| Multi-point evaluation in higher dimensions |
|
| February 2, 2012 |
|
 . This work has
been partly supported by the French
. This work has
been partly supported by the French
 . This work has
also been supported by NSERC and the Canada Research Chairs
program.
. This work has
also been supported by NSERC and the Canada Research Chairs
program.
In this paper, we propose efficient new algorithms for
multi-dimensional multi-point evaluation and interpolation on
certain subsets of so called tensor product grids. These
point-sets naturally occur in the design of efficient
multiplication algorithms for finite-dimensional
|
The complexity of our algorithms will be measured by counting base field operations: we do not consider numerical issues (they may anyway be irrelevant, if e.g. our base field is a finite field), and do not discuss the choice of data structures or index manipulation issues.
From the complexity point of view, evaluation and interpolation are
rather well understood for polynomials in one variable: algorithms of
quasi-linear complexity are known to evaluate a polynomial of degree
less than  at points, and
conversely to interpolate it. The best known algorithms [BM74]
run in time
at points, and
conversely to interpolate it. The best known algorithms [BM74]
run in time  , and the main
remaining question is to close the gap between this and an optimal
, and the main
remaining question is to close the gap between this and an optimal  , if at all possible.
, if at all possible.
In several variables, the questions are substantially harder, due to the
variety of monomial bases and evaluation sets one may consider; no
quasi-linear time algorithm is known in general. In this paper,
following the terminology of [Sau04], we consider
evaluation points that are subgrids of tensor product grids. We
prove that for some suitable monomial bases, evaluation and
interpolation can both be done in time  ,
where
,
where  is the number of variables and
is the number of variables and  is the size of the evaluation set (and of the monomial
basis we consider). Remark that this result directly generalizes the
univariate case. In many cases, is logarithmic
in ; then, our result is
optimal, up to logarithmic factors.
is the size of the evaluation set (and of the monomial
basis we consider). Remark that this result directly generalizes the
univariate case. In many cases, is logarithmic
in ; then, our result is
optimal, up to logarithmic factors.
Moreover, for specific types of evaluation points, such as roots of
unity or points in a geometric progression, even faster algorithms can
be used in the univariate case, of time complexity  . These algorithms will also be generalized to
the multivariate case and result in evaluation and interpolation
algorithms of time complexity
. These algorithms will also be generalized to
the multivariate case and result in evaluation and interpolation
algorithms of time complexity  ,
where is the maximal partial degree. In
particular, given two dense multivariate polynomials in
variables of total degree
,
where is the maximal partial degree. In
particular, given two dense multivariate polynomials in
variables of total degree  can be multiplied in
time
can be multiplied in
time  . To the best of our
knowledge, this is the best currently available complexity bound for
this problem. We also expect the new algorithms to be efficient in
practice, although we have not implemented them yet.
. To the best of our
knowledge, this is the best currently available complexity bound for
this problem. We also expect the new algorithms to be efficient in
practice, although we have not implemented them yet.
 is a finite initial segment
for the partial ordering on
is a finite initial segment
for the partial ordering on  :
this means that if
:
this means that if  and
and  , then
, then  .
For instance, one may think of
.
For instance, one may think of  as the set of
standard monomials modulo a
as the set of
standard monomials modulo a  -dimensional
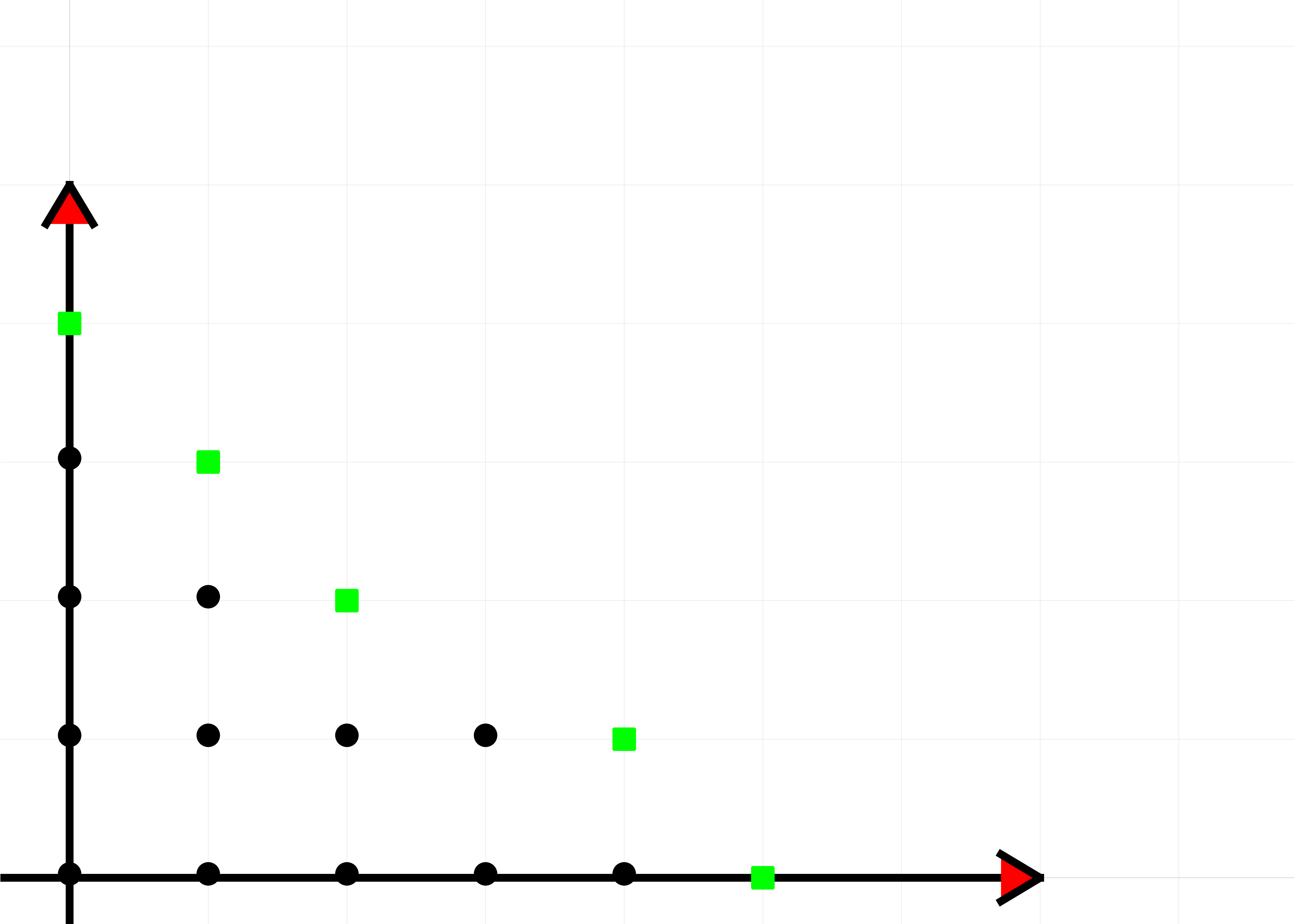
ideal, for a given monomial ordering. Figure 1 shows such
a set (black dots), as well as the minimal elements of
-dimensional
ideal, for a given monomial ordering. Figure 1 shows such
a set (black dots), as well as the minimal elements of  (green squares).
(green squares).
As a very particular example, for positive integers  , let
, let  denote the set
denote the set
 ; this is an -dimensional grid.
; this is an -dimensional grid.
The set will be used as an index set for both
the evaluation points and the monomial basis. Let  be our base field and let be such that
be our base field and let be such that  . For
. For  ,
assume that we are given pairwise distinct elements
,
assume that we are given pairwise distinct elements  ; we will denote by
; we will denote by  the
collection
the
collection  . To
. To  we associate the point
we associate the point  and we let
and we let
 : this will be our set of
evaluation points. Remark that
: this will be our set of
evaluation points. Remark that  is contained in
the “tensor product” grid
is contained in
the “tensor product” grid

For instance, if  for all
for all  , then
, then  and
and  .
.
Let further  be the polynomial ring in variables over
be the polynomial ring in variables over  ;
for
;
for  , we write
, we write  . Then,
. Then,  denotes the
-vector space of polynomials
denotes the
-vector space of polynomials
 with support in .
On the example of Figure 1, admits
the monomial basis
with support in .
On the example of Figure 1, admits
the monomial basis

Given a polynomial  , written
on the monomial basis, our problem of multidimensional multi-point
evaluation is the computation of the vector
, written
on the monomial basis, our problem of multidimensional multi-point
evaluation is the computation of the vector  .
.
Both the domain and the codomain  of the evaluation map are -vector
spaces of dimension , so it
makes sense to ask whether this map is invertible. Indeed, let
of the evaluation map are -vector
spaces of dimension , so it
makes sense to ask whether this map is invertible. Indeed, let  be the defining ideal of .
A result going back to Macaulay (see [Mor03] for a proof)
shows that the monomials
be the defining ideal of .
A result going back to Macaulay (see [Mor03] for a proof)
shows that the monomials  form a monomial basis
of
form a monomial basis
of  . As a consequence, the
former evaluation map is invertible; the inverse problem is an instance
of multivariate interpolation.
. As a consequence, the
former evaluation map is invertible; the inverse problem is an instance
of multivariate interpolation.
To obtain a quasi-linear result, we rely on the fast univariate
algorithms of [BM74]. In the special case where is the grid ,
Pan [Pan94] solves the multivariate problem by applying a
“tensored” form of the univariate algorithms, evaluating or
interpolating one variable after the other. The key contribution of our
paper is the use of a multivariate Newton basis, combined with fast
change of basis algorithms between the Newton basis and the monomial
basis; this will allow us to follow an approach similar to Pan's in our
more general situation. The Newton basis was already used in many
previous works on our interpolation problem [Wer80, Müh88], accompanied by divided differences computations:
we avoid divided differences, as they lead to quadratic time algorithms.
The results in this paper have a direct application to multivariate
power series multiplication. Let be as above,
and let  be the monomial ideal generated by
be the monomial ideal generated by  ; equivalently,
is generated by all minimal elements of .
Then, one is interested the complexity of multiplication modulo , that is, in
; equivalently,
is generated by all minimal elements of .
Then, one is interested the complexity of multiplication modulo , that is, in  . Suitable choices of
lead to total degree truncation (take
. Suitable choices of
lead to total degree truncation (take  , so
, so  ),
which is used in many forms of Newton-Hensel lifting, or partial
degree truncation (take
),
which is used in many forms of Newton-Hensel lifting, or partial
degree truncation (take  ,
so
,
so  ).
).
There is no known algorithm with quasi-linear cost for this question in general. Inspired by the sparse multiplication algorithm of [CKL89], Lecerf and Schost gave such an algorithm for total degree truncation [LS03]. It was extended to weighted total degree in [vdH02] and further improved from the bit-complexity point of view in [vdHL09]. Further speed-ups are possible in small dimensions, when using the Truncated Fourier Transform or TFT [vdH04, vdH05]. For more general truncation patterns, Schost [Sch05] introduced an algorithm based on deformation techniques that uses evaluation and interpolation of the form described in this paper. At the time of writing [Sch05], no efficient algorithm was known for evaluation and interpolation; the present paper fills this gap and completes the results of [Sch05].
 denote a
multiplication time function, in the sense that univariate polynomials
of degree less than can be multiplied in
denote a
multiplication time function, in the sense that univariate polynomials
of degree less than can be multiplied in  operations in .
As in [GG03], we impose the condition that
operations in .
As in [GG03], we impose the condition that  is an increasing function (and freely use all
consequences of this assumption), and we note that
is an increasing function (and freely use all
consequences of this assumption), and we note that  can be taken in
can be taken in  using the algorithm of [CK91].
using the algorithm of [CK91].
We will use big-Oh notation for expressions that depend on an unbounded
number of variables (e.g., for Lemma 6 below). In such
cases, the notation  means that there exists a
universal constant
means that there exists a
universal constant  such that for all and all , the
inequality
such that for all and all , the
inequality  holds.
holds.
This section describes some mostly classical algorithms for univariate
polynomials over . We denote
by  the set of univariate polynomials of degree
less than . Given pairwise
distinct points
the set of univariate polynomials of degree
less than . Given pairwise
distinct points  in ,
we write
in ,
we write  for
for  .
The polynomials
.
The polynomials  are called the Newton
basis associated to ;
they form a -basis of . For instance, for
are called the Newton
basis associated to ;
they form a -basis of . For instance, for  , we have
, we have  .
.
Because we will have to switch frequently between the monomial and the
Newton bases, it will be convenient to use the notation  , for
, for  ,
with
,
with

We write  to indicate that a polynomial
to indicate that a polynomial  is written on the basis
is written on the basis  ;
remember that when no value
;
remember that when no value  is mentioned in
subscript, we are working in the Newton basis.
is mentioned in
subscript, we are working in the Newton basis.
The following classical lemma [BP94, Ex. 15 p. 67] gives complexity estimates for conversion between these bases.
Evaluation and interpolation in the monomial basis can be done in time
 , by the algorithms of [BM74]; combining this to the previous lemma, we obtain a
similar estimate for evaluation and interpolation with respect to the
Newton basis.
, by the algorithms of [BM74]; combining this to the previous lemma, we obtain a
similar estimate for evaluation and interpolation with respect to the
Newton basis.
If the points  are in geometric progression, we
may remove a factor
are in geometric progression, we
may remove a factor  in all estimates. Indeed,
under these assumptions, the conversions of Lemma 1 and the
evaluation or interpolation of Lemma 2 take time
in all estimates. Indeed,
under these assumptions, the conversions of Lemma 1 and the
evaluation or interpolation of Lemma 2 take time  [BS05]. The following subsection studies in
detail another particular case, TFT (Truncated Fourier Transform)
points. In this case we may also remove the factor
in all estimates, but the constant factor is even better than for points
in geometric progression.
[BS05]. The following subsection studies in
detail another particular case, TFT (Truncated Fourier Transform)
points. In this case we may also remove the factor
in all estimates, but the constant factor is even better than for points
in geometric progression.
In this subsection, we are going to assume that
contains suitable roots of unity, and prove refined complexity bounds
for such points.
Let be as above, let  be
the smallest integer such that
be
the smallest integer such that  and let us
suppose that contains a primitive
and let us
suppose that contains a primitive  -th root of unity
-th root of unity  .
The TFT points are
.
The TFT points are  , for
, for
 , where
, where  is the binary
is the binary  -bits mirror of
-bits mirror of
 . In other words, they form
an initial segment of length for the sequence of
-th roots of unity written in
the bit-reverse order; when for instance
. In other words, they form
an initial segment of length for the sequence of
-th roots of unity written in
the bit-reverse order; when for instance  and
and
 , these points are
, these points are  . In this subsection, these points
are fixed, so we drop the subscript
. In this subsection, these points
are fixed, so we drop the subscript  in our
notation.
in our
notation.
It is known [vdH04, vdH05] that in the
monomial basis, evaluation and interpolation at the TFT points can be
done in time  . Precisely,
both operations can be done using
. Precisely,
both operations can be done using  shifted
additions and subtractions and
shifted
additions and subtractions and  multiplications
by powers of . Here we recall
that a shifted addition (resp. subtraction) is a classical addition
(resp. subtraction) where any of the inputs may be premultiplied by
multiplications
by powers of . Here we recall
that a shifted addition (resp. subtraction) is a classical addition
(resp. subtraction) where any of the inputs may be premultiplied by  or
or  (e.g.,
(e.g.,  ). In the most interesting case
). In the most interesting case  , the TFT roughly saves a factor of 2 over the
classical FFT; this makes it a very useful tool for e.g. polynomial
multiplication.
, the TFT roughly saves a factor of 2 over the
classical FFT; this makes it a very useful tool for e.g. polynomial
multiplication.
We will show here that similar results hold for the conversion between
the monomial and Newton bases. First, we give the basis of the algorithm
by assuming that  , so that
, so that
 . Such a polynomial can be
written in the monomial, resp. Newton basis, as
. Such a polynomial can be
written in the monomial, resp. Newton basis, as

For  , let us introduce the
polynomials
, let us introduce the
polynomials  , all of degree
less than
, all of degree
less than  , such that
, such that
 |
(1) |
Thus,  for
for  and
and  , whereas
, whereas  for
for  .
.
 and
and  ,
we have
,
we have

Proof. This follows by grouping the terms of
indices  and
and  in
in  , the following equality holds:
, the following equality holds:

Indeed, for all even  ,
,  ; thus, the left-hand side is the
product of all
; thus, the left-hand side is the
product of all  , for
, for  . The claim follows by writing
. The claim follows by writing
 , observing that
, observing that  .
.
The previous lemma implies an algorithm of complexity  that takes as input the coefficients
that takes as input the coefficients  on the
Newton basis, and outputs
on the
Newton basis, and outputs  on the monomial basis.
It suffices to compute all polynomials
on the monomial basis.
It suffices to compute all polynomials  (on the
monomial basis) by means of the recursive formula. Computing from
(on the
monomial basis) by means of the recursive formula. Computing from  and
and  takes additions and
multiplications by powers of ,
so going from index
takes additions and
multiplications by powers of ,
so going from index  to
to  takes a total of
takes a total of  additions and
additions and  multiplications. The inverse conversion takes time
as well, since knowing
multiplications. The inverse conversion takes time
as well, since knowing  , we
can recover first for free as the high-degree
terms of , then using additions and multiplications.
, we
can recover first for free as the high-degree
terms of , then using additions and multiplications.
The conversion algorithm from the Newton to the monomial basis can be
depicted as follows, in the case  ,
,
 . The flow of the algorithm
goes down, from to
. The flow of the algorithm
goes down, from to  ;
the th row contains the 16
coefficients of the polynomials
;
the th row contains the 16
coefficients of the polynomials  (on the monomial
basis), in that order, and each oblique line corresponds to a
multiplication by a root of unity. The algorithm does only
“half-butterflies”, compared to the FFT algorithm.
(on the monomial
basis), in that order, and each oblique line corresponds to a
multiplication by a root of unity. The algorithm does only
“half-butterflies”, compared to the FFT algorithm.
If we assume that  , we will
be able to avoid useless computations, by keeping track of the zero
coefficients in the polynomials
, we will
be able to avoid useless computations, by keeping track of the zero
coefficients in the polynomials  .
The next figure shows the situation for
.
The next figure shows the situation for  ;
this is similar to what happens in van der Hoeven's TFT algorithm, but
much simpler (here, at each level, we can easily locate the zero
coefficients).
;
this is similar to what happens in van der Hoeven's TFT algorithm, but
much simpler (here, at each level, we can easily locate the zero
coefficients).
The pseudo-codes for the conversion from Newton basis to monomial basis and the inverse transformation are as follows:
Algorithm TFT-Newton-to-Monomial
 of
length
of
length  that contains the coefficients
that contains the coefficients  w.r.t. the Newton basis
w.r.t. the Newton basis
now contains the coefficients  w.r.t. the monomial basis
w.r.t. the monomial basis
for
 ,
, 
for 
for 

for 
Algorithm TFT-Monomial-to-Newton
of
length that contains the coefficients w.r.t. the monomial basis
now contains the coefficients
w.r.t. the Newton basis
for 
,
for
for

for
We deduce the following complexity result for the conversions, which
refines Lemma 1; it is of the form , with a tight control on the constants.
,
given  , one can compute
, one can compute
 using
using  additions or
subtractions, and multiplications by roots of
unity, with .
additions or
subtractions, and multiplications by roots of
unity, with .
Proof. For any given  , we do
, we do  additions/subtractions and multiplications. This is at most
additions/subtractions and multiplications. This is at most  .
.
The equivalent of Lemma 2 for the TFT points comes by using van der Hoeven's TFT algorithms for evaluation and interpolation on the monomial basis, instead of the general algorithms.
Let be a finite initial segment and let  be such that is contained in
. We present here some
geometric operations on that will be useful for
the evaluation and interpolation algorithms.
be such that is contained in
. We present here some
geometric operations on that will be useful for
the evaluation and interpolation algorithms.
 the projection
the projection

of on the  -coordinate
plane. For
-coordinate
plane. For  in
in  ,
we let
,
we let  be the unique integer such that
be the unique integer such that  and
and  . In
particular,
. In
particular,  holds for all .
holds for all .
In Figure 1, we have  ;
consists of the points of ordinates
;
consists of the points of ordinates  on the vertical axis, with
on the vertical axis, with  ,
,
 ,
,  and
and
 .
.
Finally, if  is a collection of points as defined
in the introduction, with
is a collection of points as defined
in the introduction, with  for all
for all  , then we will write
, then we will write  .
.
 , we let
, we let  be the section
be the section

and we let  be the projection of
on the -coordinate plane. In
other words,
be the projection of
on the -coordinate plane. In
other words,  is in if
and only if
is in if
and only if  is in .
We have the following equivalent definition
is in .
We have the following equivalent definition

Because the sets form a partition of , we deduce the equality  . Notice also that all are initial segments in
. Notice also that all are initial segments in  .
In Figure 1, we have
.
In Figure 1, we have  ,
,
 ,
,  ,
,  and
and  .
.
From now on, we focus on multivariate polynomials. In all this section,
we fix a finite initial segment and such that .
Naturally, polynomials in may be written in the
monomial basis  , but we may
also use the multivariate Newton basis
, but we may
also use the multivariate Newton basis  ,
defined by
,
defined by

Generalizing the univariate notation, given  , we will consider a mixed monomial-Newton basis
, we will consider a mixed monomial-Newton basis
 with
with

As in the univariate case, we will write  to
indicate that is written on the corresponding
basis.
to
indicate that is written on the corresponding
basis.
It will be useful to rely on the following decomposition. Let be in  , written
on the basis . Collecting
coefficients, we obtain
, written
on the basis . Collecting
coefficients, we obtain
 |
(2) |
with  and
and
 |
(3) |
Keep in mind that if the indices  and
and  are omitted, we are using the Newton basis.
are omitted, we are using the Newton basis.
 be in
be in  ,
and let
,
and let  be obtained by replacing
be obtained by replacing  by
by  in , for some in
in , for some in  . Let
. Let  be in
be in  . Given , one can compute
. Given , one can compute  in
time
in
time
Proof. Using a permutation of coordinates, we
reduce to the case when  .
Using the above notations, it suffices to convert
.
Using the above notations, it suffices to convert  from the basis
from the basis  to the basis
to the basis  for all
for all  . By Lemma 1,
each conversion can be done in time
. By Lemma 1,
each conversion can be done in time  ,
so the total cost is
,
so the total cost is

Since the function  is increasing, we get the
upper bound
is increasing, we get the
upper bound

the conclusion follows from the equality  .
.
Let us write  and
and  ,
where both vectors have length .
Then, the basis
,
where both vectors have length .
Then, the basis  is the monomial basis, whereas
the basis
is the monomial basis, whereas
the basis  is the Newton basis. Changing one
coordinate at a time, we obtain the following corollary, which shows how
to convert from the monomial basis to the Newton basis, and back.
is the Newton basis. Changing one
coordinate at a time, we obtain the following corollary, which shows how
to convert from the monomial basis to the Newton basis, and back.
The remarks in Section 2 about special families of points
apply here as well: if the points in have
special properties (e.g.,  is in geometric
progression, or the are TFT points), the cost
may be reduced (both in the geometric case and in the TFT case, we may
save the factors
is in geometric
progression, or the are TFT points), the cost
may be reduced (both in the geometric case and in the TFT case, we may
save the factors  ).
).
We are now in a position to state and prove our main result.
 such that , with written on the
monomial basis of
such that , with written on the
monomial basis of  , one can
evaluate at in time
, one can
evaluate at in time

Conversely, given the values of at , one can compute the
representation of on the monomial basis of
with the same cost.
Using the bound  , and the
fact that
, and the
fact that  holds for all , we deduce the simplified bound
claimed in the introduction. Remark also that our result matches the
cost of the algorithm of [Pan94], which applies in the
special case of evaluation-interpolation at a grid.
holds for all , we deduce the simplified bound
claimed in the introduction. Remark also that our result matches the
cost of the algorithm of [Pan94], which applies in the
special case of evaluation-interpolation at a grid.
The input to the evaluation algorithm is given
on the monomial basis of ;
however, internally to the algorithm, we use the Newton basis. Thus,
before entering the (recursive) evaluation algorithm, we switch once and
for all to the Newton basis; this does not harm complexity, in view of
Lemma 6. Similarly, the interpolation algorithm uses the
Newton basis, so we convert the result to the monomial basis after we
have completed the interpolation.
Remark also that if the points  are in geometric
progression for each , then
one may eliminate the factors from the
complexity bound. Using TFT evaluation points allows for similar
reductions.
are in geometric
progression for each , then
one may eliminate the factors from the
complexity bound. Using TFT evaluation points allows for similar
reductions.
The algorithm follows a pattern similar to Pan's multivariate evaluation
and interpolation at a grid [Pan94]: e.g. for evaluation,
we evaluate at the fibers above each ,
and proceed recursively with polynomials obtained from the sections
. Using the Newton basis
allows us to alleviate the issues coming from the fact that is not a grid.
Let  be written (in the Newton basis) as in the
previous section:
be written (in the Newton basis) as in the
previous section:

where we write and
To , we associate the  -variate polynomial
-variate polynomial

The key to our algorithms is the following proposition.
Proof. First, we make both quantities explicit. The left-hand side is given by

whereas the right-hand side is

where in both cases we write .
Thus, to conclude, it is enough to prove that, for  , we have
, we have  .
.
Indeed, recall that the assumption implies  . On the other hand, we have
. On the other hand, we have  , whence the inequality
, whence the inequality  , where we write
, where we write  . In particular, we deduce
. In particular, we deduce  , which in turn implies that
, which in turn implies that  . Thus, there exists
. Thus, there exists  such that
such that  . This implies that
. This implies that
 , as requested.
, as requested.
Given  , with
written in the Newton basis ,
we show here how evaluate at . The algorithm is the following.
, with
written in the Newton basis ,
we show here how evaluate at . The algorithm is the following.
If  ,
is a constant; we return it unchanged.
,
is a constant; we return it unchanged.
Otherwise, we compute all values  ,
for and
,
for and  ,
by applying the fast univariate evaluation algorithm to each
,
by applying the fast univariate evaluation algorithm to each  . For
. For  , and for
, and for  ,
we have (by definition)
,
we have (by definition)  ,
so we have all the information we need to form the polynomial
,
so we have all the information we need to form the polynomial  . Then, we evaluate recursively
each
. Then, we evaluate recursively
each  at
at  ,
for .
,
for .
at in time
Proof. Correctness follows directly from
Proposition 8, so we can focus on the cost analysis. Let
 denote the cost of this algorithm. The former
discussion shows that
denote the cost of this algorithm. The former
discussion shows that  and that
is the sum of two contributions:
and that
is the sum of two contributions:
the cost of computing all values ,
for and
the cost of the recursive calls on  for .
for .
Lemma 2 shows that the former admits the upper bound

as in the proof of Lemma 5, this can be bounded by
As to the recursive calls, notice that all are
contained in , which is
contained in  . Thus, for some
constant
. Thus, for some
constant  , we obtain the
inequality
, we obtain the
inequality
 |
(4) |
To conclude, we prove that for all  ,
for all and for any initial segment , we have
,
for all and for any initial segment , we have
 |
(5) |
Such an inequality clearly holds for  .
Assume by induction on that for any
.
Assume by induction on that for any  and any initial segment
and any initial segment  ,
we have
,
we have
 |
(6) |
To prove (5), we substitute (6) in (4), to get

Since  , we are done.
, we are done.
The interpolation algorithm is obtained by reversing step-by-step the
evaluation algorithm. On input, we take  ,
with
,
with  ; the output is the
unique polynomial
; the output is the
unique polynomial  such that
such that  for all .
for all .
If ,  consists of a single entry; we return it unchanged.
consists of a single entry; we return it unchanged.
Otherwise, we recover recursively all ,
for . This is made
possible by Proposition 8, which shows that we actually
know the values of each at the corresponding
. Knowing all gives us the values for all
and .
It suffices to interpolate each on the
Newton basis  to conclude.
to conclude.
Correctness of this algorithm is clear and the following complexity bound is proved in a similar way as in the case of evaluation.
in time
We conclude with an application of our results to the multiplication of
polynomials and power series. Let and be as above. We let  ,
as we assume that has cardinality at least , so that we can find , where
,
as we assume that has cardinality at least , so that we can find , where  consists of
pairwise distinct entries in .
Let
consists of
pairwise distinct entries in .
Let  , so that
, so that  .
.
We discuss here the case when we want to multiply two polynomials  and
and  with
with  . In this case, we may use a simple
evaluation-interpolation strategy.
. In this case, we may use a simple
evaluation-interpolation strategy.
Perform multi-point evaluations of  and
and  at
at  ;
;
Compute the componentwise product of the evaluations;
Interpolate the result at to yield the
product  .
.
By Theorem 7, this can be done in time

If admits at least
points in geometric progression (or at least TFT
points), then the factor may be removed. This
result should be compared to the algorithm of [CKL89],
which has complexity  ; that
algorithm applies to more general monomial supports, but under more
restrictive conditions on the base field.
; that
algorithm applies to more general monomial supports, but under more
restrictive conditions on the base field.
Let now be the monomial ideal generated by . We discuss here the complexity of
multiplication modulo in . To
our knowledge, no general algorithm with a complexity quasi-linear in
is known.
Let us first recall an algorithm of [Sch05] and show how
our results enable us to improve it. Theorem 1 of [Sch05]
gives an algorithm for multiplication in ,
that relies on the following operations:
 multi-point evaluations at
of polynomials in ;
multi-point evaluations at
of polynomials in ;
univariate power series multiplication in
precision ;
interpolations at of
polynomials in .
The paper [Sch05] does not specify how to do the evaluation and interpolation (for lack of an efficient solution); using our results, it becomes possible to fill all the gaps in this algorithm. Applying Theorem 7, without doing any simplification, we obtain a cost of

Using the inequality  , this
gives the upper bound
, this
gives the upper bound  . If we
can take at least points in geometric
progression in (or at least
TFT points), then the upper bound reduces to
. If we
can take at least points in geometric
progression in (or at least
TFT points), then the upper bound reduces to  .
.
The most important case of truncated power series multiplication is when
we truncate with respect to the total degree. In other words, we take
 . In that case, several
alternative strategies to the one of the former subsection are available
[LS03, vdH04, vdH05, vdHL09],
and we refer to [vdH05, vdHL09] for some
benchmarks.
. In that case, several
alternative strategies to the one of the former subsection are available
[LS03, vdH04, vdH05, vdHL09],
and we refer to [vdH05, vdHL09] for some
benchmarks.
As it turns out, one can apply the result from Section 6.1,
in the special case of polynomials supported in total degree, to improve
these algorithms, when admits at least points in geometric progression (or at least TFT points). Indeed, the algorithms from [LS03,
vdHL09] rely on multivariate polynomial multiplication.
Using the result of Section 6.1 in these algorithms
(instead of sparse polynomial multiplication), we obtain a new algorithm
of time complexity  instead of
instead of  . For constant ,
this removes a factor
. For constant ,
this removes a factor  from the asymptotic time
complexity.
from the asymptotic time
complexity.
To finish, we would like to point out that the present paper almost repairs an error in [vdH04, Section 5], which was first announced in [vdH05]. Indeed, it was implicitly, but mistakenly, assumed that Proposition 8 also holds for monomial bases. The present “fix” simply consists of converting to the Newton basis before evaluating, and similarly for the inverse. The asymptotic time complexity analysis from [vdH04, Section 5] actually remains valid up to a small but non trivial constant factor. When using TFT transforms in combination with the algorithms from section 2.2, we expect the constant factor to be comprised between one and three in practice.
A. Borodin and R. T. Moenck. Fast modular transforms. Journal of Computer and System Sciences, 8:366–386, 1974.
D. Bini and V. Y. Pan. Polynomial and matrix computations. Vol. 1. Birkhäuser Boston Inc., Boston, MA, 1994. Fundamental algorithms.
A. Bostan and É. Schost. Polynomial evaluation and interpolation on special sets of points. Journal of Complexity, 21(4):420–446, 2005.
D. G. Cantor and E. Kaltofen. On fast multiplication of polynomials over arbitrary algebras. Acta Informatica, 28(7):693–701, 1991.
J. Canny, E. Kaltofen, and Y. Lakshman. Solving systems of non-linear polynomial equations faster. In G. Gonnet, editor, ISSAC '89, pages 121–128, Portland, Oregon, 1989. ACM.
J. von zur Gathen and J. Gerhard. Modern Computer Algebra. Cambridge University Press, 2-nd edition, 2003.
G. Lecerf and É. Schost. Fast multivariate power series multiplication in characteristic zero. SADIO Electronic Journal on Informatics and Operations Research, 5(1):1–10, September 2003.
F. Mora. De nugis Groebnerialium 2: Applying Macaulay's trick in order to easily write a Gröbner basis. Applicable Algebra in Engineering, Communication and Computing, 13(6):437–446, 2003.
G. Mühlbach. On multivariate interpolation by generalized polynomials on subsets of grids. Computing, 40(3):201–215, 1988.
V. Pan. Simple multivariate polynomial multiplication. Journal of Symbolic Computation, 18(3):183–186, 1994.
T. Sauer. Lagrange interpolation on subgrids of tensor product grids. Mathematics of Computation, 73(245):181–190, 2004.
É. Schost. Multivariate power series multiplication. In M. Kauers, editor, ISSAC '05, pages 293–300, New York, NY, USA, 2005. ACM.
J. van der Hoeven. Relax, but don't be too lazy. Journal of Symbolic Computation, 34:479–542, 2002.
J. van der Hoeven. The truncated Fourier transform and applications. In J. Gutierrez, editor, ISSAC '04, pages 290–296, Univ. of Cantabria, Santander, Spain, July 4–7 2004. ACM.
J. van der Hoeven. Notes on the Truncated Fourier Transform. Technical Report 2005-5, Université Paris-Sud, Orsay, France, 2005.
J. van der Hoeven and G. Lecerf. On the bit-complexity of sparse polynomial multiplication. Technical Report http://arxiv.org/abs/0901.4323v1, Arxiv, 2009.
H. Werner. Remarks on Newton type multivariate interpolation for subsets of grids. Computing, 25(2):181–191, 1980.
 ,
, is
generated by monomials of the form
is
generated by monomials of the form  ;
; .
. of the above form.
of the above form.
 in
time
in
time  ,
,
 ,
, in time
in time
 ,
,