 be the real field
of grid-based transseries in
be the real field
of grid-based transseries in  and let
and let  be a differential polynomial with coefficients in . Then, given transseries
be a differential polynomial with coefficients in . Then, given transseries  with
with  and
and  , there exists a
, there exists a  with
with  and
and  .
.
|
Abstract
In our PhD. we have given an algorithm for the algebraic resolution of algebraic differential equations with real transseries coefficients. Unfortunately, not all equations do admit solutions in this strongly monotonic setting, even though we recently proved an intermediate value theorem.
In this paper we show that the algorithm from our PhD. generalizes to the setting of weakly oscillatory or complex transseries. Modulo a finite number of case separations, we show how to determine the solutions of an arbitrary algebraic differential equation over the complex transseries. We will show that such equations always admit complex transseries solutions. However, the field of complex transseries is not differentially algebraically closed.
In [vdH97], we have studied the asymptotic behaviour of solutions to algebraic differential equations in the setting of strongly monotonic or real transseries. We have given a theoretical algorithm to find all such solutions, which is actually effective for suitable subclasses of transseries. More recently, we have proved the following “differential intermediate value theorem”.
Theorem be the real field
of grid-based transseries in and let be a differential polynomial with coefficients in . Then, given transseries with and , there exists a with and .
This theorem implies in particular that any algebraic differential equation of odd degree, such as

has at least one real transseries solution. This theorem is striking in the sense that it suggests the existence of theories of ordered and/or valuated differential algebra.
However, a main drawback of the setting of real transseries, is that not
every algebraic differential equation can be solved; actually, even an
equation like  has no solutions. In order to get
a better understanding of the asymptotic behaviour of solutions to
algebraic differential equations, it is therefore necessary to search
for a complex analogue of the theory of real transseries. This paper is
a first contribution in this direction.
has no solutions. In order to get
a better understanding of the asymptotic behaviour of solutions to
algebraic differential equations, it is therefore necessary to search
for a complex analogue of the theory of real transseries. This paper is
a first contribution in this direction.
The first problem is to actually define complex transseries. The
difficulty is that it is not clear a priori whether an expression
like  should be seen as an infinitely large or an
infinitely small transmonomial. Several approaches can be followed. A
first approach, based on pointwise algebras, was already described in
chapter 6 of [vdH97]. However, this approach has the
drawback that it is not easy to compute with complex transseries.
should be seen as an infinitely large or an
infinitely small transmonomial. Several approaches can be followed. A
first approach, based on pointwise algebras, was already described in
chapter 6 of [vdH97]. However, this approach has the
drawback that it is not easy to compute with complex transseries.
A second more computational approach is described in section 3.
Roughly speaking, it is based on the observation that all computations
with complex transseries can be done in a similar way as in the real
setting, except for testing whether a monomial like
is infinitely large or small. Now whenever we have to make such a
choice, we will actually consider both cases, by applying the automatic
case separation strategy (see [vdH97]). We implicitly
reject the case when is bounded, which is
“degenerate”, but which deserves to be studied later.
The last approach, which is described in section 2, is more
structural and really allows us to define a complex transseries in a not
too difficult way. The underlying idea is analogue to the concept of a
maximal ideal. Intuitively speaking, we assume the existence of some
“god”, who has decided a priori for us which
monomials like are infinitely large and which
ones are infinitely small. It turns out that all possible choices lead
to isomorphic fields of transseries. However, the geometric significance
of these fields is hard to grasp.
In section 4, we introduce parameterized complex transseries, which are necessary to express generic solutions to differential equations. Indeed, such solutions may involve integration constants. As usual, our approach is based on the automatic case separation strategy.
The remaining sections deal with the resolution of asymptotic algebraic
differential equations with complex transseries coefficients. Our
approach is similar to the one followed in [vdH97], but we
have made a few simplifications and we corrected an error (see section
9.4). Our main results are stated in sections 9.1
and 9.2. We show that there exists a theoretical algorithm
to express the generic solution to an algebraic differential equation by
means of parameterized complex transseries and we give a bound for the
logarithmic depth of the generic solution. We also show that an
algebraic differential equation of degree  admits
at least complex transseries solutions when
counting with multiplicities. As a consequence, each linear differential
equation admits a full system of solutions. However, our fields of
complex transseries are not differentially algebraically closed and
several interesting problems still need to be solved (see section 9.5).
admits
at least complex transseries solutions when
counting with multiplicities. As a consequence, each linear differential
equation admits a full system of solutions. However, our fields of
complex transseries are not differentially algebraically closed and
several interesting problems still need to be solved (see section 9.5).
The reader should be aware of a few changes in notations w.r.t. [vdH97], which are summarized in the following table:

In all what follows, let  be a real
trigonometric field and
be a real
trigonometric field and  its
complexification. This means that has the
structure of a totally ordered field and functions
its
complexification. This means that has the
structure of a totally ordered field and functions  , which are compatible with this ordering.
, which are compatible with this ordering.
More precisely, we assume that  admits an inverse
function
admits an inverse
function  with domain
with domain  and
that the function
and
that the function  restricted to
restricted to  admits a totally defined inverse. Here
admits a totally defined inverse. Here  ,
where
,
where  and
and  .
Furthermore,
.
Furthermore,

for all  . Finally, for each
. Finally, for each
 resp.
resp.  and
and  , we require that
, we require that

Proposition  form a real trigonometric field.
form a real trigonometric field.
Proof. The functional equations are classical. The
inequality for  was first proved in [DW84].
As to the inequality for
was first proved in [DW84].
As to the inequality for  , we
have
, we
have

if  . Otherwise,
. Otherwise,

since  .
.
Remark  and for expansions at order
and for expansions at order
 instead of
instead of  .
.
Remark  and
and  may naturally be
extended to
may naturally be
extended to  , numbers in may naturally be written in polar form, etc.
, numbers in may naturally be written in polar form, etc.
Remark and are no
longer required to be total and the functional equations resp.
inequalities are only required to hold, whenever they make sense. For
instance, if  , then we
require that
, then we
require that  and
and  .
.
Let  be a totally ordered monomial group (or set)
with -powers. Then we recall
that the field
be a totally ordered monomial group (or set)
with -powers. Then we recall
that the field  of grid-based power series is
naturally totally ordered by
of grid-based power series is
naturally totally ordered by  ,
for all
,
for all  . This ordering is
compatible with the multiplication:
. This ordering is
compatible with the multiplication:  .
More generally, if is only partially ordered,
then we define an ordering on to be
compatible with the asymptotic ordering on , if
.
More generally, if is only partially ordered,
then we define an ordering on to be
compatible with the asymptotic ordering on , if
 |
(1) |
for all  .
.
In what follows, we are rather interested in the complexification  of .
Obviously, this
of .
Obviously, this  -algebra can
not be given an ordering which is compatible with the multiplication.
Nevertheless, it is interesting to consider orderings on which are only compatible with the -algebra structure of .
Such an ordering is again said to be compatible with the asymptotic
ordering on , if (1)
holds for all .
-algebra can
not be given an ordering which is compatible with the multiplication.
Nevertheless, it is interesting to consider orderings on which are only compatible with the -algebra structure of .
Such an ordering is again said to be compatible with the asymptotic
ordering on , if (1)
holds for all .
Assuming that such orderings on and are total, the condition (1) implies that
 for all non zero
for all non zero  .
Consequently, the ordering on is totally
determined by the sets
.
Consequently, the ordering on is totally
determined by the sets

where  runs over .
Each
runs over .
Each  is actually the set of strictly positive
elements of a total ordering on ,
which is compatible with the -module
structure of . Therefore,
each is characterized by an angle
is actually the set of strictly positive
elements of a total ordering on ,
which is compatible with the -module
structure of . Therefore,
each is characterized by an angle  and a direction
and a direction  ,
via
,
via

This situation is illustrated in figure 1.
In is also possible to consider complex powers of monomials: a
complex monomial group is a monomial group
with -powers, with an
asymptotic ordering  which is compatible with the
expo-linear -vector space
structure of . For instance
the formal group
which is compatible with the
expo-linear -vector space
structure of . For instance
the formal group  is a monomial group with
is a monomial group with  -powers for the ordering
-powers for the ordering  . This group is not totally
ordered, since
. This group is not totally
ordered, since  and
and  are
incomparable. We may make the ordering total by deciding that
are
incomparable. We may make the ordering total by deciding that  .
.
Now consider a totally ordered grid-based algebra of the form  , where is
a totally ordered complex monomial group, and where the ordering on
, where is
a totally ordered complex monomial group, and where the ordering on  is assumed to be compatible with the asymptotic
ordering on . Assume that we
also have a partial logarithmic function on
, such that
is assumed to be compatible with the asymptotic
ordering on . Assume that we
also have a partial logarithmic function on
, such that
coincides with the usual logarithm on
;
If  , then
, then  and
and  .
.
We say that is a pre-field of complex
transseries if the following conditions are satisfied:
 ;
;
 , for all
, for all  ;
;
For all  , we have
, we have  , where
, where  ,
,
as well as the following conditions for the logarithm:
 for all and
for all and  ;
;
 for all
for all  ;
;
 for all
for all  .
.
In L5, we write  , if
and only if
, if
and only if  for all
for all  . In view of L3, this means that
. In view of L3, this means that  for all
for all  .
.
Remark  should be a logarithmic function in the definition of real fields of
transseries. It can indeed be checked that our conditions are
equivalent to the usual conditions on in
this case.
should be a logarithmic function in the definition of real fields of
transseries. It can indeed be checked that our conditions are
equivalent to the usual conditions on in
this case.
Remark may be further extended, by
setting  for all
for all  ,
where
,
where  is defined using the
is defined using the  function on . Of course, such
an extension of the logarithm to involves a
choice of a principal determination. Furthermore, such an extension
cannot satisfy both the properties L1 and L2.
function on . Of course, such
an extension of the logarithm to involves a
choice of a principal determination. Furthermore, such an extension
cannot satisfy both the properties L1 and L2.
On the other hand, the partial inverse of may be extended canonically in such a way that the
equation  admits a solution for each
admits a solution for each  . Indeed, it suffices to extend via
. Indeed, it suffices to extend via  for all
for all  and
and  . In what follows, we
will always assume that the partial inverse of
has been extended in this way.
. In what follows, we
will always assume that the partial inverse of
has been extended in this way.
Consider the formal -vector
space  generated by the formal symbols
generated by the formal symbols  . Given angles
. Given angles  and directions
and directions  , we define a
total ordering on
, we define a
total ordering on  as explained in section 2.2. Then the formal exponential
as explained in section 2.2. Then the formal exponential  of
is a complex monomial group for the asymptotic
ordering defined by
of
is a complex monomial group for the asymptotic
ordering defined by  , where
, where  .
In order to avoid confusion, we will sometimes write
.
In order to avoid confusion, we will sometimes write  instead of
instead of  .
.
Assume from now on that  and
and  were chosen such that
were chosen such that  . Given
a non-zero grid-based series
. Given
a non-zero grid-based series  with
with  , we define its logarithm by
, we define its logarithm by

We may extend the total ordering on  to
to  in a similar way as in section 2.2, by
extending the angle and direction families resp.
into larger families
in a similar way as in section 2.2, by
extending the angle and direction families resp.
into larger families  resp.
resp.  . It is easily verified
that the field
. It is easily verified
that the field  with this ordering is a pre-field
of complex transseries.
with this ordering is a pre-field
of complex transseries.
Actually, the structure of  does not really
depend on the choices of ,
, and
, modulo rotations and
conjugations. Indeed, assume that
does not really
depend on the choices of ,
, and
, modulo rotations and
conjugations. Indeed, assume that  and
and  are a second family of angles and directions with indices
in
are a second family of angles and directions with indices
in  . Then we define an
increasing isomorphism
. Then we define an
increasing isomorphism  between
between  and
and  by
by

where
for all  . We infer that
. We infer that  is an isomorphism of complex monomial groups. Now if
is an isomorphism of complex monomial groups. Now if
 and
and  are families of
angles resp. directions with indices in ,
and which extend and , then we define an increasing isomorphism
are families of
angles resp. directions with indices in ,
and which extend and , then we define an increasing isomorphism  between and
between and  by
by
 |
(2) |
We notice that extends
if and only if  , which is
again equivalent to the condition that for each
, which is
again equivalent to the condition that for each  we have
we have

In this case, we say that  and
and  are strongly compatible. We say that and
are compatible if the relation holds for
all
are strongly compatible. We say that and
are compatible if the relation holds for
all  with sufficiently large
with sufficiently large  .
.
Assume now that we are given a complex field of transseries , which is not stable under exponentiation
(modulo the extension of the exponentiation as described in remark 7). Let and be
the associated families of angles and directions. Now consider the
formal complex monomial group
whose asymptotic ordering is given by  ,
for all
,
for all  . Given extensions
. Given extensions
 and
and  of
and to families indexed by monomials in
of
and to families indexed by monomials in  , we may totally order
, we may totally order  as explained in section 2.2. It is easily
verified that
as explained in section 2.2. It is easily
verified that  is a pre-field of complex
transseries, which we call the exponential extension of , relative to
and . In cases of confusion,
we will write
is a pre-field of complex
transseries, which we call the exponential extension of , relative to
and . In cases of confusion,
we will write  instead of . Notice that the exponential of any series in is defined in .
instead of . Notice that the exponential of any series in is defined in .
Again, the structure of does not really depend
on the choice of  . Indeed, if
. Indeed, if
 and
and  are two different
such choices, then
are two different
such choices, then
 |
(3) |
is an increasing isomorphism between  and
and  .
.
Starting with from the previous section, we may
now consider the iterated exponential extensions  ,
,  ,
,  of . The
union
of . The
union

of these fields is called a field of complex transseries in . Of course, the construction of depends on the successive choices of angles  and directions
and directions  for
for  , with indices in
, with indices in  .
The angles and directions
for coincide with these choices on each . We will write
.
The angles and directions
for coincide with these choices on each . We will write  instead of whenever confusion may arise.
instead of whenever confusion may arise.
We claim that and  are
isomorphic as soon as the restrictions of and
are
isomorphic as soon as the restrictions of and
 to are compatible. We
have already shown (see formulas (2) and (3))
that there exist isomorphisms
to are compatible. We
have already shown (see formulas (2) and (3))
that there exist isomorphisms
for each  . Now let
. Now let  be such that
be such that  for each
for each  . Then we observe that
. Then we observe that  for all and
for all and  .
By induction over
.
By induction over  , it then
follows that for
, it then
follows that for  for all
for all  and
and  . Given , this shows that the value of
. Given , this shows that the value of  does not depend on the choice of ,
for sufficiently large . In
other words, the
does not depend on the choice of ,
for sufficiently large . In
other words, the  can be glued together into an
isomorphism between and .
can be glued together into an
isomorphism between and .
Remark  , when
starting with
, when
starting with  instead of
instead of  . Notice that is not
necessarily a monomial when adopting this generalization.
. Notice that is not
necessarily a monomial when adopting this generalization.
Actually, in our construction of pre-fields of complex transseries in
, it is reasonable to require
that require that  for all sufficiently large
, thereby eliminating all
ambiguity (up to isomorphism) in the construction of . More generally, a pre-field of complex
transseries is a field of complex
transseries, if it satisfies the following axiom:
for all sufficiently large
, thereby eliminating all
ambiguity (up to isomorphism) in the construction of . More generally, a pre-field of complex
transseries is a field of complex
transseries, if it satisfies the following axiom:
For each , there exists
an  , such that for all
, such that for all
 we have
we have
 .
.
 .
.
Then up to isomorphism, we have constructed the field of
grid-based complex transseries in .
Actually, the same procedure of exponential extensions and direct limits
can be used to close any field of complex transseries under
exponentiation. Again, this closure is unique up to isomorphism.
Remark
Let  be a sequence of monomials in , such that
be a sequence of monomials in , such that  . Then there exists an , such that for all
we have
. Then there exists an , such that for all
we have
 for all
for all  .
.
 .
.
This axiom allows the resolution of certain functional equations like
which admits natural solutions of the form

which are called nested transseries.
Consider a tuple  of non zero complex transseries
in with
of non zero complex transseries
in with  .
We call
.
We call  a complex transbasis if the
following conditions are satisfied:
a complex transbasis if the
following conditions are satisfied:
 for some
for some  ,
which is called the level of .
,
which is called the level of .
 for each
for each  .
.
 (i.e.
(i.e.  ).
).
Such a transbasis generates a complex asymptotic scale  . We say that
. We say that  can be expanded w.r.t. if
can be expanded w.r.t. if  . If
. If  ,
then we say that (and any ) is purely exponential. The following
incomplete transbasis theorem is proved in a similar way as in
the case of real transseries:
,
then we say that (and any ) is purely exponential. The following
incomplete transbasis theorem is proved in a similar way as in
the case of real transseries:
Theorem  be a transbasis and a complex
transseries. Then
be a transbasis and a complex
transseries. Then  can be expanded w.r.t. a
super-transbasis
can be expanded w.r.t. a
super-transbasis  of .
of .
We define a strong derivation w.r.t. on  in the usual way: we take
in the usual way: we take

for all monomials  . This
yields a derivation on
. This
yields a derivation on  through extension by
strong linearity. Given a derivation on ,
we define
through extension by
strong linearity. Given a derivation on ,
we define
for all monomials  . This
again yields a derivation on
. This
again yields a derivation on  through extension
by strong linearity. By induction over ,
we thus obtain a derivation on .
through extension
by strong linearity. By induction over ,
we thus obtain a derivation on .
We recall that a derivation on is said to be
strictly valuated resp. strictly positive if the following
conditions are satisfied:
 , for all
, for all  with
with  ;
;
 , for all
, for all  .
.
Contrary to the case of real transseries, our derivation on cannot be strictly positive. Indeed, either  or
or  , say . Then we have
, say . Then we have  , so either
, so either  or
or  . On the other hand, the following
may be proved in the usual way:
. On the other hand, the following
may be proved in the usual way:
Theorem  is strictly valuated.
is strictly valuated.
Actually, the proof involves upward shiftings of transseries: given
, its upward (resp. downward)
shifting is defined by  (resp.
(resp.  ). Contrary to the case of real transseries,
this transseries does not necessarily live in the same field of
transseries as
). Contrary to the case of real transseries,
this transseries does not necessarily live in the same field of
transseries as  : if
: if  , then we have
, then we have  , where
, where  and
and  for all transmonomials .
In the case of downward shiftings, one may have to consider the
generalized fields of complex transseries in
from remark 8.
for all transmonomials .
In the case of downward shiftings, one may have to consider the
generalized fields of complex transseries in
from remark 8.
It is more difficult to extend functional composition from the real to
the complex setting due to possible incompatibility between the angles
and directions. For instance, if  ,
then the transseries
,
then the transseries  can not be composed on the
right with
can not be composed on the
right with  . In general,
right composition with a given transseries is only defined on a certain
subfield of . Contrary to the
case of real transseries, certain functional equations like
. In general,
right composition with a given transseries is only defined on a certain
subfield of . Contrary to the
case of real transseries, certain functional equations like
with  seem to fall outside the scope of the
theory of complex transseries, unless someone comes up with some really
new ideas to incorporate the solutions to such equations inside this
theory.
seem to fall outside the scope of the
theory of complex transseries, unless someone comes up with some really
new ideas to incorporate the solutions to such equations inside this
theory.
One of the main ideas behind the construction of fields of complex transseries is that we do not longer require the ordering on the constant field to be compatible with the multiplication. Indeed, we just need the compatibility with the addition (or multiplication with reals), in order to obtain ordered monomial groups via exponentiation.
The above idea may be used to generalize the results from this section
to other circumstances. Consider for instance the set  of
of  -adic complex numbers,
where
-adic complex numbers,
where  . Then it is classical
that there exists a partial logarithm on ,
which is defined for all with
. Then it is classical
that there exists a partial logarithm on ,
which is defined for all with  . By Zorn's lemma, there exists a total
ordering on the
. By Zorn's lemma, there exists a total
ordering on the  -vector space
. The theory of this section
may now be adapted in order to construct the field
-vector space
. The theory of this section
may now be adapted in order to construct the field  of complex -adic transseries.
of complex -adic transseries.
A first change concerns the condition T1, which should now become
Furthermore, it is not as easy as before to characterize the total
orderings on , which are
compatible with the -vector
space structure. Consequently, there is no natural analogue to the
condition T4 and we have to satisfy ourselves with the
construction of pre-fields of complex transseries. Also, the
exponentiation on is not total.
Notice that it seems to be possible to take
itself for the indeterminate in the construction
of . This would yield a field
of transseries which contains  and such that the
logarithm is defined for all non zero elements.
and such that the
logarithm is defined for all non zero elements.
In practical computations with complex transseries the angles and directions are not known in
advance and we have to choose them (or more precisely, to put
constraints on them) as the computation progresses. This can be done by
introducing a closed interval  for each
transmonomial , which
corresponds to the constraint
for each
transmonomial , which
corresponds to the constraint
 |
(4) |
on  . Given such sets
. Given such sets  , we will work with generic
complex transseries which are in the “intersection” of
all
, we will work with generic
complex transseries which are in the “intersection” of
all  such that and satisfy the above constraints. Actually, it is
convenient to always work w.r.t. generic complex transbases, which we
will introduce now.
such that and satisfy the above constraints. Actually, it is
convenient to always work w.r.t. generic complex transbases, which we
will introduce now.
Let be an  -tuple
of symbols. Assume that each
-tuple
of symbols. Assume that each  comes with closed
interval
comes with closed
interval  modulo
modulo  ,
such that
,
such that  . Then we may order
the monomial group
. Then we may order
the monomial group  by
by

for each non zero monomial  with
with  . We call a generic
complex asymptotic basis of the scale .
Such a basis is called a generic complex transbasis, if
. We call a generic
complex asymptotic basis of the scale .
Such a basis is called a generic complex transbasis, if
for some ,
which is called the level of ,
and  .
.
 is a regular, infinitely large transseries
in
is a regular, infinitely large transseries
in  for each .
for each .
.
An important question is whether the asymptotic constraints on the determine a non empty region of the complex
transplane (see chapter 6 of [vdH97]). This question will
be addressed in a forthcoming paper.
Example  is a transbasis, for the constraints
is a transbasis, for the constraints  . Computations with respect to this transbasis
are valid in regions of
. Computations with respect to this transbasis
are valid in regions of  ,
where
,
where  . This is for instance
the case for
. This is for instance
the case for  , such that
, such that  in a region where
in a region where  for some
small
for some
small  and
and  .
.
A generic complex transseries is an element of  for some complex transbasis
for some complex transbasis  .
It can be shown that two transbases which have a non empty region of
definition in common can be merged together. In the remainder of the
paper we will follow an easier approach, which consists of working with
respect to a current transbasis, which may be enlarged and on
which we may impose additional asymptotic constraints during
computations with complex transseries.
.
It can be shown that two transbases which have a non empty region of
definition in common can be merged together. In the remainder of the
paper we will follow an easier approach, which consists of working with
respect to a current transbasis, which may be enlarged and on
which we may impose additional asymptotic constraints during
computations with complex transseries.
By construction, all ring operations can already be carried out in an
algebra of the form . In
order to invert a complex transseries, we first have to be able to
compute its dominant monomial. In principle, both
or  might be “the” dominant monomial
of a transseries like
might be “the” dominant monomial
of a transseries like  .
Nevertheless, given a transseries
.
Nevertheless, given a transseries  with dominant
monomials
with dominant
monomials  , then we may
always separate
, then we may
always separate  cases
cases
in each of which has only one dominant monomial.
This case separation technique is explained in detail in [vdH97].
In the present context, the imposition of a constraint
with reduces to the insertion of  in the interval
in the interval  .
If the length of the new interval exceeds
.
If the length of the new interval exceeds  ,
then (4) can not be satisfied, so that the corresponding
case does not need to be considered.
,
then (4) can not be satisfied, so that the corresponding
case does not need to be considered.
Remark , we should consider
the cases  and
and  ,
but also
,
but also  . However, in the
present paper, we argue that the situation when
is “degenerate” in the sense that it corresponds to a single
“direction”
. However, in the
present paper, we argue that the situation when
is “degenerate” in the sense that it corresponds to a single
“direction”  among a continuous
number if possibilities.
among a continuous
number if possibilities.
As a consequence, we notice that the process of
“regularization” of a complex transseries is much easier
than in the case of multivariate transseries studied in [vdH97].
Indeed, in the case when one has to consider the possibility that , one also has to consider the
possibility of cancellation  or
or  . This would necessitate refinements of the
coordinates and rewriting of the series in .
. This would necessitate refinements of the
coordinates and rewriting of the series in .
Example is either given by

or

Consider a non zero complex transseries .
Modulo case separations, we may assume that is
regular, so that we can write

with  and
and  .
Consequently,
.
Consequently,

If  , then this series is
already in . Otherwise, it
still is, modulo the insertion of a new element
, then this series is
already in . Otherwise, it
still is, modulo the insertion of a new element  in front of the transbasis, subject to the constraint
in front of the transbasis, subject to the constraint  . Since
. Since  is a new
symbol, this constraint is non contradictory with the existing
expo-linear constraints on the .
The relation
is a new
symbol, this constraint is non contradictory with the existing
expo-linear constraints on the .
The relation  is automatically verified, since
is automatically verified, since
 .
.
Consider a complex transseries .
Modulo case separations, we may assume that is
regular. In order to compute the exponential of , we distinguish three cases:
is bounded. We may write  , with
, with  and . Hence,
and . Hence,  , with and
, with and  .
.
 for some
for some  (where we
understand that the left resp. right hand side relation is verified if
(where we
understand that the left resp. right hand side relation is verified if
 resp.
resp.  ).
We decompose
).
We decompose  , where
, where  and
and  .
Inserting
.
Inserting  into by
into by
 , we then have
, we then have  .
.
 for some .
We may write
for some .
We may write  , with
, with  and
and  .
Then
.
Then  and we compute
and we compute  using the same algorithm. The computation of
cannot give rise to infinite loops, since the transbasis would remain invariant in such a loop, while the index
would strictly decrease.
using the same algorithm. The computation of
cannot give rise to infinite loops, since the transbasis would remain invariant in such a loop, while the index
would strictly decrease.
Consider the complex “exp-log function”
and let us show how to expand it generically with respect to a generic
complex transbasis. We start with  and
recursively expand all subexpressions of .
and
recursively expand all subexpressions of .
 ., we
fall into the second case of the exponentiation algorithm, since
., we
fall into the second case of the exponentiation algorithm, since  and
and  .
Consequently, we insert into
using
.
Consequently, we insert into
using  , so that expands as .
, so that expands as .
 and
and  .
. is a ring, we immediately have
is a ring, we immediately have  . Since the expansions of sums
and products do not present any problems, we will omit them in what
follows.
. Since the expansions of sums
and products do not present any problems, we will omit them in what
follows.
 ., we
first have to determine the dominant of .
Two cases need to be distinguished for this, namely
., we
first have to determine the dominant of .
Two cases need to be distinguished for this, namely  , which corresponds to
, which corresponds to  , and
, and  ,
which corresponds to
,
which corresponds to  . In
the first case,
. In
the first case,  , so that
needs to be inserted into . In the second case,
, so that
needs to be inserted into . In the second case,  , so we rewrite
, so we rewrite  .
.
 ., we have
., we have
 , so we rewrite
, so we rewrite  . In the other case, when , the argument
. In the other case, when , the argument  is bounded, so that
is bounded, so that  .
.
. . If ,
then we separate the cases
. If ,
then we separate the cases  in which
in which  , and
, and  in
which
in
which  . In the first case,
we obtain
. In the first case,
we obtain

In the second case, we get

If , then  , so we separate the cases
, so we separate the cases  in which , and
in which , and  in which
in which  . If
. If
 , then
, then
Otherwise, we obtain

 |
In order to deal with integration constants when solving differential equations, we need to consider parameterized transseries. As in the case of generic transseries, if will often be necessary to distinguish several cases as a function of the values of the parameters. Again, this can be done by putting constraints on the parameters.
Let  be a
be a  -tuple
of complex parameters. We call a subset
-tuple
of complex parameters. We call a subset  of
of  a region, if is the
set of solutions of a system of polynomial equations or inequations
a region, if is the
set of solutions of a system of polynomial equations or inequations
where  , and “rational
function inequalities on the real parts”
, and “rational
function inequalities on the real parts”

where  and
and  does not
vanish on . Notice that may be seen as a special kind of semi-algebraic set,
under the isomorphism
does not
vanish on . Notice that may be seen as a special kind of semi-algebraic set,
under the isomorphism  . The
polynomial algebra
. The
polynomial algebra  will also be called the
coefficient or parameter algebra.
will also be called the
coefficient or parameter algebra.
Given a non empty region  ,
let be an -tuple
of symbols. Assume that each comes with a finite
set
,
let be an -tuple
of symbols. Assume that each comes with a finite
set  of directions, such that
of directions, such that  does not vanish on for all
does not vanish on for all  ,
,  ,
and such that
,
and such that
 |
(5) |
for all and  with
with  . In the case when
. In the case when  , the directions
correspond to the extremal angles in the intervals
, the directions
correspond to the extremal angles in the intervals  from the previous section.
from the previous section.
For each , there exists a
natural partial ordering  on the -vector space
on the -vector space  ,
which is generated by the relations
,
which is generated by the relations  for all
for all
 . Indeed, the constraints (5) in an arbitrary point
. Indeed, the constraints (5) in an arbitrary point  guarantee the
absence of relations
guarantee the
absence of relations
with  . Consequently, we may
define a natural neglection relation
. Consequently, we may
define a natural neglection relation  on the
asymptotic scale
on the
asymptotic scale  by
by
for each non zero monomial with . We say that is a
parameterized transbasis, if
for some ,
which is called the level of ,
and  .
.
is a regular, infinitely large transseries
in  for each .
for each .
.
A parameterized transseries is an element of  for
some transbasis
for
some transbasis  .
.
A regular parameterized transseries  is said to
be uniformly regular, if either
is said to
be uniformly regular, if either  ,
or
,
or  for all .
In this section we prove that any parameterized transseries can be uniformly regularized modulo case separations. We
notice that a uniformly regular parameterized transseries on a region
remains uniformly regular on any subregion of
.
for all .
In this section we prove that any parameterized transseries can be uniformly regularized modulo case separations. We
notice that a uniformly regular parameterized transseries on a region
remains uniformly regular on any subregion of
.
Lemma  be a monomial. Then, modulo case separations, we may
assume that either
be a monomial. Then, modulo case separations, we may
assume that either  ,
,  or
or  .
.
Proof. Write  ,
with
,
with  and separate the following
and separate the following  cases :
cases :
For some  , we have
, we have
 ;
;
For some , we have
 ;
;
 .
.
In the  cases A, we have . In the cases B
we have . In case C,
we have .
cases A, we have . In the cases B
we have . In case C,
we have .
Notice that the imposition of the constraints of the form  or
or  may involve a reduction of the
region
may involve a reduction of the
region  and/or the insertion of new directions
into
and/or the insertion of new directions
into  . Indeed, is an additional algebraic constraint on . In order to impose , we first impose the constraints
and
. Indeed, is an additional algebraic constraint on . In order to impose , we first impose the constraints
and  on ,
for all . Next we insert
on ,
for all . Next we insert  into .
into .
Lemma  be infinitesimal monomials in an arbitrary monomial
group
be infinitesimal monomials in an arbitrary monomial
group  with
with  -powers,
such that
-powers,
such that  , for certain
, for certain  . Then there exist infinitesimal
monomials
. Then there exist infinitesimal
monomials  , such that
, such that  for all
for all  .
.
Proof. Since  ,
we may assume without loss of generality that
,
we may assume without loss of generality that  , modulo a permutation of indices. We will prove the
lemma by induction over
, modulo a permutation of indices. We will prove the
lemma by induction over  . For
. For
 the lemma is trivial. So assume that
the lemma is trivial. So assume that  and let
and let  . Then
we have either
. Then
we have either  ,
,  or
or  .
.
If , then there exist  , such that
, such that  , by the induction hypothesis. Consequently,
, by the induction hypothesis. Consequently,  . If ,
then
. If ,
then  , whence a
fortiori
, whence a
fortiori  . If , then there exist
. If , then there exist  , such that
, such that  ,
by the induction hypothesis. Hence
,
by the induction hypothesis. Hence  .
The lemma follows by induction.
.
The lemma follows by induction.
Theorem can be uniformly regularized modulo case
separations.
Proof. Let  be such that
be such that  . By lemma 15, we may
assume without loss of generality that either
. By lemma 15, we may
assume without loss of generality that either  ,
,  or
or  for each
for each  , modulo some case
separations. Without loss of generality, we may therefore assume that
admits a Cartesian representation in
, modulo some case
separations. Without loss of generality, we may therefore assume that
admits a Cartesian representation in  , i.e.
, i.e.  for
certain
for
certain  . Choosing
. Choosing  minimal, we will prove the theorem by induction over . If
minimal, we will prove the theorem by induction over . If  ,
then
,
then  , and we have nothing to
prove. So assume that
, and we have nothing to
prove. So assume that  .
.
We will first show how to regularize modulo case
separations. So let  be the set of dominant
monomials of . By repeated
application of lemma 15, and modulo reordering, we may
assume that
be the set of dominant
monomials of . By repeated
application of lemma 15, and modulo reordering, we may
assume that  . If all these
inequalities are strict, then we are done, since
. If all these
inequalities are strict, then we are done, since  will be the only dominant monomial. Otherwise, we have
will be the only dominant monomial. Otherwise, we have  for certain
for certain  , which yields a
non trivial relation
, which yields a
non trivial relation  for certain
for certain  . Then lemma 16 implies that we
may find a Cartesian representation for in
. Then lemma 16 implies that we
may find a Cartesian representation for in  variables only, and we are done again, by the
induction hypothesis.
variables only, and we are done again, by the
induction hypothesis.
In order to make uniformly regular modulo case
separations, we use the following algorithm:
Regularize modulo case separations and let
 be its dominant monomial (if ).
be its dominant monomial (if ).
If , or  for all ,
then we are done.
for all ,
then we are done.
Separate the cases when  and
and  and go back to step 1.
and go back to step 1.
We have to show that this algorithm terminates. Assume the contrary and
let  be the successive dominant monomials of in step 1 on smaller and smaller subregions
be the successive dominant monomials of in step 1 on smaller and smaller subregions  of .
Ultimately, for each , there
exists a
of .
Ultimately, for each , there
exists a  with
with  in step 2,
and the next region is given by
in step 2,
and the next region is given by  in step 3. Now
the numerators of all coefficients
in step 3. Now
the numerators of all coefficients  belong to the
Noetherian polynomial ring
belong to the
Noetherian polynomial ring  .
Consequently, the increasing chain of ideals
.
Consequently, the increasing chain of ideals  is
stationary and so is the decreasing chain of
subregions of :
contradiction.
is
stationary and so is the decreasing chain of
subregions of :
contradiction.
Using the tool of uniform regularization, we may compute with
parameterized complex transseries in a similar way as explained in
sections 3.2, 3.3 and 3.4. Of
course, it may happen that we need to exponentiate or to take logarithms
of parameterized constants in .
Nevertheless, this can only happen a finite number of times, so that we
may see these exponentials resp. logarithms as new parameters.
Furthermore, we will show that it is never necessary to exponentiate or
take logarithms of parameterized constants during the resolution of
algebraic differential equations.
Example

. into
into  and get
and get
We thus have to determine whether  and
and  , which leads to the following
cases and expansions for :
, which leads to the following
cases and expansions for :
. into and
next need to determine whether
into and
next need to determine whether  or
or  . This leads to the following cases and
expansions for :
. This leads to the following cases and
expansions for :

In the last exceptional case when  ,
we get
,
we get
so that we need to determine whether  or
or  . This leads to the following final
cases and expansions for :
. This leads to the following final
cases and expansions for :
In the remainder of this paper, we will be concerned with the resolution of asymptotic algebraic differential equations like
 |
(6) |
where  is a differential polynomial with
transseries coefficients and
is a differential polynomial with
transseries coefficients and  a transmonomial.
a transmonomial.
In this section, we describe the differential Newton polygon method,
which enables us to compute the successive terms of solutions one by
one. In the next sections, we will be concerned with the transformation
of this transfinite process into a finite algorithm. In sections 5, 6 and 7 the transseries in are assumed to be as in section 2. In
section 8, we will consider parameterized transseries
solutions.
Except for the usual asymptotic relations  and
and
 , we will also need the
flattened relations
, we will also need the
flattened relations  and there variants
and there variants  , where
, where  is
an infinitely large or small transseries. These relations are defined by
is
an infinitely large or small transseries. These relations are defined by
Notice that  ,
,  and
and  .
.
The differential polynomial is most naturally
decomposed as
 |
(7) |
Here we use vector notation for tuples  and
and  of integers:
of integers:

The -th homogeneous
part of is defined by
so that
 along orders
along orders
Another very useful decomposition of is its
decomposition along orders:
 |
(8) |
In this notation,  runs through tuples
runs through tuples  of integers in
of integers in  of length
of length  , and
, and  for
all permutations of integers. We again use vector notation for such
tuples
for
all permutations of integers. We again use vector notation for such
tuples

We call  || the weight
of and
|| the weight
of and
the weight of .
It is convenient to denote the successive logarithmic derivatives of
by
Then each  can be rewritten as a polynomial in
can be rewritten as a polynomial in
 :
:
We define the logarithmic decomposition of
by
 |
(9) |
where
Now consider the lexicographical ordering  on
on
 , defined by
, defined by
This ordering is total, so there exists a maximal  for with
for with  ,
assuming that
,
assuming that  . For this
, we have
. For this
, we have
 |
(10) |
for all , whose dominant
monomial is sufficiently large.
Given a differential polynomial and a
transseries it is useful to define the
additive and multiplicative conjugates  and
and  of w.r.t. and the upward shifting
of w.r.t. and the upward shifting  of
as being the unique differential polynomials,
such that for all , we have
of
as being the unique differential polynomials,
such that for all , we have
The coefficients of are explicitly given by
 |
(11) |
The coefficients of are more easily expressed
using decompositions along orders:
 |
(12) |
The coefficients of the upward shifting (or compositional conjugation by
) are given by
 |
(13) |
where the  are generalized Stirling numbers of
the first kind:
are generalized Stirling numbers of
the first kind:
Given a differential polynomial with transseries
coefficients, its dominant monomial  is
defined by
is
defined by
 |
(14) |
and its dominant part (or coefficient)  by
by
 |
(15) |
The following theorem shows how  looks like after
sufficiently many upward shiftings:
looks like after
sufficiently many upward shiftings:
Proposition be a differential polynomial with purely
exponential coefficients. Then there exists a polynomial  and an integer
and an integer  ,
such that for all
,
such that for all  , we have
, we have
 .
.
Proof. Let be minimal, such
that there exists an  with
with  and
and  . Then we have
. Then we have  and
and
 |
(16) |
by formula (13). Since  ,
we must have
,
we must have  . Consequently,
. Consequently,
 . Hence, for some
. Hence, for some  , we have
, we have  . But then (16) applied on
. But then (16) applied on  instead of yields
instead of yields  . This shows that
. This shows that  is
independent of , for .
is
independent of , for .
In order to prove the proposition, it now suffices to show that  implies
implies  for some polynomial
. For all differential
polynomials
for some polynomial
. For all differential
polynomials  of homogeneous weight , let
of homogeneous weight , let
 |
(17) |
Since  , it suffices to show
that
, it suffices to show
that  if and only if
if and only if  . Now implies that
. Now implies that  . Furthermore, (13)
yields
. Furthermore, (13)
yields
 |
(18) |
Consequently, we also have  .
By induction, it follows that
.
By induction, it follows that  for any iterated
exponential of . We conclude
that
for any iterated
exponential of . We conclude
that  , by (10).
, by (10).
Given an arbitrary differential polynomial ,
the above proposition implies that there exists a polynomial and an integer  ,
such that for all sufficiently large . We call
,
such that for all sufficiently large . We call
the differential Newton polynomial of . More generally, given a monomial , we call  the
differential Newton polynomial of
associated to .
the
differential Newton polynomial of
associated to .
Returning to the asymptotic differential equation (6), we
call  a potential dominant monomial, if
admits a non trivial root
a potential dominant monomial, if
admits a non trivial root  , where
, where  stands for the
algebraic closure of . If
stands for the
algebraic closure of . If
 , then the corresponding term
, then the corresponding term
 is called a potential dominant term. The
multiplicity of
is called a potential dominant term. The
multiplicity of  (and of ) is the differential valuation of
(and of ) is the differential valuation of  , i.e. the least such
that
, i.e. the least such
that  . The Newton
degree of (6) is the largest possible degree of for monomials .
. The Newton
degree of (6) is the largest possible degree of for monomials .
is a regular, non-zero transseries solution to
 is
a potential dominant term.
is
a potential dominant term.
A potential dominant monomial is said to be
algebraic if is non homogeneous, and
differential if  . A
potential dominant monomial, which is both algebraic and differential,
is said to be mixed. Notice that (12) implies
. A
potential dominant monomial, which is both algebraic and differential,
is said to be mixed. Notice that (12) implies
if the coefficients of and
are purely exponential.
The algebraic potential dominant monomials correspond to the slopes of
the Newton polygon in a non differential setting. However, they can not
be determined directly as a function of the dominant monomials of the
 , because there may be some
cancellation of terms in the different homogeneous parts during
multiplicative conjugations. Instead, the algebraic potential dominant
monomials are determined by successive approximation:
, because there may be some
cancellation of terms in the different homogeneous parts during
multiplicative conjugations. Instead, the algebraic potential dominant
monomials are determined by successive approximation:
Proposition be such that  and
and  .
.
If is purely exponential, then there
exists a unique purely exponential monomial , such that  .
.
Denoting by  the monomial
in
the monomial
in  , such that for all
, such that for all  we have
we have  .
.
There exists a unique monomial ,
such that  is non homogeneous.
is non homogeneous.
Proof. In (a), let be a
purely exponential transbasis for the coefficients of . We prove the existence of  by induction over the least possible ,
such that we may write
by induction over the least possible ,
such that we may write  . If
. If
 , then we have . Otherwise, let
, then we have . Otherwise, let  with
with
 . Then
. Then
so that  for some
for some  and
and
 . By the induction
hypothesis, there exists a purely exponential monomial
. By the induction
hypothesis, there exists a purely exponential monomial  , such that
, such that  .
Hence we may take
.
Hence we may take  . As to the
uniqueness of , assume that
. As to the
uniqueness of , assume that
 with
with  .
Then
.
Then
This proves (a).
With the notations from proposition 19, we have already
shown that  and that equality occurs if and only
if
and that equality occurs if and only
if  . Because of (12),
we also notice that
. Because of (12),
we also notice that  for all
for all  . It follows that
. It follows that
and similarly for  instead of
instead of  , since we necessarily have
, since we necessarily have  for some . We finally notice
that
for some . We finally notice
that  and
and  imply that
imply that
 , since
, since  whenever
whenever  and
and  .
Consequently,
.
Consequently,  and
and  stabilize for
stabilize for  with .
For this , we have
(b).
with .
For this , we have
(b).
With the notations from (b),  is actually
the unique monomial such that
is actually
the unique monomial such that
is non homogeneous for all sufficiently large  . Now
. Now  for sufficiently large
. This proves (c) for
purely exponential differential polynomials , and also for general differential polynomials,
after sufficiently many upward shiftings.
for sufficiently large
. This proves (c) for
purely exponential differential polynomials , and also for general differential polynomials,
after sufficiently many upward shiftings.
The unique monomial from part (c) of the
above proposition is called an equalizer or the  -equalizer for .
An algebraic potential dominant monomial is necessarily an equalizer.
Consequently, there are only a finite number of algebraic potential
dominant monomials and they can be found as described in the proof of
proposition 21. Notice that, given a transbasis for the coefficients of ,
all equalizers for belong to
-equalizer for .
An algebraic potential dominant monomial is necessarily an equalizer.
Consequently, there are only a finite number of algebraic potential
dominant monomials and they can be found as described in the proof of
proposition 21. Notice that, given a transbasis for the coefficients of ,
all equalizers for belong to  .
.
In order to find the differential potential dominant monomials, it
suffices to consider the homogeneous parts of
, since  , if
, if  and
and  . Now we may rewrite as
. Now we may rewrite as
 times a differential polynomial
times a differential polynomial  of order
of order  in
in  .
We call the -th
Ricatti equation associated to .
Since solving
.
We call the -th
Ricatti equation associated to .
Since solving  is equivalent to solving
is equivalent to solving  , we are entitled to expect that
finding the potential dominant monomials of
w.r.t.
, we are entitled to expect that
finding the potential dominant monomials of
w.r.t.  is equivalent to solving
“up to a certain extent”.
is equivalent to solving
“up to a certain extent”.
Proposition  is a potential dominant monomial of
w.r.t.
is a potential dominant monomial of
w.r.t.
 |
(19) |
if and only if the equation
 |
(20) |
has strictly positive Newton degree.
Proof. We first notice that  for
all and .
We claim that the equivalence of the proposition holds for and if and only if it holds for
for
all and .
We claim that the equivalence of the proposition holds for and if and only if it holds for
 and
and  .
Indeed, is potential dominant monomial w.r.t.
(19), if and only if is a potential
dominant monomial w.r.t.
.
Indeed, is potential dominant monomial w.r.t.
(19), if and only if is a potential
dominant monomial w.r.t.
 |
(21) |
and (20) has strictly positive Newton degree if and only if
 |
(22) |
has strictly positive Newton degree. Now the latter is the case if and only if

has strictly positive Newton degree. But

This proves our claim.
Now assume that is a potential dominant monomial
w.r.t. (19). In view of our claim, we may assume without
loss of generality that and
are purely exponential and that  .
Since is homogeneous, we have
.
Since is homogeneous, we have  for some
for some  and
and
Since  is purely exponential, it follows that
is purely exponential, it follows that
 has degree ,
so that the Newton degree of (20) is at least . Similarly, if is not
a potential dominant monomial w.r.t. (19), then
has degree ,
so that the Newton degree of (20) is at least . Similarly, if is not
a potential dominant monomial w.r.t. (19), then  and
and
for some . Consequently,  for any infinitesimal monomial
for any infinitesimal monomial  , and the Newton degree of (20)
vanishes.
, and the Newton degree of (20)
vanishes.
Now we know how to determine potential dominant terms of solutions to (6), let us show how to obtain more terms. A refinement is a change of variables together with an asymptotic constraint
 |
(23) |
where  . Such a refinement
transforms (6) into
. Such a refinement
transforms (6) into
 |
(24) |
We call the refinement admissible, if (24) has strictly positive Newton degree.
Proposition  be the dominant term of
be the dominant term of  and assume that
and assume that  . Then the
Newton degree of
. Then the
Newton degree of  of
of  as a
root of .
as a
root of .
Proof. Let us first show that  for any monomial
for any monomial  . Modulo
replacing by
. Modulo
replacing by  we may
assume without loss of generality that .
Modulo a sufficient number of upward shiftings, we may also assume that
we may
assume without loss of generality that .
Modulo a sufficient number of upward shiftings, we may also assume that
 , that
, that  , and that ,
and are purely
exponential. The differential valuation of
, and that ,
and are purely
exponential. The differential valuation of  being
, we have in particular
being
, we have in particular  . Hence,
. Hence,

for all  . We infer that .
. We infer that .
At a second stage, we have to show that  .
Without loss of generality, we may again assume that , that ,
and that and are purely
exponential. The differential valuation of being
, we have
.
Without loss of generality, we may again assume that , that ,
and that and are purely
exponential. The differential valuation of being
, we have  for all
for all  . Taking
. Taking  , we thus get
, we thus get
for all . We conclude that
.
Consider the algebraic differential equation
 |
(25) |
Let us start by computing the potential dominant monomials of . We first have to find the  -equalizer relative to (25).
Since
-equalizer relative to (25).
Since  , we cannot have
, we cannot have  , so we have to compute
, so we have to compute
In order to “equalize”  and
and  , we have to conjugate multiplicatively with
, we have to conjugate multiplicatively with  :
:
At this point, we observe that  ,
so we have found the -equalizer,
which is
,
so we have found the -equalizer,
which is  . Since
. Since  , the corresponding algebraic potential
dominant term of is
, the corresponding algebraic potential
dominant term of is  . As to the differential potential dominant
monomials, we have
. As to the differential potential dominant
monomials, we have
Clearly,  has no roots and
has no roots and  has all constants as its solutions modulo
has all constants as its solutions modulo  . Consequently,
. Consequently,  is a potential dominant monomial of for all
, such that . The corresponding differential potential
dominant terms are of the form
is a potential dominant monomial of for all
, such that . The corresponding differential potential
dominant terms are of the form  ,
with
,
with  and .
and .
In order to find more terms of the solution to (25), we have to refine the equation. First of all, consider the refinement
which transforms (25) into
 |
(26) |
Since  , we first observe that
, we first observe that
 is actually a solution to (25). On
the other hand, since
is actually a solution to (25). On
the other hand, since  is a potential dominant
term of multiplicity 1 of ,
the Newton degree of (26) is one. The only potential
dominant monomials of
is a potential dominant
term of multiplicity 1 of ,
the Newton degree of (26) is one. The only potential
dominant monomials of  therefore necessarily
correspond to solutions modulo of the Ricatti
equation
therefore necessarily
correspond to solutions modulo of the Ricatti
equation
These solutions are of the form  and
and  , which leads to the potential dominant
monomials and
, which leads to the potential dominant
monomials and  ,
from which we remove , since
,
from which we remove , since
 . Expanding one term further,
we see that the generic solution to (26) is
. Expanding one term further,
we see that the generic solution to (26) is
with and where the case  recovers the previous solution. In other words,
recovers the previous solution. In other words,
is the first type of generic solution to (25).
As to the second case, we consider the refinement
which transforms (25) into
 |
(27) |
Again, this equation has Newton degree one. On the one hand, we observe
that the linear part of this equation only admits solutions with
dominant monomial or  . Consequently, (27) admits at most one
solution. On the other hand, we will show in the next section that
quasi-linear equations (i.e. of Newton degree one) always
admit at least one solution. In our case, this leads to the following
second type of generic solution to (25):
. Consequently, (27) admits at most one
solution. On the other hand, we will show in the next section that
quasi-linear equations (i.e. of Newton degree one) always
admit at least one solution. In our case, this leads to the following
second type of generic solution to (25):
For the present example, we actually even found exact solutions. Of course, the expansions are infinite in general.
Let be a purely exponential transbasis. A linear
operator on

is said to be grid-based if its operator support

is grid-based. For all transseries  we have
we have
In particular, the differentiation  on
on  is grid-based with
is grid-based with
Consequently, any linear differential operator  with coefficients in is also grid-based, since
with coefficients in is also grid-based, since

We will now show that  also admits a so called
distinguished left inverse
also admits a so called
distinguished left inverse  ,
which is linear and grid-based. Here a distinguished solution to
the equation
,
which is linear and grid-based. Here a distinguished solution to
the equation
is a solution , such that for
all other solutions  , we have
, we have
 . Distinguished solutions are
clearly unique. We say that
. Distinguished solutions are
clearly unique. We say that  is a distinguished
left inverse of , if
is a distinguished
left inverse of , if  is a distinguished solution to
is a distinguished solution to  for each
for each  .
.
In what follows, we will often consider linear differential operators
as linear differential polynomials. In this
case, you should keep in mind that  denotes the
coefficient of in and
not the -th homogeneous part.
We will also denote
denotes the
coefficient of in and
not the -th homogeneous part.
We will also denote  for any linear differential
operator as above.
for any linear differential
operator as above.
Theorem be a linear differential operator with
coefficients in and  . Then
. Then  admits a
distinguished linear left inverse on
admits a
distinguished linear left inverse on  . This left inverse is grid-based
and
. This left inverse is grid-based
and

where

Proof. Let  and
and  . There exists a unique strongly linear
operator
. There exists a unique strongly linear
operator  , such that
, such that

for all  . The operator
. The operator  admits a natural left inverse
admits a natural left inverse  , which is constructed as follows. Let
, which is constructed as follows. Let  , where is purely
exponential. By proposition 21(a), there exists a
purely exponential monomial with
, where is purely
exponential. By proposition 21(a), there exists a
purely exponential monomial with  . Let
. Let  and
and  respectively denote the dominant monomial and dominant
part of
respectively denote the dominant monomial and dominant
part of  . Let
. Let
where  is minimal with
is minimal with  . Then we observe that
. Then we observe that
so that  . Consequently, we
may take
. Consequently, we
may take  and extend
and extend  to
the whole of
to
the whole of  by strong linearity.
by strong linearity.
Let  . By construction, the
operator
. By construction, the
operator  is strictly extensive, and the operator
is strictly extensive, and the operator
 coincides with on
coincides with on  . Now consider the functional
. Now consider the functional
By the implicit function theorem from [vdH00b], there exists a linear operator

such that  for all
for all  .
Consequently,
.
Consequently,
is a strongly linear left inverse for .
In order to prove that is actually a grid-based
operator, we first notice that, by construction,

Since

it therefore suffices to prove that  and
and  are grid-based. But this follows from theorem 17 when considering
are grid-based. But this follows from theorem 17 when considering  as a generic
transseries in
as a generic
transseries in  , for
, for  . Indeed, there exist a finite
number of regions, each on which is uniformly
regular. Consequently,
. Indeed, there exist a finite
number of regions, each on which is uniformly
regular. Consequently,  can only take a finite
number of values and
can only take a finite
number of values and
is contained in the union of the supports of the generic transseries
on each of the regions.
Remark  induces a canonical solution
induces a canonical solution  to
to  . This canonical solution
satisfies
. This canonical solution
satisfies  and
and  for all
for all
 . Actually, the canonical
solutions
. Actually, the canonical
solutions  are polynomials of degree
are polynomials of degree  in with coefficients in . In order to see this, let
in with coefficients in . In order to see this, let
Then we observe that maps  into
into  and that maps into .
and that maps into .
Let be a subset of a monomial group. The notion
of operator support can be extended to strongly  -linear operators
-linear operators  by
by

More generally, if  is a Noetherian operator,
then we define its operator support by
is a Noetherian operator,
then we define its operator support by

where  stands for the -th homogeneous part of
stands for the -th homogeneous part of  . We have
. We have
for all  . We say that is grid-based, if
. We say that is grid-based, if  is
grid-based.
is
grid-based.
Let be a purely exponential transbasis and a differential polynomial with coefficients in . Notice that we may naturally
consider as a grid-based operator on . The equation (6) is
said to be quasi-linear if its Newton degree is one. A solution
to such an equation is again said to be
distinguished if we have  for all other
solutions to (6).
for all other
solutions to (6).
Theorem
Proof. Without loss of generality, we may assume that
 and
and  .
We prove the proposition by induction over .
If
.
We prove the proposition by induction over .
If  , then we must have , so that
, then we must have , so that  is the distinguished solution to (6). So assume that
is the distinguished solution to (6). So assume that  and let
and let
be the dominant part of w.r.t.  . By the induction hypothesis, there exists a
distinguished solution to the quasi-linear equation
. By the induction hypothesis, there exists a
distinguished solution to the quasi-linear equation
 |
(28) |
We first proceed with the refinement

so that  , and a sufficient
number of upward shiftings, so that
, and a sufficient
number of upward shiftings, so that  is purely
exponential. We next decompose as
is purely
exponential. We next decompose as
where

Let  . Since
. Since  is stable under and for
each
is stable under and for
each  , the operator is strictly extensive on .
Consequently, the implicit function theorem from [vdH00b]
implies that the operator
, the operator is strictly extensive on .
Consequently, the implicit function theorem from [vdH00b]
implies that the operator  can be inverted, like
in the proof of theorem 24:
can be inverted, like
in the proof of theorem 24:

In particular,

is a solution to  .
Furthermore, we have
.
Furthermore, we have
so that

We claim that  is the distinguished solution.
Indeed, let
is the distinguished solution.
Indeed, let  be another solution and let
be another solution and let  . If
. If  ,
then
,
then
is a solution to (28), so that  . If
. If  ,
then let
,
then let
Since  , we have
, we have  , so that
, so that  is the
dominant monomial of a solution to the homogeneous equation
is the
dominant monomial of a solution to the homogeneous equation  . Consequently, ,
since
. Consequently, ,
since  .
.
Remark , it also
follows that we need at most upward shiftings in
order to express the distinguished solutions. In other words, if has coefficients in ,
where is purely exponential, then  . Actually, if
. Actually, if  is the
order of , then the number of
upward shiftings we need is also bounded by .
is the
order of , then the number of
upward shiftings we need is also bounded by .
Indeed, denoting  and using a similar argument as
in remark 25, we first observe that
is bijective on
and using a similar argument as
in remark 25, we first observe that
is bijective on  if
if  admits no solutions in
admits no solutions in  .
Moreover, if admits such a solution, then
.
Moreover, if admits such a solution, then  has a root with the same dominant part w.r.t. . The same observations recursively
hold for all involved in the resolution of (28). Now if is the distinguished
solution of (6), then the linear equation
has a root with the same dominant part w.r.t. . The same observations recursively
hold for all involved in the resolution of (28). Now if is the distinguished
solution of (6), then the linear equation  admits at most solutions. Hence, there are at
most transbasis elements
for which we need to make an upward shifting.
admits at most solutions. Hence, there are at
most transbasis elements
for which we need to make an upward shifting.
Consider the linear differential equation
 |
(29) |
under the assumptions and  . Then has coefficients in
. Then has coefficients in
 and
and
for each  , so that
, so that
Hence, theorem 24 implies that (29) has a
distinguished solution in  with
with  . Actually, it is easily seen that
. Actually, it is easily seen that

and the first terms of are given by

In order to find all solutions to (29), we have to solve the Ricatti equation associated to the linear part of (29):
 |
(30) |
This equation has two potential dominant terms
and  of multiplicities one. Consequently, we get
quasi-linear equations when refining
of multiplicities one. Consequently, we get
quasi-linear equations when refining  or
or  . When setting
. When setting  resp.
resp.  , these equations are
conveniently rewritten as
, these equations are
conveniently rewritten as
 |
(31) |
and
 |
(32) |
By theorem 26, these equations admit distinguished solutions

More precisely, in the proof of theorem 26, and for (31), we would have  ,
,
 and
and  .
It follows that
.
It follows that  , so that
, so that
 . Similarly,
. Similarly,  . Returning to (30), we obtain the
following solutions:
. Returning to (30), we obtain the
following solutions:

which yield a basis

of solutions to  .
.
It is interesting to study the solutions  to (29) from an analytical point of view. Indeed, the asymptotic
conditions
to (29) from an analytical point of view. Indeed, the asymptotic
conditions  or
or  and
and  or
or  divide complex space into
four non degenerate regions. However, each of these regions has
infinitely many “bounded connected components”. When moving
from one connected component to another one, a “generalized Stokes
phenomenon” occurs. Consequently, a specific formal solution to
(29) only makes sense on a bounded connected component from
the analytical point of view.
divide complex space into
four non degenerate regions. However, each of these regions has
infinitely many “bounded connected components”. When moving
from one connected component to another one, a “generalized Stokes
phenomenon” occurs. Consequently, a specific formal solution to
(29) only makes sense on a bounded connected component from
the analytical point of view.
Nevertheless, it is possible to give an asymptotic meaning to the generic formal solution to (29) on each region, by associating a “generalized Stokes matrix” to each connected component of the region. This issue will be detailed in a forthcoming paper. An interesting remaining question is the asymptotic behaviour of the Stokes matrices. Actually, the generalized Stokes phenomenon might be qualified as multi-Stokes phenomenon, since the Stokes phenomena occur with respect to several generalized sectors of different types. Equation (29) is one of the simplest examples which exhibits this multi-Stokes phenomenon.
Theorem 26 together with propositions 21, 22 and 23 suggest that the solutions to an arbitrary asymptotic algebraic equation (6) can be expressed using the field operations, exponentiation, logarithm and distinguished solutions of quasi-linear equations. This is indeed so, if the Newton degree decreases at each refinement in proposition 23.
The remaining case, when the Newton degree repeatedly does not decrease
in proposition 23, occurs when there are “almost
multiple solutions”. In order to “unravel” these
solutions, we have to find their greatest common part. More precisely,
consider an asymptotic algebraic differential equation (6)
of Newton degree . Then an
unravelling (or total unravelling) is a refinement
such that
The Newton degree of  equals .
equals .
For any  , the Newton
degree of
, the Newton
degree of  is
is  .
.
Clearly, the series , which
is also called an unraveller, may be replaced by any other series
of the form  with
with  .
.
From a theoretical point of view it is possible to prove a certain
number of facts about unravellings. First of all, any unraveller admits
a truncation  , which is a
canonical unraveller, in the sense that
, which is a
canonical unraveller, in the sense that
is an unravelling for all  with
with  , and that a similar property does not hold for
any proper truncation of .
, and that a similar property does not hold for
any proper truncation of .
Secondly, it is possible to construct the so called canonical
algebraic unraveller by transfinite
induction: having constructed the first  terms of
, say of sum
terms of
, say of sum  , one looks at the equation
, one looks at the equation  of Newton degree . If this
equation has an algebraic potential dominant term
of Newton degree . If this
equation has an algebraic potential dominant term  of multiplicity , then this
term is unique, and we take it to be the next term of .
of multiplicity , then this
term is unique, and we take it to be the next term of .
However, in what follows, we are interested in more constructive ways to obtain unravellings. For this purpose, we recall that in the more classical context of algebraic equations, multiple roots are usually found by solving the derivative (or a higher derivative) of the equation with respect to the indeterminate. In the next sections, we will describe a similar strategy in order to find the almost multiple solutions to asymptotic algebraic differential equations. The price to be paid is that we will need a sequence of so called partial unravellings (and adjusted partial unravellings) in order to construct a total unravelling.
Consider an asymptotic algebraic differential equation (6)
of Newton degree . Given a
monomial such that
admits a root of multiplicity ,
we define  by
by
If  with
with  ,
then
,
then  ;
;
If  , then
, then  .
.
Now let  ,
,  and
and  be such that
be such that
 .
.
The Newton degree of  is .
is .
For any with  ,
the Newton degree of
,
the Newton degree of  is .
is .
Then the refinement
 |
(33) |
is said to be a partial unravelling with
as its associated monomial. Notice that the equations  and
and  are quasi-linear. Partial
unravellings are constructed as follows.
are quasi-linear. Partial
unravellings are constructed as follows.
Proposition and  be as above. Then
there exists a
be as above. Then
there exists a  which satisfies the conditions
which satisfies the conditions
Proof. We construct sequences  and
and  of approximations of
and
of approximations of
and  , such that all
, such that all  and
and  satisfy the conditions
PU1 and PU2. We let
satisfy the conditions
PU1 and PU2. We let  be the
distinguished solution to the equation
be the
distinguished solution to the equation  and
and  . As long as
and do not satisfy the condition PU3,
there exists a
. As long as
and do not satisfy the condition PU3,
there exists a  with
with  , such that the Newton degree of
, such that the Newton degree of  is
is  . Hence we may take
. Hence we may take  and
and  .
.
We claim that the sequences and  are of length at most
are of length at most  ,
so that we may take their last elements for and
. Indeed, for each , the series
,
so that we may take their last elements for and
. Indeed, for each , the series  with
with  are solutions to the quasi-linear equation
are solutions to the quasi-linear equation
 . Consequently, the dominant
monomials of these series, which are pairwise distinct, are all dominant
monomials of solutions to the homogeneous linear differential equation
. Consequently, the dominant
monomials of these series, which are pairwise distinct, are all dominant
monomials of solutions to the homogeneous linear differential equation
 . But there are at most linearly independent solutions to this equation.
. But there are at most linearly independent solutions to this equation.
Proposition
such that the Newton degree of
 |
(34) |
is equal to . Then, for
 , we have
, we have
Proof. Without loss of generality, we may assume that
 ,
,  ,
,  , and
, and  are purely exponential,
that and that
are purely exponential,
that and that  .
From PU3 it follows that
.
From PU3 it follows that  is neither a
potential dominant monomial for
is neither a
potential dominant monomial for  ,
nor for
,
nor for  . Proposition 22, applied to
. Proposition 22, applied to  and the “non
potential dominant monomial” ,
therefore yields
and the “non
potential dominant monomial” ,
therefore yields
Consequently,

On the other hand, we have

so that
Now recall that  is the coefficient of
is the coefficient of  in
in  for some . It follows that
for some . It follows that
Now assume that is a monomial with  (so that
(so that  ).
Then we have
).
Then we have
We conclude that the degree of  can not exceed
can not exceed
 . If
is chosen such that (34) has Newton degree , it thus follows that
. If
is chosen such that (34) has Newton degree , it thus follows that
which completes the proof.
Proposition 29 shows that by taking sequences of partial
unravellings, we rapidly approach a total unraveling. The only problem
which still remains to be solved is the appearance of highly iterated
logarithms. We will first solve this problem in the particular case when
the Newton degree of coincides with its normal
degree. In the next subsection, we will show that the general case can
be reduced to this case.
In the sequel, we assume that (6) is an asymptotic
differential equation of degree and Newton degree , such that the following additional conditions are
satisfied for a certain purely exponential transbasis :
 has coefficients in .
has coefficients in .
 have coefficients in .
have coefficients in .
 admits only potential dominant monomials
in .
admits only potential dominant monomials
in .
The two first conditions can clearly be met after a sufficient number of upward shiftings. In section 9, we will show that this is also the case for the last condition.
Proposition  be a potential dominant term of multiplicity
for (6). Then
be a potential dominant term of multiplicity
for (6). Then
Modulo the insertion of new elements into , we have  .
.
There exists a unique  ,
such that either
,
such that either
 is a total unravelling and
is a total unravelling and  is
is  -minimal
in
-minimal
in  .
.
The Newton degree of  is .
is .
Proof. Let us first prove (a). If is differential, then E3 implies that is purely exponential, so  after a
suitable extension of . If
is algebraic, then
after a
suitable extension of . If
is algebraic, then  is
the
is
the  -equalizer for each
-equalizer for each  , since has
multiplicity . Proposition 21(a) implies that there exists a unique purely
exponential monomial
, since has
multiplicity . Proposition 21(a) implies that there exists a unique purely
exponential monomial  with
with  , such that
, such that  for all . More precisely, in the algorithm
in proposition 21(a), is
chosen such that
for all . More precisely, in the algorithm
in proposition 21(a), is
chosen such that  , whence
, whence
 for some
for some  ,
and
,
and  satisfies
satisfies  .
In particular, for
.
In particular, for  , this
yields
, this
yields  . We claim that
. We claim that  .
.
If  , then we have
, then we have  and
and  for all . Since
for all . Since  ,
this can only happen if
,
this can only happen if  .
Hence
.
Hence  is the
is the  -equalizer
w.r.t. for all and . If
-equalizer
w.r.t. for all and . If  , then E3 implies that is not a potential dominant monomial for
, then E3 implies that is not a potential dominant monomial for  . Consequently, the coefficients of
. Consequently, the coefficients of  and
and  in
in  both do not vanish. It follows that is the
both do not vanish. It follows that is the  -equalizer w.r.t.
and again .
-equalizer w.r.t.
and again .
We prove the existence of in (b) by
induction over ; the
uniqueness of follows from E3. If , then  clearly satisfies assumption ii. If ,
then we refine
clearly satisfies assumption ii. If ,
then we refine
and remark that  satisfies the hypothesis
E1, E2 and E3, due to part (a). Now consider
the equation
satisfies the hypothesis
E1, E2 and E3, due to part (a). Now consider
the equation
 |
(35) |
of Newton degree . If this
equation admits a potential dominant term  of
multiplicity with
of
multiplicity with  ,
then the induction hypothesis implies that there exists a
,
then the induction hypothesis implies that there exists a  , which satisfies the assumption i or
ii, and we may take
, which satisfies the assumption i or
ii, and we may take  .
If there does not exist such a potential dominant term , then there either do not exist potential
dominant terms of multiplicity at all for (35), so that i holds for
.
If there does not exist such a potential dominant term , then there either do not exist potential
dominant terms of multiplicity at all for (35), so that i holds for  ,
or such potential dominant terms do exist, and we have ii for
.
,
or such potential dominant terms do exist, and we have ii for
.
Given a potential dominant term  of multiplicity
, let
be as in proposition 30(b). In case i, we say
by convention that is an adjusted partial
unravelling. In case ii, let
of multiplicity
, let
be as in proposition 30(b). In case i, we say
by convention that is an adjusted partial
unravelling. In case ii, let
 |
(36) |
be a partial unraveling relative to the equation

and with as its associated monomial. Then we say
that

is an adjusted partial unravelling. Notice that a partial unravelling like (36) always exists, by propositions 28 and 30(a).
Notice also that we necessarily have  .
Indeed, consider the differential polynomial
with
.
Indeed, consider the differential polynomial
with  in PU1. Since
in PU1. Since  , this differential polynomial is actually linear.
Furthermore, since
, this differential polynomial is actually linear.
Furthermore, since  , the
coefficients of
, the
coefficients of  are in
are in  and the coefficients of
and the coefficients of  in
in  . We conclude that all solutions to
. We conclude that all solutions to  , and in particular
, and in particular  , are in .
A consequence of our observation is that
, are in .
A consequence of our observation is that  again
satisfies the hypotheses E1, E2 and E3, so that we
may consider sequences of adjusted partial unravellings.
again
satisfies the hypotheses E1, E2 and E3, so that we
may consider sequences of adjusted partial unravellings.
Proposition
is finite, say of length ,
and its composition

is a total unravelling.
Proof. Let  denote the length of
the sequence of adjusted partial unravellings. For each
denote the length of
the sequence of adjusted partial unravellings. For each  , let
, let  .
For each
.
For each  , let
, let  denote the exponentiality of
denote the exponentiality of  .
Given
.
Given  , proposition 29
implies that
, proposition 29
implies that

Since  and
and  ,
this yields
,
this yields

By induction, it follows that  .
We conclude that
.
We conclude that  . The
composition of the sequence of adjusted partial unravellings is clearly
a total unraveling.
. The
composition of the sequence of adjusted partial unravellings is clearly
a total unraveling.
Let us now return to the case of a general asymptotic differential
equation (6) of Newton degree .
Assume that (33) is a partial unravelling with  and that
and that  is a potential dominant
monomial of multiplicity for
is a potential dominant
monomial of multiplicity for
 |
(37) |
Modulo a sufficient number of upward shiftings, we may assume that  and the coefficients of can
be expanded w.r.t. a purely exponential transbasis . Let
and the coefficients of can
be expanded w.r.t. a purely exponential transbasis . Let  be the transbasis
element such that
be the transbasis
element such that  , and
consider the dominant part
, and
consider the dominant part  of
of  with respect to :
with respect to :
On the one hand, since  , we
have
, we
have

for all  , so that
, so that  . Consequently,
satisfies the conditions E1 and E2 from the previous
section; we will see in section 9 that it also satisfies
E3, modulo some additional upward shiftings. On the other hand,
the following proposition reduces the problem of determining the
unravellings for (6) to a similar problem for . In view of the previous section, this
completes the effective construction of unravellings.
. Consequently,
satisfies the conditions E1 and E2 from the previous
section; we will see in section 9 that it also satisfies
E3, modulo some additional upward shiftings. On the other hand,
the following proposition reduces the problem of determining the
unravellings for (6) to a similar problem for . In view of the previous section, this
completes the effective construction of unravellings.
Proposition
 |
(38) |
with  is a total unravelling w.r.t.
is a total unravelling w.r.t.
 |
(39) |
is a total unravelling w.r.t. the equation
 |
(40) |
Proof. Modulo a multiplicative conjugation, we may
assume without loss of generality that  .
Now if (38) is an unravelling, then proposition 29
implies that
.
Now if (38) is an unravelling, then proposition 29
implies that
so that  . Actually, in the
proof of proposition 29 we showed that
. Actually, in the
proof of proposition 29 we showed that
so that  . We infer that
. We infer that  for all
for all  with
with  . In other words, for (39) to be
an unravelling, it is again necessary that .
. In other words, for (39) to be
an unravelling, it is again necessary that .
The above argument shows that it suffices to prove the equivalence under
the assumption that . Now we
notice that for each transseries  and each
monomial
and each
monomial  , the dominant parts
of
, the dominant parts
of  and
and  w.r.t. coincide. Consequently,
w.r.t. coincide. Consequently,
for such and  .
In particular, we have
.
In particular, we have
for all  sufficiently close to , so that the Newton degrees of
sufficiently close to , so that the Newton degrees of
and

coincide. Hence U1 holds for (38) if and only if it
holds for (39). Similarly, for all  , such that
, such that  ,
the Newton degrees of
,
the Newton degrees of
 |
(41) |
and
 |
(42) |
coincide. Furthermore, for a similar reason as above, the Newton degrees
of (41) and (42) are both bounded by if  . In other
words, U2 holds for (38) if and only if it holds for
(39). We conclude that (38) is a total
unravelling w.r.t. (37) if and only if (39) is
a total unravelling w.r.t. (37).
. In other
words, U2 holds for (38) if and only if it holds for
(39). We conclude that (38) is a total
unravelling w.r.t. (37) if and only if (39) is
a total unravelling w.r.t. (37).
One of the easiest examples which illustrates the importance of unravellings is
 |
(43) |
where  . This equation admits
as it's unique potential dominant term of
multiplicity
. This equation admits
as it's unique potential dominant term of
multiplicity  . However, the
refinement
. However, the
refinement
leads to the equation

which again admits a unique potential dominant term  of multiplicity . Continuing
like this leads to an infinite sequence
of multiplicity . Continuing
like this leads to an infinite sequence  ,
,
 of refinements, and we do not succeed in
separating the two solutions.
of refinements, and we do not succeed in
separating the two solutions.
Therefore, we rather construct a total unravelling. In order to do so,
we first compute the distinguished solution  to
the quasi-linear differential equation
to
the quasi-linear differential equation

and then refine

This refinement (and partial unravelling with associated monomial ) is actually already the total
unravelling we were looking for and the equation (43)
transforms into

This time, the new equation admits two potential dominant terms  and
and  of multiplicities
of multiplicities  , which allows us to compute the
solutions to (43) by recursion.
, which allows us to compute the
solutions to (43) by recursion.
In general, total unravellings can only be achieved via successions of partial unravellings. An important example which illustrates this phenomenon is the following:
 |
(44) |
This equation becomes purely exponential after  upward shiftings:
upward shiftings:
 |
(45) |
This new equation admits a unique potential dominant monomial  of multiplicity .
Indeed, this is easily seen when substituting
of multiplicity .
Indeed, this is easily seen when substituting  for :
for :
 |
(46) |
Now  is a partial unravelling w.r.t. (46)
and
is a partial unravelling w.r.t. (46)
and  a partial unravelling w.r.t. (45).
However, the partial unravelling transforms (46) into an
equation of the same form as (45), but with decreased by .
Consequently, we need a succession of
unravellings
a partial unravelling w.r.t. (45).
However, the partial unravelling transforms (46) into an
equation of the same form as (45), but with decreased by .
Consequently, we need a succession of
unravellings

in order to attain the total unravelling
Notice that the ratios  of the successive
potential dominant terms indeed satisfy proposition 29.
of the successive
potential dominant terms indeed satisfy proposition 29.
An open question is whether there exist examples which essentially need the technique of adjusted partial unravellings in order to limit the appearance of iterated logarithms. If not, this would allow some major simplifications in the algorithm solve in the next section. Actually, the whole computation process of total unravellings needs to be better understood in order to generalize it to other fields of transseries (see section 9.5).
In this section, we give algorithms to solve an asymptotic differential
equation (6), where the coefficients of
and  can be expanded with respect to a
parameterized transbasis .
Actually, we show how to solve such an equation modulo a transmonomial
can be expanded with respect to a
parameterized transbasis .
Actually, we show how to solve such an equation modulo a transmonomial
 . Here a solution modulo
to (6) is a transseries
. Here a solution modulo
to (6) is a transseries  , such that the Newton degree of
, such that the Newton degree of
 is strictly positive. In our algorithms, we will
use the following conventions without further mention.
is strictly positive. In our algorithms, we will
use the following conventions without further mention.
to (6)
occurs in precisely one case. In other words, for each specialization
of the initial parameters and, for each specialization of the
directions (which corresponds to a choice of a field of transseries
as in section 2, which satisfies
the constraints on the )
and for each solution in , there exists precisely one case and
precisely one specialization of the newly introduced parameters, which
yields as a solution.
The termination of our non deterministic algorithm follows from the termination of each of its branches by a similar Noetherianity argument as in the proof of theorem 17. For more details about the automatic case separation strategy, see chapter 8 in [vdH97].
 . In order to do this, we are allowed to
insert new elements into and to “shift
the whole computation upwards” whenever necessary. Upward
shifting can for instance be implemented via an exception, which
starts over the whole non deterministic computation, after shifting
the input upwards. A better strategy, which consists of associating an
“exponential level” to each transseries, is explained in
more detail on page 276 of [vdH97].
. In order to do this, we are allowed to
insert new elements into and to “shift
the whole computation upwards” whenever necessary. Upward
shifting can for instance be implemented via an exception, which
starts over the whole non deterministic computation, after shifting
the input upwards. A better strategy, which consists of associating an
“exponential level” to each transseries, is explained in
more detail on page 276 of [vdH97].
 resp.
resp.  ,
as well as monomials of the form
,
as well as monomials of the form  .
.
In order to get a parameterized version of theorem 24, we
have to make sure that the operator  is well
defined. This can be done as follows:
is well
defined. This can be done as follows:
Algorithm linear
Input A linear differential operator
and transseries 
Output The distinguished solution
to 
Step 1 [Introduce generic monomial]
Let denote the current purely exponential
transbasis
Let be temporary new
parameters in and set 
Step 2 [Compute the distinguished solution]
Uniformly regularize
Let  , with the notations
from the proof of theorem 24
, with the notations
from the proof of theorem 24
Step 3 [Clean up]
Destroy the parameters by projection of the
regions
Return
In the algorithm, the uniform regularization of a differential operator
or polynomial means that we uniformly regularize all its coefficients
and that we make the corresponding dominant monomials pairwise
comparable for using theorem 17 and
lemma 15.
In the parameterized context, the equation (6) has a Newton
degree , if each
specialization of the directions and parameters leads to an equation of
Newton degree . We will show
below how to compute the Newton degree modulo case separations. The
distinguished solution to a quasi-linear equation (i.e. of Newton degree
) is computed inductively as
in the proof of theorem 26. The dominant part of w.r.t.  is computed by the usual
formula after the uniform regularization of .
is computed by the usual
formula after the uniform regularization of .
Algorithm quasi_linear
Input
An integer  (with as
default value), a differential polynomial with
coefficients in
(with as
default value), a differential polynomial with
coefficients in  and a monomial
and a monomial  , such that (6) is quasi-linear
, such that (6) is quasi-linear
Output The distinguished solution to (6)
Step 1 [Normalize]
If  , then return
, then return  times quasi_linear
times quasi_linear
Uniformly regularize
If  then return quasi_linear
then return quasi_linear
Step 2 [Recurse]
Compute the dominant part of
w.r.t.
Let 
Step 3 [Return]
Return  , with the notations
from the proof of theorem 26
, with the notations
from the proof of theorem 26
The -equalizer of a
differential polynomial is computed similarly as
in the proof of proposition 21, by uniformly regularizing
and at each recursion.
Algorithm equalizer
Input A differential polynomial
and integers 
Output The  -equalizer
for
-equalizer
for
Step 1 [regularize]
Uniformly regularize and
Step 2 [equalize]
Let 
If  then return
then return 
Step 3 [shift upwards]
If  and
and  ,
then return
,
then return
Shift upwards and return to step 2
The analogue of the Newton polygon associated to an algebraic
differential equation in the differential case is the determination of
-equalizers, which occur as
potential dominant monomials, and which are extremal in the sense that
 is maximal. These equalizers correspond to the
slopes of the Newton polygon and the and to the first coordinates.
is maximal. These equalizers correspond to the
slopes of the Newton polygon and the and to the first coordinates.
Algorithm Newton_polygon
Input A differential polynomial
Output
Indices  and potential dominant monomials
and potential dominant monomials  for ,
such that
for ,
such that  is the
is the  -equalizer
for for each
-equalizer
for for each
Step 1 [Initialize]
Step 2 [Insert vertex]
If  then return
then return  and
and

Step 3 [Search edge]
Compute  for all
for all  with
with
Let  and let
and let  be minimal
with
be minimal
with  .
.
Set  and go to step 2
and go to step 2
The Newton degree of (6) can easily be read from the Newton polygon:
Algorithm Newton_degree
Input A differential polynomial
and a monomial
Output The Newton degree of 
Compute and  by
Newton_polynomial
by
Newton_polynomial
Let  be maximal, such that
be maximal, such that 
Return 
Given the Newton polygon associated to ,
let us now show how to determine the potential dominant terms of
solutions to (6) and their multiplicities. We separate a
case for each edge and each vertex of the Newton polygon, and determine
the corresponding algebraic or mixed resp. differential potential
dominant monomials and terms. In order to determine the differential
potential dominant monomials, we recursively have to solve Ricatti
equations modulo  . The
algorithm solve which does this will be specified in the next
section.
. The
algorithm solve which does this will be specified in the next
section.
Algorithm pdt [non
deterministic]
Input A differential polynomial
and a monomial
Output A potential dominant term
for (6)
Step 1 [Determine Newton degree]
Compute and by
Newton_polygon
Choose a , such that  or , and
set
or , and
set 
If then go to step 3
Separate two cases and go to step 2 resp. 3
Step 2 [Algebraic and mixed potential dominant terms]
Let 
Let be a new parameter in
Impose the constraint  (as an algebraic
constraint, since
(as an algebraic
constraint, since  )
)
Return
Step 3 [Differential but non mixed potential dominant terms]
Let 
Let  , where the integral is
computed using linear
, where the integral is
computed using linear
If  then impose the constraint
then impose the constraint 
Otherwise impose the constraint
If  then impose the constraint
then impose the constraint 
Let be a new parameter in
and impose the constraint 
Return
Algorithm multiplicity
Input A differential polynomial
and a term
Output The multiplicity of  as
a root of
as
a root of 
Repeat
Uniformly regularize 
If  then shift upwards
then shift upwards
Until 
Return the multiplicity of  as a root of
as a root of 
We can now state the main resolution algorithm for solving asymptotic
algebraic differential equations (6) modulo monomials .
Algorithm solve
Input A differential polynomial
and monomials and
Output A solution to  modulo
modulo
Step M1 [Initialize]

mode normal
normal
Step M2 [Are we done?]
If Newton_degree ,
then separate two cases and respectively
,
then separate two cases and respectively
1. Return
2. Proceed with step M3
Step M3 [Compute potential dominant term]
Let 
Let 
If  then kill this process
then kill this process
Step M4 [Does have
multiplicity  ?]
?]
If  then
then


modenormal
Go to step M2
Step M5 [Dispatch on mode]
If mode normal then go to step H1
normal then go to step H1
If modeunravel then go to step H3
If modeadjust then go to step U4
Step H1 [Prepare first step unravelling loop]
modeunravel
serialhead
Step H2 [Prepare partial unravelling loop]
While  shift upwards
shift upwards
If  with
with  then
then 
Otherwise 
Step H3 [Partial unravelling]
If  then
then


Go to step M2
Step H4 [Dispatch on serial]
If serialhead then go to step T1
If serialtail then go to step T2
Step T1 [Prepare other steps unravelling loop]
Let be such that 
Uniformly regularize 
Compute the dominant part  of
w.r.t. and set
of
w.r.t. and set 

serialtail
Step T2 [Prepare next step unravelling loop]
If there is no purely exponential monomial in
 with
with  ,
then set
,
then set
Let be a purely exponential monomial in , such that 
modeadjust
Step T3 [Adjust partial unravelling]
If  then
then
Go to step M2
If  then
then
modeunravel
Go to step H3
The algorithm solve gradually constructs a solution modulo to (6) via a
succession of refinements. Each time we get back to the main entry
M2 of the loop, we actually have to solve the equation  . Given a potential dominant term
for this equation, the next refinement (and
value of ) depends on the
mode variable.
. Given a potential dominant term
for this equation, the next refinement (and
value of ) depends on the
mode variable.
The core of the algorithm consists of steps M1-M5 in which case
mode normal. As long as we do not
hit a potential dominant term of maximal
multiplicity , the algorithm
only executes steps M1-M5. Given a potential dominant term of multiplicity ,
we can simply take
normal. As long as we do not
hit a potential dominant term of maximal
multiplicity , the algorithm
only executes steps M1-M5. Given a potential dominant term of multiplicity ,
we can simply take  for our refinement, which
corresponds to the assignments
for our refinement, which
corresponds to the assignments  and in step M4.
and in step M4.
The steps H1-H4 correspond to the first partial unravelling when
we hit a potential dominant term of maximal
multiplicity . As long as we
do not enter T1-T3, we will have  ,
modeunravel and serialhead. We start by computing the differential
polynomial from section 7.2 (modulo
an additive conjugation by ).
We then keep refining
,
modeunravel and serialhead. We start by computing the differential
polynomial from section 7.2 (modulo
an additive conjugation by ).
We then keep refining  as far as possible in step
H3, where is the distinguished solution to the
quasi-linear equation
as far as possible in step
H3, where is the distinguished solution to the
quasi-linear equation  .
.
If the steps H1-H4 do not lead to a complete unravelling, we
apply the theory from sections 7.3 and 7.4 in
steps T1-T3. We start by computing once and for all the
differential polynomial in T1, with this
change that we apply a multiplicative and additive conjugation to it in
order to make it “compatible” with . The transseries  ,
which is initialized with ,
may become an iterated exponential
,
which is initialized with ,
may become an iterated exponential  as a result
of upward shiftings. As long as the current potential dominant term has not yet the required form in order to start a
partial unravelling, we have modeadjust,
and we keep on adjusting in step T3.
as a result
of upward shiftings. As long as the current potential dominant term has not yet the required form in order to start a
partial unravelling, we have modeadjust,
and we keep on adjusting in step T3.
The termination of solve is guaranteed by propositions 23
and 31, modulo the hypothesis that the resolution process
requires only a finite number  of upward
shiftings. An upper bound for will be given in
the next section.
of upward
shiftings. An upper bound for will be given in
the next section.
The following main theorem describes the general form of solutions to asymptotic algebraic differential equations (6) with parameterized complex transseries coefficients.
Theorem  to
to
The logarithmic depths of do not exceed
the logarithmic depths of the coefficients of
by more than a fixed constant  ,
which only depends on the Newton degree , the order and the
weight
,
which only depends on the Newton degree , the order and the
weight  of
of
For each specialization of the parameters occurring in the
coefficients of , for
each specialization of the directions, and for each solution to  and exactly one specialization of the remaining parameters on
which depends , for
which specializes to .
and exactly one specialization of the remaining parameters on
which depends , for
which specializes to .
Proof. In view of the algorithm from the previous
section, we only have to prove (a). We prove the bounds for  by a double induction over
and . For
by a double induction over
and . For  , we necessarily have
, we necessarily have  , and clearly
, and clearly  .
So assume that
.
So assume that  . If
. If  , then (6) has no
solutions, so that
, then (6) has no
solutions, so that  . Assume
therefore that
. Assume
therefore that  .
.
We first observe that the number of upward shiftings needed to compute a potential dominant term is bounded by
by propositions 21(b), 22 and the
induction hypothesis. We have to estimate the maximal number of upward
shiftings which may occur in the main loop of solve, before we
reach a lower Newton degree. Now the first partial unravelling requires
at most  upward shiftings, in view of remark 27. By the induction hypothesis and proposition 30,
the second loop of adjusted partial unravellings requires at most
upward shiftings, in view of remark 27. By the induction hypothesis and proposition 30,
the second loop of adjusted partial unravellings requires at most  upward shiftings. Finally, the decisive refinement,
which decreases the Newton degree, again needs at most
upward shiftings. Finally, the decisive refinement,
which decreases the Newton degree, again needs at most  upward shiftings. Altogether, we obtain
upward shiftings. Altogether, we obtain
Consequently,

In particular, for  , we
obtain
, we
obtain
For  , we obtain
, we obtain
By induction, we finally notice that

which implies our bound.
Remark for particular
values of  and
and  .
First of all, in the case when ,
it is easily checked that upward shifting is
sufficient in proposition 21(b), so that
.
First of all, in the case when ,
it is easily checked that upward shifting is
sufficient in proposition 21(b), so that
This observation implies the sharper bounds
for . A careful analysis of
the differential Newton polygon method will probably lead to even
sharper bounds for small values of .
Similarly, it is possible to improve the bounds for small values of
, by using the fact that the
weight of is bounded by  for
for  .
.
Although the above theorem describes the general form of solutions to
(6), it does not claim the actual existence of such
solutions. We say that is a solution of
multiplicity of (6), if the
differential valuation of equals . The following theorem stipulates the
existence of solutions to (6) of a very special form.
Theorem and whose coefficients can be
expanded w.r.t. a transbasis  .
Then there exist at least solutions to
.
Then there exist at least solutions to  for some .
for some .
Proof. Without loss of generality, we may assume that
 . Let us prove the theorem by
induction over . For we have nothing to prove. For
. Let us prove the theorem by
induction over . For we have nothing to prove. For  , the equation is quasi-linear and the distinguished
solution can be expanded w.r.t.
, the equation is quasi-linear and the distinguished
solution can be expanded w.r.t.  .
Assume therefore that
.
Assume therefore that  .
.
If there exists only one algebraic potential dominant term with
multiplicity , then consider
the unravelling we obtain by executing
solve, but where we always choose the unique algebraic
potential dominant term in pdt. Since this branch only involves
the computation of equalizers and solutions of quasi-linear equations,
can be expanded w.r.t. a transbasis of the form
 . Modulo replacing by , we may
thus assume without loss of generality that (6) admits no
algebraic potential dominant terms of multiplicity .
. Modulo replacing by , we may
thus assume without loss of generality that (6) admits no
algebraic potential dominant terms of multiplicity .
If there exists a mixed potential dominant monomial , then is a potential
dominant term of multiplicity for each , and the coefficients of  can be expanded w.r.t.
can be expanded w.r.t.  .
By the induction hypothesis each equation
.
By the induction hypothesis each equation  admits
at least one solution which can be expanded w.r.t.
for some . Hence, there
exists an infinity of solutions with the required properties. In what
follows, we therefore assume that all potential dominant monomials are
algebraic, but not mixed.
admits
at least one solution which can be expanded w.r.t.
for some . Hence, there
exists an infinity of solutions with the required properties. In what
follows, we therefore assume that all potential dominant monomials are
algebraic, but not mixed.
Now let  and
and  be such that
is the -equalizer
for each
be such that
is the -equalizer
for each  . For each the Newton polynomial
. For each the Newton polynomial  is a
polynomial with valuation
is a
polynomial with valuation  and degree , which has
and degree , which has  roots (when counting with multiplicities). These root induce at least
roots (when counting with multiplicities). These root induce at least
 potential dominant terms, which can be expanded
w.r.t. , and whose
multiplicities are . By
proposition 23 and the induction hypothesis, this leads to
at least solutions of the required form, when
counting with multiplicities. The theorem now follows from the fact that
is a solution of multiplicity
potential dominant terms, which can be expanded
w.r.t. , and whose
multiplicities are . By
proposition 23 and the induction hypothesis, this leads to
at least solutions of the required form, when
counting with multiplicities. The theorem now follows from the fact that
is a solution of multiplicity  .
.
We recall that a differential field  is said to
be differentially algebraically closed, if for any pair
is said to
be differentially algebraically closed, if for any pair  of differential polynomials over , such that the order of is
strictly larger than the order of ,
there exists a root of in , which is not a root of .
of differential polynomials over , such that the order of is
strictly larger than the order of ,
there exists a root of in , which is not a root of .
Let be a field of complex transseries as in
section 2. Unfortunately, theorem 35 is not
sufficient for to be differentially
algebraically closed. Indeed, the only transseries solutions for the
elliptic equation
are ,  and
and  . Consequently, there are
no transseries solutions to this equation, which are not solutions of
the equation of lower order
. Consequently, there are
no transseries solutions to this equation, which are not solutions of
the equation of lower order
Nevertheless, theorem 35 is sufficient for the following application.
Theorem be a linear differential operator of order with coefficients in .
Then
can be completely factored over .
There exist linearly independent solutions
to  in .
in .
Proof. By theorem 35 the Ricatti equation
associated to has at least one solution  . Consequently, we may factor
. Consequently, we may factor
for some linear differential operator  of lower
order
of lower
order  and coefficients in . Part (a) now follows by induction over
.
and coefficients in . Part (a) now follows by induction over
.
Now consider a factorization
 |
(47) |
with  and let
and let

where  stands for distinguished integration. Then
stands for distinguished integration. Then
 . Moreover, by the
distinguished properties of the left inverses
. Moreover, by the
distinguished properties of the left inverses  , we have
, we have

for all  . This guarantees the
linear independence of
. This guarantees the
linear independence of  .
Indeed assume that there exists a relation
.
Indeed assume that there exists a relation
with  . Then
. Then  . This contradiction completes the proof of
(b).
. This contradiction completes the proof of
(b).
Remark  , we even obtain the canonical basis of solutions of
in the proof of theorem 36.
, we even obtain the canonical basis of solutions of
in the proof of theorem 36.
Remark

or
Although the algorithm solve provides us with the generic
solution to (6), it is not clear a priori that the
number of new parameters on which the solution depends does not exceed
. In this section we sketch a
proof of the fact that the number of such integration constants is
indeed bounded by .
We first notice that the only place where we introduce (continuous)
integration constants is in step 3 of pdt. Each integration
constant can therefore be “attached”
to a solution of a Ricatti equation of the form  . Given an arbitrary moment during the algorithm
solve, we actually search solutions of the form
. Given an arbitrary moment during the algorithm
solve, we actually search solutions of the form
where  are the “active integration
constants”. The idea is now to set
are the “active integration
constants”. The idea is now to set
and to consider as a differential polynomial of
order  in ,
with coefficients in
in ,
with coefficients in  . In
other words, we consider
. In
other words, we consider  as new monomials and we
give
as new monomials and we
give  the natural “pointwise”
quasi-ordering (see chapter 6 of [vdH97]).
the natural “pointwise”
quasi-ordering (see chapter 6 of [vdH97]).
The only obstruction for the computation with coefficients in instead of coefficients in is when
the uniform regularization of a transseries in
is not possible. Now this obstruction corresponds to the imposition of
an algebraic constraint on an active integration constant  , when performing the same computation in . In order to solve this problem,
an “error handler” is installed each time that we introduce
a new continuous integration constant .
Whenever we impose an algebraic constraint on , we go back to the error handler and reperform the
same computations while assuming that either did
or did not (non determinism) satisfy the algebraic constraint right from
the start.
, when performing the same computation in . In order to solve this problem,
an “error handler” is installed each time that we introduce
a new continuous integration constant .
Whenever we impose an algebraic constraint on , we go back to the error handler and reperform the
same computations while assuming that either did
or did not (non determinism) satisfy the algebraic constraint right from
the start.
In all branches of the new resolution process, the order of the
asymptotic differential equation, when rewritten as an equation in , does not exceed . Consequently,  at the
end of each branch of the process.
at the
end of each branch of the process.
The reader may have noticed a certain number of changes with respect to the treatment of algebraic different equations in [vdH97]. Although the results of this paper were stated in the context of grid-based transseries, they may easily be adapted to the well-ordered context from [vdH97], except for the results about parameterized transseries, which become more complicated. The algorithm solve may still be applied in the well-ordered context, except that the introduction of new parameters should then be interpreted as a new source of (continuous) case separations.
During a careful reexamination of our previous work, we noticed that
proposition 5.7(c) in [vdH97] does not hold for all
 . Consequently, our previous
treatment of almost double solutions in section 5.5.1 does not work. The
present, more complicated, treatment using unravellings corrects this
error. When calling a refinement occurring in our construction of a
total unravelling a privileged refinement, the proof of theorem
5.2 in [vdH00a] remains correct (except for the bound for
the maximal length of a chain of privileged
refinements, which may have to be replaced by a larger bound).
. Consequently, our previous
treatment of almost double solutions in section 5.5.1 does not work. The
present, more complicated, treatment using unravellings corrects this
error. When calling a refinement occurring in our construction of a
total unravelling a privileged refinement, the proof of theorem
5.2 in [vdH00a] remains correct (except for the bound for
the maximal length of a chain of privileged
refinements, which may have to be replaced by a larger bound).
Some other changes with respect our previous work are the following:
In view of theorem 3.3 in [vdH00a] it is no longer necessary to develop the theory from section 5 in the purely exponential setting first (as we did in [vdH97]).
We simplified and improved the construction of distinguished solutions to linear and quasi-linear equations, through a new application of the generalized implicit function theorem from [vdH00b].
In comparison with the effective asymptotic resolution of algebraic differential equations in chapter 12 from [vdH97], we noticed that we actually never need to impose exponential constraints on the parameters. After correcting the error related to privileged refinements, we therefore no longer need to assume the existence of an oracle to determine the consistency of first order systems of exp-log constraints in theorem 12.4.
In the corrected version, we also consider the case when  with
with  . We
forgot that case in the original version.
. We
forgot that case in the original version.
In this paper, we have generalized the transseries technique for solving algebraic differential equation as far as reasonably possible. Three main problems remain to be solved.
We have to show that a consistent system of asymptotic constraints on the directions corresponds to a non empty asymptotic region of the complex plane. In general, this region does not need to be connected.
We have to give an analytic meaning to our transseries solutions on regions as above. This analytic meaning should be compatible with the asymptotic relations, which have in particular to be formalized on disconnected regions.
In order to solve an equation like
one may start with studying the solutions in
the neighbourhoods of singularities other than  . This can be done by performing a change
of variable
. This can be done by performing a change
of variable  , which
transforms the equation into an equation which does admit a solution
space of dimension .
, which
transforms the equation into an equation which does admit a solution
space of dimension .
More generally, for a general asymptotic algebraic differential
equation (6), the above trick leads to transseries
solutions in  , where
, where  is the original variable, and
is the original variable, and
It is not yet clear to us how to alternate usual refinements with
substitutions of the form .
Assuming for simplicity that has constant
coefficients, one may also start with studying the singularities of
the dynamical system associated to the algebraic differential
equation. For instance, one may use the theory from chapter 10 in
[vdH97] to desingularize as a
polynomial in  . This
leads to a better understanding of the behaviour of the dynamical
system for different subregions of “the
. This
leads to a better understanding of the behaviour of the dynamical
system for different subregions of “the  -space”. We next apply the asymptotic
tools from this paper to obtain full solutions on these regions.
Finally, one has to study how the solutions globally glue together.
-space”. We next apply the asymptotic
tools from this paper to obtain full solutions on these regions.
Finally, one has to study how the solutions globally glue together.
In any case, a purely local treatment seems not to be possible in order to describe all solutions to an algebraic differential equation. A good combination of a more global theory with our local results might lead to the resolution of interesting questions, such as
Is it possible for an analytic solution to an algebraic differential
equation with coefficients in to admit a
natural boundary somewhere on its Riemann surface?
For Liouvillian functions and, in view of the theorem 36, for functions which are obtained via the repeated resolution of linear differential equations, the answer seems to be negative.
do not necessarily
admit finite logarithmic depths. A typical example of an equation
which is “hard to unravel” is

A good question is whether there are essentially different examples of equations which are hard to unravel. Another question is whether we may avoid the adjusted partial unravellings from section 7.3.
B. I. Dahn and H. Wolter. Ordered fields with several exponential functions. Z. Math. Logik Grundlag. Math., 30(4):341–348, 1984.
J. Écalle. Introduction aux fonctions analysables et preuve constructive de la conjecture de Dulac. Hermann, collection: Actualités mathématiques, 1992.
J. van der Hoeven. Automatic asymptotics. PhD thesis, École polytechnique, France, 1997.
Joris van der Hoeven. A differential intermediate value theorem. Technical Report 2000-50, Univ. d'Orsay, 2000.
Joris van der Hoeven. Operators on generalized power series. Journal of the Univ. of Illinois, 2000. Submitted.
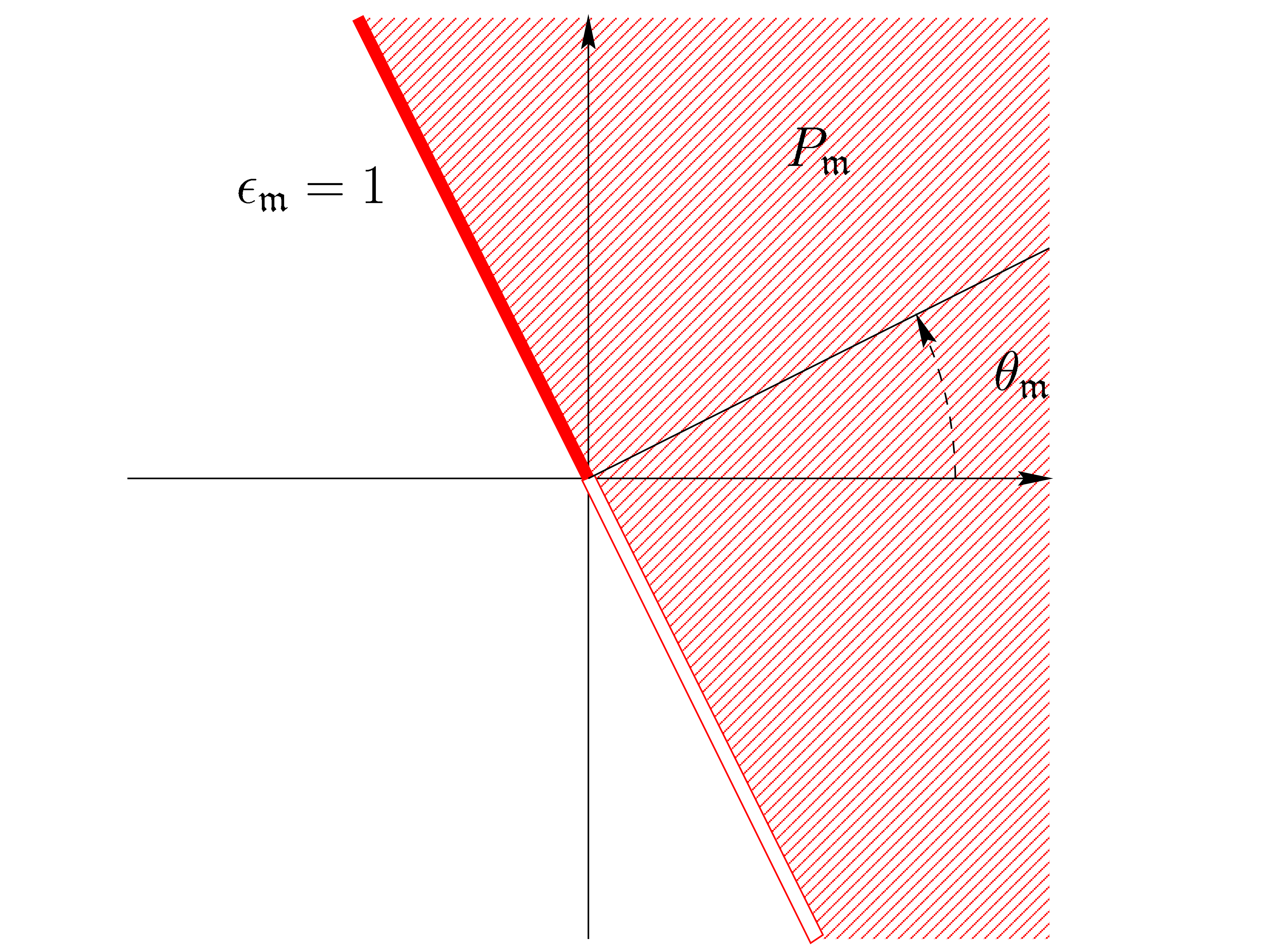
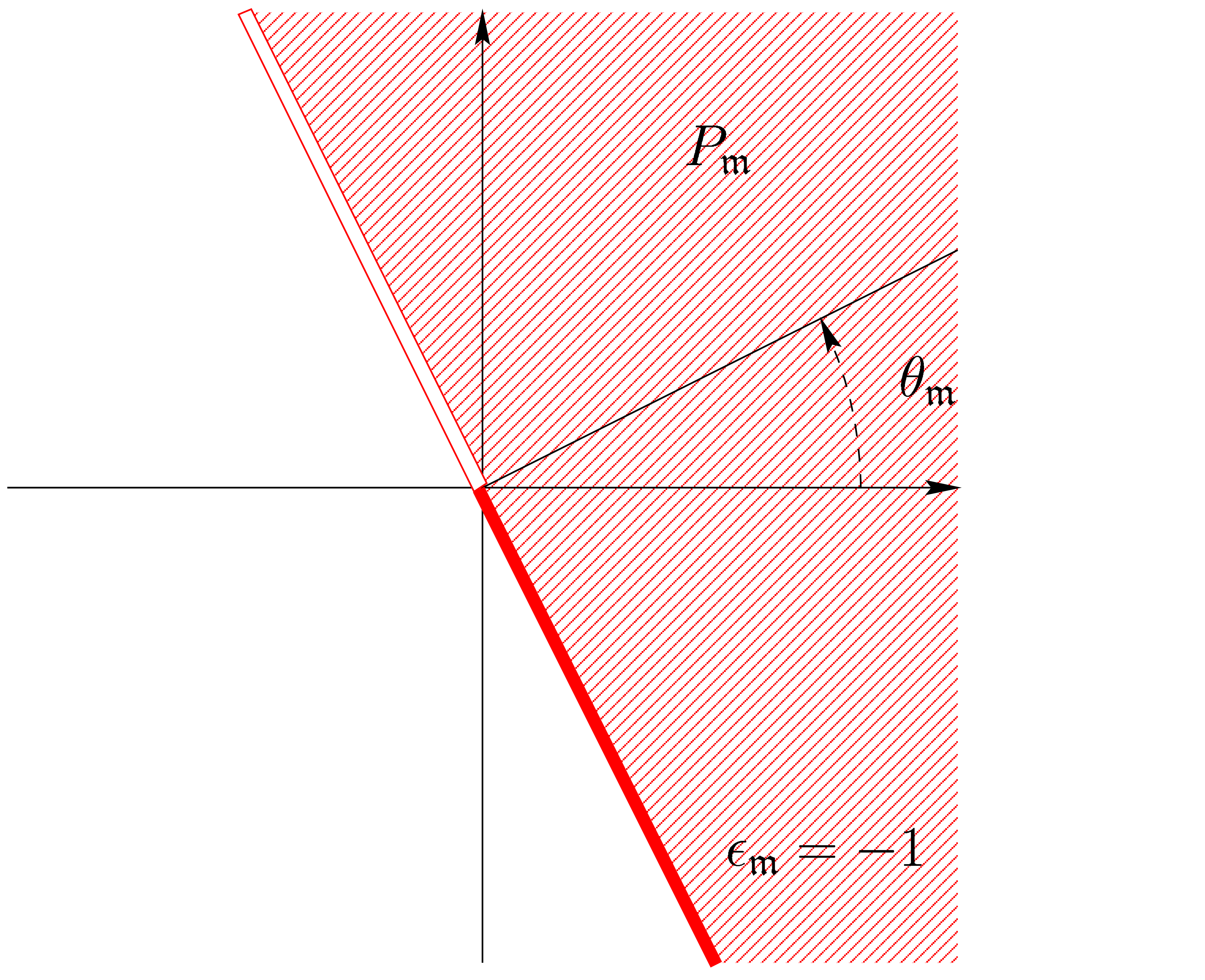
 resp.
resp.  .
. ,
,