therefore wise to perform a few cheaper checks in
order to increase the probability that (14) will hold
indeed. In particular, if  ,
then we may verify that
,
then we may verify that
for the max-norm on vectors, where  (e.g.
(e.g.  ) and
) and
 . This simplified check is
linked to (14) by remarking that
. This simplified check is
linked to (14) by remarking that  . The new check (15) should not be
applied when and are too
close for
. The new check (15) should not be
applied when and are too
close for  and
and  to be
computed with sufficient precision. More precisely, it should really be
replaced by the check
to be
computed with sufficient precision. More precisely, it should really be
replaced by the check
where  is slightly smaller than one
(e.g.
is slightly smaller than one
(e.g.  ) and
) and  stands for the “effective working
precision” from section 4.4.
stands for the “effective working
precision” from section 4.4.
In addition to the above checks, one might wish to ensure that is reasonably small after each step. Unfortunately, there
is no satisfactory reference with respect which smallness can be
checked, except for  . The
best we can do therefore consists of checking whether
. The
best we can do therefore consists of checking whether  tend to
tend to  at some indicated rate:
at some indicated rate:
for all  , where
, where  (e.g.
(e.g.  ).
Again, we need to insert a safety exemption for the case when the
convergence is exceptionally good.
).
Again, we need to insert a safety exemption for the case when the
convergence is exceptionally good.
Once that we have a criterion on whether a step
should be accepted, an algorithm for automatic stepsize control is
easily implemented: assuming that we are walking from
to , we start by setting
 . Given
and , we try a step until
. Given
and , we try a step until  . If the
step fails, then we set
. If the
step fails, then we set  with
with  (e.g.
(e.g.  ), and
retry for the smaller stepsize. Otherwise, we accept the step
), and
retry for the smaller stepsize. Otherwise, we accept the step  and set
and set  for the next step, where
for the next step, where
 (e.g.
(e.g.  ).
).
Another way to look at the numerical error problem is to investigate
what can actually go wrong. Theoretically speaking, around each true
solution path , there exists
a small tube  of variable polyradius
of variable polyradius  , where Newton's method converges to the true
solution . As long as our
current approximation at time
remains in this tube , no
errors will occur. Now the Newton iterations have a strong tendency of
projecting back into the tubes, especially if we use the additional
safeguard (17). Nevertheless, it might happen that we jump
from one tube into another tube, whenever two solution paths come close
together.
, where Newton's method converges to the true
solution . As long as our
current approximation at time
remains in this tube , no
errors will occur. Now the Newton iterations have a strong tendency of
projecting back into the tubes, especially if we use the additional
safeguard (17). Nevertheless, it might happen that we jump
from one tube into another tube, whenever two solution paths come close
together.
If we are considering a homotopy for solving a polynomial system  , then various solution paths will
actually meet at if the system admits multiple
roots. Such multiple roots are an intrinsic difficulty and we will need
dedicated “end game” strategies to ensure good numeric
convergence in this case (see section 5 below).
, then various solution paths will
actually meet at if the system admits multiple
roots. Such multiple roots are an intrinsic difficulty and we will need
dedicated “end game” strategies to ensure good numeric
convergence in this case (see section 5 below).
For  , and for suitably
prepared functions , the
Lebesgue probability that two solutions paths meet at a point is zero.
Nevertheless, we may have near collisions, which usually occur in pairs:
the probability that more than two paths simultaneously pass close to a
same point is extremely low.
, and for suitably
prepared functions , the
Lebesgue probability that two solutions paths meet at a point is zero.
Nevertheless, we may have near collisions, which usually occur in pairs:
the probability that more than two paths simultaneously pass close to a
same point is extremely low.
So assume that we have a near collision of two solution paths. Then we
have a true collision at  for some complex time
for some complex time
 near the real axis. Locally around this
collision point, the two paths are then given by
near the real axis. Locally around this
collision point, the two paths are then given by

for some vector  . If we only
know
. If we only
know  at a few points, then we may try to compute
at a few points, then we may try to compute
 , and
, and also check whether the
second path
, and
, and also check whether the
second path  indeed exists.
indeed exists.
Now assume that we have approximated and
derivative  at two times
at two times  . Denote these approximations by
. Denote these approximations by  ,
,  ,
,
 and
and  .
Then
.
Then

for  , whence we may use the
following approximations for
, whence we may use the
following approximations for  and :
and :
We next perform several safety checks. First of all, we obtained  as the division of two vectors; we may use the mean
value of the componentwise divisions and check that the variance remain
small. We next verify that
as the division of two vectors; we may use the mean
value of the componentwise divisions and check that the variance remain
small. We next verify that  and
and  are reasonably close. We also verify that the Newton iteration starting
at
are reasonably close. We also verify that the Newton iteration starting
at  converges to a solution close to
converges to a solution close to  . We finally verify that the same thing holds
for
. We finally verify that the same thing holds
for  instead of
instead of  ,
where
,
where  .
.
We will not go into technical details on the precise numerical checks
here, since section 5.3 below contains a similar discussion
for the case of multiple roots at .
We may also adapt the herd iteration from section 5.2 below
to near collisions, which allows for the simultaneous continuation of
and .
Contrary to the case when ,
we also need to recompute better estimations of
at every step, which can be done via the simultaneous
computation of  and the two
“conjugate” paths
and the two
“conjugate” paths  with
with  . Indeed, using the higher order expansion
. Indeed, using the higher order expansion

we get

from which we may deduce high quality approximations of  and
and  . As soon as
. As soon as  is small with respect to
is small with respect to  ,
then the junction between paths and their conjugates occurs and we know
how to traverse the near collision.
,
then the junction between paths and their conjugates occurs and we know
how to traverse the near collision.
Consider a homotopy induced by a polynomial system (11)
with a zero dimensional set of solutions. It frequently occurs that some
of the solutions are multiple roots, in which case the predictor
corrector algorithm slows down significantly when
approaches . This is due to
the fact that Newton's method only has a linear convergence if we are
approaching a multiple root, whereas the convergence is quadratic for
single roots.
In order to get a better understanding of this phenomenon, it is
instructive to quantify the slow down in the case of an -fold root of a univariate polynomial  , which is more or less
representative for the general case. In the neighbourhood of the root
, which is more or less
representative for the general case. In the neighbourhood of the root
 , we have
, we have

with  . Hence, the Newton
iteration becomes
. Hence, the Newton
iteration becomes
In particular, we see that we need roughly
iterations in order to divide by  . We also notice that
. We also notice that  is roughly divided by at every iteration. For
complexity measures, it is more reasonable to study the speed of
convergence of rather than
itself. Indeed, the relative precision of an -fold root is intrinsically
times smaller than the working precision.
is roughly divided by at every iteration. For
complexity measures, it is more reasonable to study the speed of
convergence of rather than
itself. Indeed, the relative precision of an -fold root is intrinsically
times smaller than the working precision.
If we are rather considering a homotopy  ,
then we usually have
,
then we usually have  .
Locally, we may thus write
.
Locally, we may thus write

Assume that we have  for small
and , so that
for small
and , so that

Then the Euler-Newton iteration for step size
yields
Following our criterion (14), we should have

Roughly speaking, this means that  .
Hence, is multiplied by
.
Hence, is multiplied by  at every step and is multiplied by every steps.
at every step and is multiplied by every steps.
For high precision computations, it would be nice to have an algorithm
with quadratic convergence in .
Before we give such an algorithm, let us first introduce some
terminology and study the behaviour of the solutions paths when .
By assumption, we are given a system (11) with an -fold root  . Consider a solution path
for the homotopy with
. Consider a solution path
for the homotopy with  . Since
is algebraic in ,
we may expand
. Since
is algebraic in ,
we may expand

as a Puiseux series in for a certain
ramification index (which we assume to be taken
minimal). Now letting turn around once, we have

where  . When turning
repeatedly, we thus obtain pairwise distinct
solutions paths
. When turning
repeatedly, we thus obtain pairwise distinct
solutions paths  with
with  . We will call such a family of solution paths a
herd.
. We will call such a family of solution paths a
herd.
Contrary to the homotopy methods from section 4, which
operate on individual paths, the iteration that we will present now
simultaneously operates on all paths in a herd. Consider a solution path
with as above and the
corresponding herd  with . We assume that both
with . We assume that both  and
and
 are known for a given
and all . Let
are known for a given
and all . Let  and
and  denote the FFT-transforms of
the vectors
denote the FFT-transforms of
the vectors  and
and  with
respect to
with
respect to  . Then we have
. Then we have
for all . We now compute  using the formulas
using the formulas
For  of the order of
of the order of  , we now have
, we now have
for all . We call (18)
the herd prediction. This prediction may be corrected using
conventional Newton iterations at time  , for a fixed constant
, for a fixed constant  . A complete cyclus of this type will be called
a herd iteration.
. A complete cyclus of this type will be called
a herd iteration.
Several technical details need to be settled in order to obtain a robust
implementation of herd iterations. First of all, we need a numeric
criterion for deciding when the approximations  and are of a sufficient quality for starting our
herd iteration. Clearly, the error of the approximation should be in
and are of a sufficient quality for starting our
herd iteration. Clearly, the error of the approximation should be in
 .
.
We may first ensure ourselves that the approximation can not
substantially be improved using Newton iterations: let  be the result of applying one Newton iteration to
be the result of applying one Newton iteration to  at time . Then we check
whether
at time . Then we check
whether
for some threshold  , such as
, such as
 (although this check becomes unstable if
(although this check becomes unstable if  , we notice that this situation
cannot arise systematically for ).
, we notice that this situation
cannot arise systematically for ).
The check (19) for does not yet
guarantee that the correspond to approximate
evaluations of the Puiseux expansions. In order to check that this is
indeed the case, we first compute the  as
described in the previous section. Defining
as
described in the previous section. Defining

we next evaluate  for all
for all  and apply one Newton iteration at time to the
results, yielding
and apply one Newton iteration at time to the
results, yielding  . We now
check whether
. We now
check whether
for some threshold  , such as
, such as
 , and all . Of course, this second check is more
expensive than the first check (19). The thresholds should
therefore be adjusted in such a way that the second check is likely to
succeed whenever the first one does.
, and all . Of course, this second check is more
expensive than the first check (19). The thresholds should
therefore be adjusted in such a way that the second check is likely to
succeed whenever the first one does.
The above criteria can also be used for deciding whether a proposed herd
iteration from to should
be accepted or not. We still have to decide how to chose . For a fixed constant  and a positive integer
and a positive integer  which may change at every
step, we will take
which may change at every
step, we will take

If a step is accepted, then we increase by one
or a larger integer smaller than  .
If a step is not accepted, then we decrease by
one and repeat the same procedure until acceptance or
.
If a step is not accepted, then we decrease by
one and repeat the same procedure until acceptance or  . If ,
then we have either reached the best possible accuracy for the current
working precision, or our paths did not really
converge to the same point .
The first case occurs whenever the effective precision from section 4.4 drops below a given threshold. In the latter case, we
revert to individual homotopies for further continuation.
. If ,
then we have either reached the best possible accuracy for the current
working precision, or our paths did not really
converge to the same point .
The first case occurs whenever the effective precision from section 4.4 drops below a given threshold. In the latter case, we
revert to individual homotopies for further continuation.
Let us now go back to the initial polynomial system (11)
and assume that we have computed numerical approximations of all individual homotopies  up till
a certain time . We need a
way to partition the individual paths into herds. One obvious way is to
follow all solution paths from to
up till
a certain time . We need a
way to partition the individual paths into herds. One obvious way is to
follow all solution paths from to  and deduce the corresponding permutation of
and deduce the corresponding permutation of  . However, this computation is quite expensive,
so it would be nice to have something faster.
. However, this computation is quite expensive,
so it would be nice to have something faster.
A first step towards the detection of herds is to find all clusters,
i.e. all groups of paths which tend to the same limit . Here we notice that one cluster
may contain several herds, as in the example
where all four solution paths  with
with  tend to the quadruple root
tend to the quadruple root  of
of
 . This cluster contains two
herds
. This cluster contains two
herds  and
and  .
.
Now let and for all
. For each , we consider the ball

The radii of these balls has been chosen with care, such that, with high
probability, any two paths which belong to the same herd are also in the
same connected component of  .
This is best verified on the case of path
.
This is best verified on the case of path  .
Then the next path in the cluster is
.
Then the next path in the cluster is  and
and
An efficient way to separate different connected components of  is via projection. Let
is via projection. Let  be a random
vector of real numbers of length
be a random
vector of real numbers of length  .
Then any point
.
Then any point  may be projected to the vector
product
may be projected to the vector
product  . Applying this
projection to our balls
. Applying this
projection to our balls  , we
obtain intervals
, we
obtain intervals  . We may
sort the (and the corresponding ) on their centers in time
. We may
sort the (and the corresponding ) on their centers in time  and compute the various connected components of
and compute the various connected components of  using a linear pass. Whenever and
using a linear pass. Whenever and  are in different connected components, then so are and
are in different connected components, then so are and  .
Assuming that is sufficiently small, application
of this procedure for
.
Assuming that is sufficiently small, application
of this procedure for  random vectors
random vectors  results with probability one in the separation of all
connected components corresponding to different clusters.
results with probability one in the separation of all
connected components corresponding to different clusters.
Let  be a set of indices such that the
be a set of indices such that the  with
with  form a cluster with limit
. We still need a way to find
the various herds inside the cluster. In a similar way as in section 5.3, we may improve the quality of our approximations
form a cluster with limit
. We still need a way to find
the various herds inside the cluster. In a similar way as in section 5.3, we may improve the quality of our approximations  and
and  via Newton
iteration until
via Newton
iteration until  and
and  . From now on, we assume that we have done this.
. From now on, we assume that we have done this.
For each and  ,
we may write
,
we may write

for some  and
and  .
We obtain a good approximation
.
We obtain a good approximation  using
using
If  is not too large (so that
is not too large (so that  has a small numerator and denominator), then we also obtain reasonably
accurate approximations
has a small numerator and denominator), then we also obtain reasonably
accurate approximations  and
and  by
by
and check whether

is indeed close to some  with
with  . Doing this for all , we thus obtain a candidate permutation
. Doing this for all , we thus obtain a candidate permutation  with
with  for all . Each cycle in this permutation induces a
candidate herd. Using the criteria from 5.3, we may next
check whether the quality of the candidate herd is sufficient. If not,
then we may always resort to the more expensive computation of the
solution path from to .
for all . Each cycle in this permutation induces a
candidate herd. Using the criteria from 5.3, we may next
check whether the quality of the candidate herd is sufficient. If not,
then we may always resort to the more expensive computation of the
solution path from to .
Our algorithms for the previous sections for cluster and herd detection
rely on the availability of approximations on
all paths at the same time .
Usually the individual homotopies are launched in parallel and advance
at different speeds. Consequently, the synchronization of all paths at
the same time is a non trivial matter.
Strictly speaking, we notice that it is not necessary to synchronize all paths, but rather those paths which belong to the same cluster or herd. In particular, we will concentrate on those paths which tend to multiple roots.
So consider a path which tends to a multiple
root . As long as is approximated using an individual continuation, we have
seen that the convergence to is linear. For a
fixed  (such as
(such as  ),
the computation of at all
“checkpoints”
),
the computation of at all
“checkpoints”  thus only requires a
constant overhead. At every checkpoint, we may now launch the algorithm
for the detection of clusters. For every candidate cluster
thus only requires a
constant overhead. At every checkpoint, we may now launch the algorithm
for the detection of clusters. For every candidate cluster  , we next determine the checkpoint
, we next determine the checkpoint  with highest at which
with highest at which  is available for all .
We launch our algorithm for the detection of herds at this checkpoint
is available for all .
We launch our algorithm for the detection of herds at this checkpoint
 .
.
In addition, it is a good practice to check that we still have points on
all paths at every checkpoint. For paths which tend to a single root, we may approximate for large using a single step
continuation from to . For the approximation of
using (21), we notice that it important that no paths of
the cluster are missing or counted twice. Indeed, in the contrary case,
we only have  with
with  for
all , which is insufficient
for the computation of accurate approximations of
and
for
all , which is insufficient
for the computation of accurate approximations of
and  .
.
Consider an analytic function  on some open
subset of and assume
that admits a ball lift. Given an isolated root
of ,
it is well known that Newton's method converges to
in a small neighbourhood of .
It is a natural question to explicitly compute a ball neighbourhood for
which this is the case. One method which is both efficient and quite
tight was proposed by Krawczyk [Kra69]. Recall that
on some open
subset of and assume
that admits a ball lift. Given an isolated root
of ,
it is well known that Newton's method converges to
in a small neighbourhood of .
It is a natural question to explicitly compute a ball neighbourhood for
which this is the case. One method which is both efficient and quite
tight was proposed by Krawczyk [Kra69]. Recall that  denotes the Jacobian of .
denotes the Jacobian of .
 ,
,  and let
and let  be an analytic function.
Let
be an analytic function.
Let  be a ball enclosure of the set
be a ball enclosure of the set  . If
. If

then  admits a fixed point
admits a fixed point  .
.
Proof. For any ,
we have

Since  is convex, we also have
is convex, we also have

Hence

It follows that is an analytic function from the
compact ball  into itself. By Brouwer's fixed
point theorem, we conclude that there exists a
with
into itself. By Brouwer's fixed
point theorem, we conclude that there exists a
with  .
.
Proof. We apply the theorem for  .
.
The above method is still a bit unsatisfactory in the sense that it does
not guarantee the uniqueness of the solution. Denoting by  the interior of a subset
the interior of a subset  of
of  , the following sharpening of the
method is due to Rump [Rum80].
, the following sharpening of the
method is due to Rump [Rum80].
Proof. Let us first show that the spectral norm
(i.e. the norm of the largest eigenvalue) of any  is
is  . Indeed,
our assumption implies
. Indeed,
our assumption implies

Now consider the norm  on . Then, for any and
on . Then, for any and  with
with  , we
have
, we
have
whence  . This is only
possible if the spectral norm of
. This is only
possible if the spectral norm of  is .
is .
Now consider  . By what
precedes, any matrix in
. By what
precedes, any matrix in  is invertible. For any two distinct points
is invertible. For any two distinct points  ,
we have
,
we have

Since  is convex, there exists a matrix
is convex, there exists a matrix  with
with

By what precedes, it follows that  .
We conclude that
.
We conclude that  or
or  . The existence of a fixed point follows from
theorem 4.
. The existence of a fixed point follows from
theorem 4.
Proof. Application of theorem 6 for
.
Assuming that we have computed a numeric approximation  to a root of ,
a second question is how to find a suitable ball
to a root of ,
a second question is how to find a suitable ball  for which the corollaries apply. Starting with
for which the corollaries apply. Starting with  , a simple solution is consider the sequence defined
by
, a simple solution is consider the sequence defined
by
where

Whenever  , then we are done.
In order to ensure the convergence of this method, we need to tweak the
recurrence (22) and replace it by
, then we are done.
In order to ensure the convergence of this method, we need to tweak the
recurrence (22) and replace it by
for suitable small positive constants  and
and  . We refer to [Rum80]
for more details on this technique, which is called -inflation.
. We refer to [Rum80]
for more details on this technique, which is called -inflation.
Assume that the polynomial system (11) admits only simple
roots and that we have obtained numeric approximations  for all these roots using a numeric path tracker. Then theorem ?
suffices for the joint certification of the numeric approximations
for all these roots using a numeric path tracker. Then theorem ?
suffices for the joint certification of the numeric approximations  . Indeed, using the above
technique, we first compute balls
. Indeed, using the above
technique, we first compute balls  for which
theorem ? applies. To conclude, it then suffices to check
that these balls are pairwise disjoint. This can be done using the same
algorithm as for the detection of clusters, which was described in
section 5.4.
for which
theorem ? applies. To conclude, it then suffices to check
that these balls are pairwise disjoint. This can be done using the same
algorithm as for the detection of clusters, which was described in
section 5.4.
In the case when two balls  and
and  do intersect, then we recompute approximations for the paths and
do intersect, then we recompute approximations for the paths and  using a smaller step size,
that is, by lowering the constant
using a smaller step size,
that is, by lowering the constant  in (14).
We keep doing so until none of the balls
intersect; even if some of the paths
may have been permuted due to numerical errors, the final set
of all is correct if none of the balls
intersect. Indeed, each of the balls contains a solution and there can
be no more solutions than the number predicted by the Bezout bound.
in (14).
We keep doing so until none of the balls
intersect; even if some of the paths
may have been permuted due to numerical errors, the final set
of all is correct if none of the balls
intersect. Indeed, each of the balls contains a solution and there can
be no more solutions than the number predicted by the Bezout bound.
If and intersect then,
instead of recomputing the paths and using smaller and smaller step sizes, we may also search
for a way to certify the entire homotopy computations. This will be the
topic of the remainder of this section. Let us first show how to adapt
the theory from the previous section to certified path tracking. From
now on, we assume that is an analytic function
which admits a ball lift.
 be such that
be such that  . Let
. Let  and let
and let  be an invertible matrix with
be an invertible matrix with  . If
. If

then the equation  admits a unique root for each
admits a unique root for each  .
.
Proof. Let and consider
the function  . Then
. Then  encloses
encloses  and
and  encloses , and we conclude by
theorem 6.
encloses , and we conclude by
theorem 6.
Clearly, for any  , theorem 8 ensures the existence of a unique solution path from to in the tube
, theorem 8 ensures the existence of a unique solution path from to in the tube  . As at the end of the previous section, the
question again arises how to compute balls
. As at the end of the previous section, the
question again arises how to compute balls  and
and
 for which the conditions of the theorem are
likely to be satisfied. Since the computation of
for which the conditions of the theorem are
likely to be satisfied. Since the computation of  is expensive, it is important to keep down the number of iterations of
the type (22) or (23) as much as possible (say
at most one iteration).
is expensive, it is important to keep down the number of iterations of
the type (22) or (23) as much as possible (say
at most one iteration).
Now assume that we performed a numeric homotopy computation from to  . Then
a reasonable first guess is to take
. Then
a reasonable first guess is to take

for some  , say
, say  . Unfortunately, if one of the components of
. Unfortunately, if one of the components of
 tends to zero, then this guess turns out to be
inadequate. Therefore, it is recommended to use an additional inflation
proportional to the norm of :
tends to zero, then this guess turns out to be
inadequate. Therefore, it is recommended to use an additional inflation
proportional to the norm of :

for some small  , say
, say  . Another idea is to use the radius
of the previous step as a reference (except for the very first step, of
course). For instance, if our previous step went from
. Another idea is to use the radius
of the previous step as a reference (except for the very first step, of
course). For instance, if our previous step went from  to , then we may take
to , then we may take

for some small  , say
, say  .
.
One important disadvantage of the method from the previous section for
the certification of one path tracking step is that we use global error
bounds on the tube  .
Consequently, the inaccuracy
.
Consequently, the inaccuracy  of
is proportional to the step size
of
is proportional to the step size  ,
whence any overestimation in the evaluation of
or due to the inaccuracy in
requires a reduction of the step size.
,
whence any overestimation in the evaluation of
or due to the inaccuracy in
requires a reduction of the step size.
For this reason, it is much better to follow the solution path as
closely as possible instead of enclosing it in a “square
tube”. This can be achieved via the use of Taylor models.
Using -stable Taylor models,
it is possible to simultaneously compute of accurate enclosures for and on the tube.
More precisely, let  ,
,  and
and  . For
a fixed in
. For
a fixed in  ,
let be an initial segment of
,
let be an initial segment of  of the form
of the form

and let  . A -stable Taylor model in
. A -stable Taylor model in  will also be called a tubular model. We will write
will also be called a tubular model. We will write  for the set of tubular models. Given
for the set of tubular models. Given  , we let
, we let  and
and  be such that
be such that
for all  .
.

be an approximation of the solution  to
to
 . For instance, if
. For instance, if  and
and  ,
then we may take
,
then we may take  , with
, with
 and
and  .
Consider
.
Consider  and
and  with
with

Let  ,
,  ,
,  .
If
.
If
then the equation admits a unique solution
 , for every
, for every  .
.
Proof. For an illustration of the proof, see
figure 1. Let  and
and  . By construction, and using the facts that
. By construction, and using the facts that
 and
and  ,
we have
,
we have

for any  and
and  .
For a fixed , it follows that
.
For a fixed , it follows that
 encloses
encloses  on the disk
on the disk
 . Our hypothesis (24)
also implies that
. Our hypothesis (24)
also implies that

From theorem 6, we conclude that  admits a unique fixed point
admits a unique fixed point  .
.
In order to apply the theorem, it remains to be shown how to find a good
tube, i.e. how to choose  ,
,
 ,
,  ,
,  and
and  . For a fixed order of the
approximation, the idea is to adjust and such that can be chosen
minimal.
. For a fixed order of the
approximation, the idea is to adjust and such that can be chosen
minimal.
Let us first consider the first order case  .
Assume that we performed a numeric path continuation from
.
Assume that we performed a numeric path continuation from  to
to  and that both
and that both  and
and  are approximatively known. Then there exists
a unique curve
are approximatively known. Then there exists
a unique curve  of degree three with
of degree three with  ,
,  ,
,
 and
and  .
Let
.
Let  be a linear curve which minimizes the
maximum
be a linear curve which minimizes the
maximum  of
of  on for every .
Then we take
on for every .
Then we take  ,
,  ,
,  and
and  . We may also take
. We may also take  for
some fixed
for
some fixed  such as
such as  .
However, for better performance it is recommended to apply an additional
inflation to , similar to
what we did in the previous section.
.
However, for better performance it is recommended to apply an additional
inflation to , similar to
what we did in the previous section.
For higher orders , we
proceed in an essentially similar way. We first compute a high order
numeric polynomial approximation of  . For orders
. For orders  ,
this may require the accurate approximation of additional points
,
this may require the accurate approximation of additional points  with
with  on the solution path. We
next find a -th order
polynomial
on the solution path. We
next find a -th order
polynomial  which approximates
as good as possible and choose our tube in a similar way as above. It
should be noticed that the evaluation
which approximates
as good as possible and choose our tube in a similar way as above. It
should be noticed that the evaluation  in theorem
9 is at least thrice as expensive as the numeric evaluation
of . This makes it worth it
to improve the quality of the numeric approximations of points
in theorem
9 is at least thrice as expensive as the numeric evaluation
of . This makes it worth it
to improve the quality of the numeric approximations of points  on the curve using one or more additional Newton
iterations. The use of higher order approximations makes it possible to
choose very small, thereby avoiding a great deal
of the overestimation due to the use of ball arithmetic.
on the curve using one or more additional Newton
iterations. The use of higher order approximations makes it possible to
choose very small, thereby avoiding a great deal
of the overestimation due to the use of ball arithmetic.
In section 5.1, we have studied in detail the numeric
determination of a multiple root of a univariate polynomial. It is
instructive to take up this study and examine how we certify such
multiple roots. Since the property of being an -fold root is lost under small perturbations, this
is actually impossible using ball arithmetic. The best we can hope for
is to certify the existence of roots in a small
ball, or the existence of an -fold
root of a small perturbation of the polynomial (see also [Rum10]).
In this section we adopt the first point of view; a variant of the
approach to perturb the polynomial itself will be studied in the next
sections.
So consider a polynomial with an approximate
-fold root at  and assume that we wish to certify that
admits exactly roots in the ball
and assume that we wish to certify that
admits exactly roots in the ball  , for some
, for some  .
One first strategy is to make use of the Taylor series expansion of at
.
One first strategy is to make use of the Taylor series expansion of at  . More
precisely, let
. More
precisely, let  be the set of univariate Taylor
models in
be the set of univariate Taylor
models in  with and
with and  for some
for some  .
Evaluating at
.
Evaluating at  ,
we obtain a Taylor model
,
we obtain a Taylor model  with the property that
with the property that
 for any .
It remains to be shown that any admits roots in
for any .
It remains to be shown that any admits roots in  . We
claim that this is the case if
. We
claim that this is the case if
Indeed, assume that we have (25) and let . Then

for all with  .
By Rouché's theorem, it follows that
.
By Rouché's theorem, it follows that  and
and
 admit the same number of roots on . If becomes large, or
if admits other roots close to , then the bound (25) often does
not hold. In that case, one may use more sophisticated techniques from
[Sch82, vdH11] in order to certify that admits roots in . From the complexity point of view, the series
expansion method requires
admit the same number of roots on . If becomes large, or
if admits other roots close to , then the bound (25) often does
not hold. In that case, one may use more sophisticated techniques from
[Sch82, vdH11] in order to certify that admits roots in . From the complexity point of view, the series
expansion method requires  evaluations of , where
evaluations of , where  denotes the cost of multiplying two polynomials of degrees
denotes the cost of multiplying two polynomials of degrees  .
.
Another approach is to apply Rouché's theorem in a more direct
way by computing on a path  starting at and which circles around the origin
once. If the reliable image
starting at and which circles around the origin
once. If the reliable image  of this path avoids
the origin, then the number of roots of
coincides with the number of times that turns
around the origin. More precisely, let
of this path avoids
the origin, then the number of roots of
coincides with the number of times that turns
around the origin. More precisely, let  for a
suitable
for a
suitable  (see also below) and let
(see also below) and let  for
for  . Then we
evaluate
. Then we
evaluate  and check whether
and check whether  for all . If this is the
case, then
for all . If this is the
case, then

yields the exact number of roots of inside . This method requires  evaluations of ,
but needs to be sufficiently large if we want to
ensure a reasonable chance of success for the method.
evaluations of ,
but needs to be sufficiently large if we want to
ensure a reasonable chance of success for the method.
Let us investigate the choice of an appropriate
in more detail on the simplest example when and

Consider the evaluation of at  . We have
. We have
For small , the condition
 thus implies
thus implies

Roughly speaking, for  , this
means that
, this
means that
We recall from example 2 that  also
corresponds to the punctual overestimation of the ball evaluation of
at
also
corresponds to the punctual overestimation of the ball evaluation of
at  .
If we want to reduce to a quantity which does
not depend on , then it
follows from the considerations in section 3.5 that we need
to evaluate using Taylor models of order at
least . However, in that
case, we might just as well use the first method based on a direct
series expansion of at .
.
If we want to reduce to a quantity which does
not depend on , then it
follows from the considerations in section 3.5 that we need
to evaluate using Taylor models of order at
least . However, in that
case, we might just as well use the first method based on a direct
series expansion of at .
Let us now consider a more general system (11) and assume
that we are given a herd of solution paths  which
all tend (at least approximately) to the same limit . Instead of viewing the
which
all tend (at least approximately) to the same limit . Instead of viewing the  as distinct individual paths, we would like to consider the whole herd
as distinct individual paths, we would like to consider the whole herd
 as a single multivalued path.
as a single multivalued path.
From the algebraic point of view, it is more convenient to rather
consider the ideal  which annihilates
which annihilates  instead of itself. There are
several ways to represent this ideal by a system
instead of itself. There are
several ways to represent this ideal by a system
 of polynomial equations. One option is to
require that be a reduced Gröbner basis for
. Another option is to use
Kronecker representations. Since we are computing with balls of a fixed
bit precision, coefficient growth is not a problem, so it best to choose
a simple representation which minimizes the number of coefficient
parameters.
of polynomial equations. One option is to
require that be a reduced Gröbner basis for
. Another option is to use
Kronecker representations. Since we are computing with balls of a fixed
bit precision, coefficient growth is not a problem, so it best to choose
a simple representation which minimizes the number of coefficient
parameters.
Now recall that each can be considered as a
vector  of Puiseux series
of Puiseux series  in of valuations
in of valuations  .
Setting
.
Setting

we notice that  is invariant if we turn once around the origin. This means that
is really an analytic function in at the origin.
Assuming general position, is actually the
minimal annihilator of
is invariant if we turn once around the origin. This means that
is really an analytic function in at the origin.
Assuming general position, is actually the
minimal annihilator of  . In
what follows, we will represent by the system of
polynomials
. In
what follows, we will represent by the system of
polynomials
where  for each .
Now instead of evaluating the homotopy at an
ordinary point
for each .
Now instead of evaluating the homotopy at an
ordinary point  , we may
evaluate at a point
, we may
evaluate at a point  , where
, where  is the quotient
algebra
is the quotient
algebra  . When evaluating at
the multivalued point represented by (26),
we would take
. When evaluating at
the multivalued point represented by (26),
we would take  ,
,  . This leads to a lift of
as a homotopy
. This leads to a lift of
as a homotopy  , for some open
subset
, for some open
subset  of
of  .
.
In order to apply theorem 8, we need a homotopy over rather than .
Therefore, let us show how to reformulate  as a
homotopy
as a
homotopy  for a suitable open subset
for a suitable open subset  of
of  . The idea
is to encode the system (26) by a vector
. The idea
is to encode the system (26) by a vector

More precisely, given a point

we denote  for each .
Let
for each .
Let  and consider the evaluation
and consider the evaluation  of at
of at  ,
,
 and .
This is possible if for any root of the system
and .
This is possible if for any root of the system  .
There exists a unique point
.
There exists a unique point

such that  for all .
We take
for all .
We take  . If
can be computed by a dag of size
. If
can be computed by a dag of size  then
then  can be computed by a dag of size
can be computed by a dag of size  , since a multiplication in
can be done using a dag of size .
, since a multiplication in
can be done using a dag of size .
 be such that
be such that  and
and  . Assume that the
system admits no multiple zeros for
. Assume that the
system admits no multiple zeros for  , and let
, and let  and
and  be such that
be such that  for
all
for
all  and
and

Let  and let
and let  be an
invertible matrix with .
If
be an
invertible matrix with .
If
then there exist unique paths  with
with  ,
,  and
and

for all  and
and  .
.
Proof. By theorem 8, there exists a
unique solution  to the system
to the system  , for each ,
whence a unique set
, for each ,
whence a unique set  with
with  . The uniqueness implies that this set coincides
with the set of analytic continuations of the solution paths of
. The uniqueness implies that this set coincides
with the set of analytic continuations of the solution paths of  from
from  to
to  for each . After reordering,
this shows that there exist unique paths with
,
for each . After reordering,
this shows that there exist unique paths with
,  and
and
 , for all
and . Now for
, for all
and . Now for  , solutions of monic equations of the form
, solutions of monic equations of the form  remain bounded. By continuity, the
therefore tend to limits in
remain bounded. By continuity, the
therefore tend to limits in  ,
and
,
and  .
.
Using the univariate root certification methods from section 7.1,
we may also compute ball enclosures for  .
The theorem therefore provides a way to certify all solutions of a
numeric homotopy associated to a polynomial system (11),
even in the presence of multiple solutions.
.
The theorem therefore provides a way to certify all solutions of a
numeric homotopy associated to a polynomial system (11),
even in the presence of multiple solutions.
Indeed, let  be the set of all solution paths.
For some small
be the set of all solution paths.
For some small  , we perform a
certified homotopy continuation from until
, we perform a
certified homotopy continuation from until  , using the techniques from section
6. This is possible since the
, using the techniques from section
6. This is possible since the  are
pairwise distinct, when assuming general position. We next partition
are
pairwise distinct, when assuming general position. We next partition
 , such that
, such that  is either a singleton or a herd for each .
For each singleton, we try to apply theorem 8 for
is either a singleton or a herd for each .
For each singleton, we try to apply theorem 8 for  and for each herd, we try to apply theorem 10.
If this works, then we obtain the desired enclosures for the solutions
of (11), counted with multiplicities. If not, then we
choose a smaller and repeat the same procedure.
and for each herd, we try to apply theorem 10.
If this works, then we obtain the desired enclosures for the solutions
of (11), counted with multiplicities. If not, then we
choose a smaller and repeat the same procedure.
For the termination of this algorithm, it remains to be checked that
theorem 10 indeed applies if is
sufficiently small. In other words, setting  , we have to show that
, we have to show that  is
invertible. We will only give a rough justification, which we intend to
work out in a forthcoming paper. Assuming the contrary and
“general position”, the perturbation
of
is
invertible. We will only give a rough justification, which we intend to
work out in a forthcoming paper. Assuming the contrary and
“general position”, the perturbation
of  would exhibit a non trivial monodromy in
, and contradict our
assumption that the set is stable under
monodromy. We finally notice that our algorithm also works in degenerate
situations if we let be a cluster of paths
instead of a herd.
would exhibit a non trivial monodromy in
, and contradict our
assumption that the set is stable under
monodromy. We finally notice that our algorithm also works in degenerate
situations if we let be a cluster of paths
instead of a herd.
Remark  -fold
root
-fold
root  . Nevertheless, if we
assume that this is indeed the case, then we notice that can be approximated with a precision which is close
to the current working precision. Indeed, if the herd is given by the
system (26), then we may approximate
using
. Nevertheless, if we
assume that this is indeed the case, then we notice that can be approximated with a precision which is close
to the current working precision. Indeed, if the herd is given by the
system (26), then we may approximate
using  ,
,  .
.
Although we have shown how to translate the homotopy
into a homotopy , we do want
to exploit the multiplication in for
computational purposes. In particular, we want to exploit this structure
for the computation of the Jacobian  .
As in the case of usual Jacobians, we may compute
.
As in the case of usual Jacobians, we may compute  by evaluating at ,
by evaluating at ,
 and
and  in the deformed
algebra
in the deformed
algebra

Denoting the result of this evaluation by  ,
we may write
,
we may write  , where
, where  and
and  are polynomials of
degrees
are polynomials of
degrees  in .
Reinterpreting the as elements of (which is correct modulo an error in
in .
Reinterpreting the as elements of (which is correct modulo an error in  ), we obtain
), we obtain

Now for any  , multiplication
by in can be represented
by a matrix
, multiplication
by in can be represented
by a matrix  in the monomial basis
in the monomial basis  of . Similarly,
any matrix
of . Similarly,
any matrix  induces a
induces a  block matrix
block matrix

By construction, we now have
Now the computation of  and its inverse can be
done using dags of sizes
and its inverse can be
done using dags of sizes  ,
whence multiplication of
,
whence multiplication of  or its inverse with a
vector in can be done a dag of size . In particular, the evaluation of the left
hand side of (27) can be done using a dag of size over
or its inverse with a
vector in can be done a dag of size . In particular, the evaluation of the left
hand side of (27) can be done using a dag of size over  . This is
better than a direct computation of which
requires a dag of size
. This is
better than a direct computation of which
requires a dag of size  .
.
A second issue which has been hidden by the current presentation
concerns numeric stability. If the herd indeed tends to an -fold root when , then  tends to
tends to  . Now
straightforward arithmetic in
. Now
straightforward arithmetic in  tends to be quite
unstable. For instance, the evaluation of a polynomial of degree typically gives rise to a precision loss of
tends to be quite
unstable. For instance, the evaluation of a polynomial of degree typically gives rise to a precision loss of  digits. This can be avoided using a shift: instead of
working in
digits. This can be avoided using a shift: instead of
working in  and evaluating at , we rather work in
and evaluating at , we rather work in  and
evaluate at
and
evaluate at  . More generally,
if
. More generally,
if  , then we take
, then we take  , where
, where  , and evaluate at
, and evaluate at  .
.
Another question is whether we can avoid using the extra time parameter
for the final certification. Indeed, corollary
7 is sufficient for the certification of a single isolated
root. More generally, let be a cluster of
solutions which tend to an -fold
root . We may forget about
the last equation  and, for some small
and, for some small  , compute all solutions to the
system
, compute all solutions to the
system  which are close to
(e.g. by homotopies starting at the
which are close to
(e.g. by homotopies starting at the  ). The system
). The system  may then be
regarded as a homotopy with respect to the time
may then be
regarded as a homotopy with respect to the time  . Given a herd
. Given a herd  of solution
paths, we may then try to construct the system
of solution
paths, we may then try to construct the system  as usual and consider as a polynomial equation
on the
as usual and consider as a polynomial equation
on the  -dimensional solution
surface of this system. This more intrinsic technique is particularly
effective if
-dimensional solution
surface of this system. This more intrinsic technique is particularly
effective if  , in which case
we really have to compute the roots in a disk of a univariate analytic
equation. For
, in which case
we really have to compute the roots in a disk of a univariate analytic
equation. For  , the homotopy
, the homotopy
 does not need to be in general position, and we
have not yet worked out the corresponding theory in detail.
does not need to be in general position, and we
have not yet worked out the corresponding theory in detail.
Even if the coefficients of the system (11) are all rational or algebraic, then the computed solutions are only numeric approximations. For some applications, it is useful to have exact representations of the solutions. This allows for instance to check whether a given other polynomial with rational coefficients vanishes on the solution set or on some points of the solutions set.
The Kronecker representation provides one useful exact representation
for the set of solutions. Modulo a generic linear change of coordinates,
we may assume without loss of generality that for any distinct solutions
 of (11), their first coordinates
of (11), their first coordinates
 and
and  are also distinct.
Let
are also distinct.
Let  be the distinct solutions of (11).
Then the Kronecker representation for
be the distinct solutions of (11).
Then the Kronecker representation for  is the
unique -tuple
is the
unique -tuple  of univariate polynomials with
of univariate polynomials with  ,
,  ,
,  , such that
is annihilated by the system
, such that
is annihilated by the system
Assume now that  . Then we
notice that
. Then we
notice that  can be computed in terms of
can be computed in terms of  and
and  using
using

for all . This yields an
efficient dichotomic algorithm for the numeric computation of .
Assume now that (11) has rational coefficients and that we
have computed numeric approximations  of
of  with bit precision .
By remark 11, even if
with bit precision .
By remark 11, even if  approximates
a multiple root, then is still known with a
precision close to . Using
the above method, we may thus compute a numeric approximation
approximates
a multiple root, then is still known with a
precision close to . Using
the above method, we may thus compute a numeric approximation  of with an accuracy of
approximately bits. We apply rational number
reconstruction [GG02, Chapter 5] in order to provide a
guess for with rational coefficients. We may
check whether this guess is correct by evaluating
at
of with an accuracy of
approximately bits. We apply rational number
reconstruction [GG02, Chapter 5] in order to provide a
guess for with rational coefficients. We may
check whether this guess is correct by evaluating
at  over
over  .
By evaluating over suitable algebras with nilpotent elements, we may
check in a similar way whether the multiplicity of each root matches
with the numeric multiplicity. If one of these checks fails, then we
double the bit precision, use Newton's method to improve the
approximations , and keep
iterating.
.
By evaluating over suitable algebras with nilpotent elements, we may
check in a similar way whether the multiplicity of each root matches
with the numeric multiplicity. If one of these checks fails, then we
double the bit precision, use Newton's method to improve the
approximations , and keep
iterating.
Consider a cluster  of paths which tend to a
common root and decompose
of paths which tend to a
common root and decompose  such that
such that  is a herd in the cluster for each
is a herd in the cluster for each
 . Each herd
gives rise to an ideal
. Each herd
gives rise to an ideal  which is represented by a
system of the form (26). The intersection
which is represented by a
system of the form (26). The intersection

can be computed by Gröbner basis techniques and the limit  at yields the local ideal of the
system (11) at the multiple root.
at yields the local ideal of the
system (11) at the multiple root.
Example
with the homotopy

For small  , we have the
solution paths
, we have the
solution paths
Both  and
and  form a herd,
with corresponding ideals
form a herd,
with corresponding ideals

We have

and  .
.
G. Alefeld and J. Herzberger. Introduction to interval analysis. Academic Press, New York, 1983.
ANSI/IEEE. IEEE standard for binary floating-point arithmetic. Technical report, ANSI/IEEE, New York, 2008. ANSI-IEEE Standard 754-2008. Revision of IEEE 754-1985, approved on June 12, 2008 by IEEE Standards Board.
D. Bates, J. Hauenstein, A. Sommese, and C. Wampler. Bertini: Software for numerical algebraic geometry. http://www.nd.edu/~sommese/bertini/, 2006.
D.J. Bates, A.J. Sommese, J.D. Hauenstein, and C.W. Wampler. Adaptive multiprecision path tracking. SIAM Journal on Numerical Mathematics, 46(2):722–746, 2008.
C. Durvye. Algorithmes pour la décomposition primaire des idéaux polynomiaux de dimension nulle donnés en évaluation. PhD thesis, Univ. de Versailles (France), 2008.
J. von zur Gathen and J. Gerhard. Modern Computer Algebra. Cambridge University Press, 2-nd edition, 2002.
M. Giusti, K. Hägele, J. Heintz, J.E. Morais, J.L Monta na, and L.M. Pardo. Lower bounds for diophantine approximation. Journal of Pure and Applied Algebra, 117–118:277–317, 1997.
M. Giusti, J. Heintz, J.E. Morais, and L.M. Pardo. When polynomial equation systems can be solved fast? In G. Cohen, M. Giusti, and T. Mora, editors, Proc. AAECC'11, volume 948 of Lecture Notes in Computer Science. Springer Verlag, 1995.
G. Hanrot, V. Lefèvre, K. Ryde, and P. Zimmermann. MPFR, a C library for multiple-precision floating-point computations with exact rounding. http://www.mpfr.org, 2000.
L. Jaulin, M. Kieffer, O. Didrit, and E. Walter. Applied interval analysis. Springer, London, 2001.
R.B. Kearfott. An interval step control for continuation methods. SIAM J. Numer. Anal., 31(3):892–914, 1994.
R. Krawczyk. Newton-algorithmen zur bestimmung von nullstellen mit fehler-schranken. Computing, 4:187–201, 1969.
U.W. Kulisch. Computer Arithmetic and Validity. Theory, Implementation, and Applications. Number 33 in Studies in Mathematics. de Gruyter, 2008.
G. Lecerf. Une alternative aux méthodes de
réécriture pour la résolution des syst es algébriques.
PhD thesis, École polytechnique, 2001.
es algébriques.
PhD thesis, École polytechnique, 2001.
A. Leykin. NAG. http://www.math.uic.edu/~leykin/NAG4M2, 2009. Macaulay 2 package for numerical algebraic geometry.
K. Makino and M. Berz. Remainder differential algebras and their applications. In M. Berz, C. Bischof, G. Corliss, and A. Griewank, editors, Computational differentiation: techniques, applications and tools, pages 63–74, SIAM, Philadelphia, 1996.
K. Makino and M. Berz. Suppression of the wrapping effect by Taylor model-based validated integrators. Technical Report MSU Report MSUHEP 40910, Michigan State University, 2004.
R.E. Moore, R.B. Kearfott, and M.J. Cloud. Introduction to Interval Analysis. SIAM Press, 2009.
R.E. Moore. Interval Analysis. Prentice Hall, Englewood Cliffs, N.J., 1966.
A.P. Morgan. Solving polynomial systems using continuation for] engineering and scientific problems. Prentice-Hall, Englewood Cliffs, N.J., 1987.
A. Neumaier. Interval methods for systems of equations. Cambridge university press, Cambridge, 1990.
S.M. Rump. Kleine Fehlerschranken bei Matrixproblemen. PhD thesis, Universität Karlsruhe, 1980.
S.M. Rump. Verification methods: Rigorous results using floating-point arithmetic. Acta Numerica, 19:287–449, 2010.
A. Schönhage. The fundamental theorem of algebra in terms of computational complexity. Technical report, Math. Inst. Univ. of Tübingen, 1982.
A.J. Sommese and C.W. Wampler. The Numerical Solution of Systems of Polynomials Arising in Engineering and Science. World Scientific, 2005.
J. van der Hoeven. Ball arithmetic. Technical report, HAL, 2009. http://hal.archives-ouvertes.fr/hal-00432152/fr/.
J. van der Hoeven. Efficient root counting for analytic functions on a disk. Technical report, HAL, 2011. http://hal.archives-ouvertes.fr/hal-00583139/fr/.
J. Verschelde. Homotopy continuation methods for solving polynomial systems. PhD thesis, Katholieke Universiteit Leuven, 1996.
J. Verschelde. PHCpack: A general-purpose solver for polynomial systems by homotopy continuation. ACM Transactions on Mathematical Software, 25(2):251–276, 1999. Algorithm 795.

















 .
. and
and

 admits a root
admits a root 



 ,
, ,
, and let
and let