 be an effective field. This means
that we have a data structure for representing elements of , together with algorithms for performing the
field operations. Consider a homogeneous system of polynomial equations
be an effective field. This means
that we have a data structure for representing elements of , together with algorithms for performing the
field operations. Consider a homogeneous system of polynomial equations
|
We present a probabilistic Las Vegas algorithm for solving sufficiently generic square polynomial systems over finite fields. We achieve a nearly quadratic running time in the number of solutions, for densely represented input polynomials. We also prove a nearly linear bit complexity bound for polynomial systems with rational coefficients. Our results are obtained using the combination of the Kronecker solver and a new improved algorithm for fast multivariate modular composition.
|
Let be an effective field. This means
that we have a data structure for representing elements of , together with algorithms for performing the
field operations. Consider a homogeneous system of polynomial equations

where  . We are interested in
the exact resolution of such a system through the computation of a
parametrization of its zero-set by a so-called primitive
element; see section 4.2 for a precise definition.
. We are interested in
the exact resolution of such a system through the computation of a
parametrization of its zero-set by a so-called primitive
element; see section 4.2 for a precise definition.
Throughout this paper, we assume that  are given
in standard dense representation. The total degree of each
are given
in standard dense representation. The total degree of each  is written
is written  ,
and we let
,
and we let  . Our algorithm
requires the following regularity conditions:
. Our algorithm
requires the following regularity conditions:
The intermediate ideals  are absolutely radical, which means radical over the
algebraic closure
are absolutely radical, which means radical over the
algebraic closure  of , for
of , for  ;
;
Conditions admit random coefficients. Under these conditions it
is well known that the system  admits exactly
admits exactly
 geometrically regular solutions in the
projective space
geometrically regular solutions in the
projective space  over . Condition
over . Condition
We prove new probabilistic complexity bounds for computing all the
solutions in terms of a univariate parametrization by a primitive
element. For finite fields ,
our bound is arbitrarily close to quadratic in the number of the
solutions whenever  : see
Corollary 5.5. For rational coefficients of bounded height,
we deduce a complexity bound that is nearly linear in the expected bit
size of the output of the algorithm: see Theorem 6.11.
These results improve upon the best previously known complexity bounds.
: see
Corollary 5.5. For rational coefficients of bounded height,
we deduce a complexity bound that is nearly linear in the expected bit
size of the output of the algorithm: see Theorem 6.11.
These results improve upon the best previously known complexity bounds.
We set  . In order to simplify
the presentation of complexity bounds, we use soft-Oh notation:
. In order to simplify
the presentation of complexity bounds, we use soft-Oh notation:
 means that
means that  ;
see [21, chapter 25, section 7] for technical details. The
least integer larger or equal to
;
see [21, chapter 25, section 7] for technical details. The
least integer larger or equal to  is written
is written
 ; the largest one smaller or
equal to is written
; the largest one smaller or
equal to is written  .
.
The -vector space of
polynomials of degree  is written
is written  . The remainder of the division of
. The remainder of the division of  by
by  is written
is written  . In order to express that an expression
. In order to express that an expression  is explicitly computed modulo , we write
is explicitly computed modulo , we write  .
.
The Galois ring of characteristic  and
cardinality
and
cardinality  , written
, written  , is defined as
, is defined as

with  monic and irreducible modulo
monic and irreducible modulo  .
.
The complexity of polynomial system solving is a central question in
effective algebraic geometry, which is still open. Except in some very
special cases, no softly linear time algorithms are known. In order to
simplify the discussion, we assume that  for
.
for
.
One known favorable special case concerns systems of bounded degrees
over  that satisfy
that satisfy  . This
solver is probabilistic of Las Vegas type, with a well understood
probability of failure that can easily be made arbitrarily small in
practice; for details, see the recent work by Giménez and Matera
[22]. The Kronecker algorithm has a long history, lying
deep in Kronecker's work [44], but it emerged after a
series of seminal articles by Giusti, Heintz, Matera, Morais, Pardo, and
their collaborators in the nineties [24–26];
for the history of this algorithm along with references, we refer to the
introduction of [18].
. This
solver is probabilistic of Las Vegas type, with a well understood
probability of failure that can easily be made arbitrarily small in
practice; for details, see the recent work by Giménez and Matera
[22]. The Kronecker algorithm has a long history, lying
deep in Kronecker's work [44], but it emerged after a
series of seminal articles by Giusti, Heintz, Matera, Morais, Pardo, and
their collaborators in the nineties [24–26];
for the history of this algorithm along with references, we refer to the
introduction of [18].
Assume that the input polynomials are given as a straight-line program
of size  over without
division (see the definition in [13] for instance) and that
we use the computation tree model for our complexity measures. If the
cardinality of is sufficiently large and the
conditions
over without
division (see the definition in [13] for instance) and that
we use the computation tree model for our complexity measures. If the
cardinality of is sufficiently large and the
conditions
 |
(1.1) |
operations in and with a uniformly bounded
probability of failure. The complexity bound  ; this is
detailed in section 5 below. If the
are all bounded, then we notice that
; this is
detailed in section 5 below. If the
are all bounded, then we notice that  ,
so the bound
,
so the bound  is
bounded, we rather have
is
bounded, we rather have  , so
the bound
, so
the bound
Gröbner bases constitute another cornerstone for polynomial system
solving. Algorithms in this setting are usually deterministic, but their
complexities are highly intricate in general: they depend on both the
system and the admissible ordering attached to monomials. Complexities
of unfavourable cases are doubly exponential in ; see a summary of known families in [21,
chapter 21]. The first simply exponential bounds of the form  for zero dimensional systems are due to Giusti, Lazard and
Lakshman in the eighties [23, 45–48]. The constant hidden behind the latter “
for zero dimensional systems are due to Giusti, Lazard and
Lakshman in the eighties [23, 45–48]. The constant hidden behind the latter “ ” may be related to a feasible exponent
” may be related to a feasible exponent
 for linear algebra, in the sense that any two
square matrices of size
for linear algebra, in the sense that any two
square matrices of size  may be multiplied with
may be multiplied with
 operations in their coefficient ring. Basically
one may perform Gaussian elimination on Macaulay matrices: for instance,
under
operations in their coefficient ring. Basically
one may perform Gaussian elimination on Macaulay matrices: for instance,
under  operations in ,
where
operations in ,
where  is the Macaulay bound; see [4],
or [8, chapter 26] for a proof from scratch, for instance.
is the Macaulay bound; see [4],
or [8, chapter 26] for a proof from scratch, for instance.
At present time it is not known how to exploit the structure of Macaulay
matrices to perform Gaussian elimination in time quadratic in or even in  .
One contribution to this problem, due to Canny, Kaltofen, and Yagati [14], relies on sparse polynomial interpolation and the
Wiedemann solver. Further important results based on structured linear
algebra have been established by Mourrain, Pan, and Ruatta [56]:
they proved that the number of roots and of real roots can be computed
with
.
One contribution to this problem, due to Canny, Kaltofen, and Yagati [14], relies on sparse polynomial interpolation and the
Wiedemann solver. Further important results based on structured linear
algebra have been established by Mourrain, Pan, and Ruatta [56]:
they proved that the number of roots and of real roots can be computed
with  floating point operations, and that all the
floating point operations, and that all the
 (real) roots in a given box up to the error
(real) roots in a given box up to the error  can be computed with
can be computed with  floating
point operations, where
floating
point operations, where  and
and  depend linearly on
depend linearly on  as well as on the
conditioning of the system. Yet another important advance here is
Faugère's F5 algorithm, which suppresses useless rows in Macaulay
matrices. However, its worst case complexity
as well as on the
conditioning of the system. Yet another important advance here is
Faugère's F5 algorithm, which suppresses useless rows in Macaulay
matrices. However, its worst case complexity  remains essentially cubic in [3, 4]. Other methods derived or inspired by Macaulay's work have
been developed by Mourrain and Trébuchet [57–59].
remains essentially cubic in [3, 4]. Other methods derived or inspired by Macaulay's work have
been developed by Mourrain and Trébuchet [57–59].
For Gröbner bases of zero dimensional systems, monomial orderings
may be changed quite conveniently by means of linear algebra. This is
known as the FGLM algorithm (named after the initials of its authors,
Faugère, Gianni, Lazard and Mora [20]) and involves
a cost  . Recently,
Faugère, Gaudry, Huot and Renault [19] decreased it
to
. Recently,
Faugère, Gaudry, Huot and Renault [19] decreased it
to  . Nevertheless one must
keep in mind that the best practical values for
are only about
. Nevertheless one must
keep in mind that the best practical values for
are only about  , which is far
from the best known theoretical bound
, which is far
from the best known theoretical bound  ,
due to Le Gall [49].
,
due to Le Gall [49].
Another aspect of the present paper concerns multivariate modular
composition, that is the computation of  where
where
 ,
,  has
degree
has
degree  , and
, and  are in . When
are in . When  , the best known complexity bound
, the best known complexity bound  for any field is due to Brent and
Kung [11]. Their algorithm even yields a sub-quadratic cost
for any field is due to Brent and
Kung [11]. Their algorithm even yields a sub-quadratic cost
 when using fast linear algebra; see [40,
p. 185]. Here the constant
when using fast linear algebra; see [40,
p. 185]. Here the constant  is such that a
is such that a  matrix over may be multiplied
with another
matrix over may be multiplied
with another  rectangular matrix with
rectangular matrix with  operations in .
Huang and Pan proved that
operations in .
Huang and Pan proved that  ;
see [38, Theorem 10.1]. In [35, section 3] we
extended Brent and Kung's result to the multivariate setting. A major
breakthrough for the modular composition problem is due to Kedlaya and
Umans [41, 42], in the case when
;
see [38, Theorem 10.1]. In [35, section 3] we
extended Brent and Kung's result to the multivariate setting. A major
breakthrough for the modular composition problem is due to Kedlaya and
Umans [41, 42], in the case when  is a finite field
is a finite field  and more
generally a finite ring of the form
and more
generally a finite ring of the form  for any
integer
for any
integer  and monic of
degree
and monic of
degree  . For any fixed
rational value
. For any fixed
rational value  , they showed
that
, they showed
that  can be computed modulo
can be computed modulo  in time
in time  whenever the partial degrees of
whenever the partial degrees of  are
are  , and
under the condition
, and
under the condition  ; see [42, Theorem 7.1]. Extensions to compositions modulo triangular
sets can be found in [63].
; see [42, Theorem 7.1]. Extensions to compositions modulo triangular
sets can be found in [63].
The first technical but important contribution of this paper concerns
the refinement of Kedlaya and Umans' complexity result on modular
composition [41, 42]. In fact, in Corollary 3.6 we achieve a sharper complexity bound in terms of the
total degree of ,
that is softly linear in the bit size  of the
coefficients, and that holds without the assumption . We also handle fast evaluations of in a larger algebra of the form
of the
coefficients, and that holds without the assumption . We also handle fast evaluations of in a larger algebra of the form  , where
, where  and
and  is monic in
is monic in  of degree
of degree  : this is a particular case of composition modulo
triangular sets studied in [63], for which we also improve
upon the dependency in the coefficient size. These new results are based
on our recent advances on multivariate multi-point evaluation algorithms
[36]. At a more abstract level, our algorithm applies to
any field over which fast multi-point
multivariate polynomial evaluation exists. We recall that fast
multivariate multi-point evaluation remains an important open problem:
no efficient algorithms are known over a general abstract field and we are not aware of any efficient implementations
of Kedlaya and Umans' method; for some recent progress on special cases,
we refer to [33, 34].
: this is a particular case of composition modulo
triangular sets studied in [63], for which we also improve
upon the dependency in the coefficient size. These new results are based
on our recent advances on multivariate multi-point evaluation algorithms
[36]. At a more abstract level, our algorithm applies to
any field over which fast multi-point
multivariate polynomial evaluation exists. We recall that fast
multivariate multi-point evaluation remains an important open problem:
no efficient algorithms are known over a general abstract field and we are not aware of any efficient implementations
of Kedlaya and Umans' method; for some recent progress on special cases,
we refer to [33, 34].
Our main contributions concern the complexity of polynomial system
solving. We first prove a Las Vegas type probabilistic bit complexity
bound  over the finite field
over the finite field  , for the dense representation of input
polynomials, and where is any fixed rational
value: see Corollary 5.5. Whenever
, for the dense representation of input
polynomials, and where is any fixed rational
value: see Corollary 5.5. Whenever  , this bound is arbitrarily close to quadratic in
the number of the roots
, this bound is arbitrarily close to quadratic in
the number of the roots  of the system. This
improves upon previously known bounds. For example, the complexity bound
of the system. This
improves upon previously known bounds. For example, the complexity bound
 whenever
whenever  . With input
polynomials given in dense representation, the quantity
is of the order
. With input
polynomials given in dense representation, the quantity
is of the order  . If all the
remain bounded and if
tends to infinity, then we have
. If all the
remain bounded and if
tends to infinity, then we have
Consequently, the expected complexity of the Kronecker solver becomes
 , in terms of the number of
arithmetic operations in .
However, if the are no longer bounded, then
, in terms of the number of
arithmetic operations in .
However, if the are no longer bounded, then  may grow with
may grow with  and the worst
case complexity of the solver becomes
and the worst
case complexity of the solver becomes  .
.
Our next main result concerns the case .
We assume that have integer coefficients of bit
size  , and we achieve
expected time
, and we achieve
expected time  . Whenever
, this time turns out to be
nearly linear in the bit size of the output: see the precise bound in
Theorem 6.11. This complexity bound admits major
consequences for symbolic real solving, especially for algorithms based
on the Kronecker solver; see for instance [2] and
references therein. Once a Kronecker parametrization is known, it is
also possible to appeal to univariate numerical solvers to deduce
complex or real approximations of the roots of the system; see for
instance the book [55].
. Whenever
, this time turns out to be
nearly linear in the bit size of the output: see the precise bound in
Theorem 6.11. This complexity bound admits major
consequences for symbolic real solving, especially for algorithms based
on the Kronecker solver; see for instance [2] and
references therein. Once a Kronecker parametrization is known, it is
also possible to appeal to univariate numerical solvers to deduce
complex or real approximations of the roots of the system; see for
instance the book [55].
Let us briefly describe the structure of this paper. Section 2 is devoted to prerequisites about the complexity model and fast multi-point polynomial evaluation. The next section 3 deals with various particular cases of multivariate modular composition involved in the Kronecker solver. Section 4 concerns the algebraic data structures needed by the solver, along with general position and some of the randomness aspects. The solver is itself recalled in section 5, that ends with our main result over the finite fields. Our main complexity bound over the rational numbers is stated in the final section 6.
It may be helpful to notice that the probability analysis of our algorithms contains two main stages. On the one hand, we need to put the system in general position and prepare the main data structures. This part is handled in section 4. On the other hand, for the sake of efficiency, some subalgorithms of the Kronecker solver involve additional random parameters that must be taken outside certain proper closed subvarieties (see Propositions 5.2 and 5.3), or integer parameters that must be coprime with a certain set of bad primes (see Lemma 6.7). The probability of picking suitable random parameters of this kind will be analyzed separately.
Throughout this paper, we will be working in the Turing machine model [61] with sufficiently many tapes (seven tapes are usually sufficient in order to implement basic routines on polynomials, series, and matrices in a natural way). The Kronecker algorithm is randomized, so it also requires a special instruction to generate a random symbol in one cell within constant time.
In some cases, algebraic structures have a natural bit size (e.g.
modular integers, finite fields); in other cases the size is variable
(e.g. arrays, polynomials). In both cases elements are represented on
tapes as sequences of symbols, followed by a specific termination symbol
” ”. The reader
must keep in mind that heads of the machine can just move one cell left
or right at each time step. Algorithms must take care of using data in
the most contiguous way as possible, and loop counters cannot be used
for free.
”. The reader
must keep in mind that heads of the machine can just move one cell left
or right at each time step. Algorithms must take care of using data in
the most contiguous way as possible, and loop counters cannot be used
for free.
The rest of the section gathers standard data types and elementary operations needed in the next sections. We freely use well known complexity bounds on polynomials and matrices from [21]; details about Turing machine implementations of these algorithms can be found in [65].
We use binary representation for integers. A modular integer in  is represented by its natural preimage in
is represented by its natural preimage in  . Integers can be added in linear
time and multiplied in softly linear time
. Integers can be added in linear
time and multiplied in softly linear time  ;
see [30] and historical references therein. Integer
divisions and extended gcds in bit size
;
see [30] and historical references therein. Integer
divisions and extended gcds in bit size  also
take softly linear time [64]. We will also use truncated
-adic integers, for which we
refer the interested reader to [6] for practical
algorithms.
also
take softly linear time [64]. We will also use truncated
-adic integers, for which we
refer the interested reader to [6] for practical
algorithms.
One dimensional arrays are sequences of elements terminated by
“”. For example
the vector  is stored as
is stored as  .
.
For bidimensional arrays we use column-major representation. This means
that an array  of size
of size  ( rows and
( rows and  columns), is
stored as the vector of its columns, i.e.
columns), is
stored as the vector of its columns, i.e.  . Such arrays are allowed to contain elements
of different types and sizes. For example the matrix
. Such arrays are allowed to contain elements
of different types and sizes. For example the matrix  over
over  is stored as
is stored as  .
In the Turing machine model, we recall that the transposition of a
bidimensional array can be achieved in softly linear time:
.
In the Turing machine model, we recall that the transposition of a
bidimensional array can be achieved in softly linear time:
 be an
be an  matrix. Let
matrix. Let  denote the size of
denote the size of  for all
for all  , and define
, and define  . Then
. Then  can be
transposed in time
can be
transposed in time  .
.
For univariate polynomials we use dense representation, which means that
a polynomial of degree is stored as the vector
of its  coefficients from degrees
coefficients from degrees  to . Additions
and subtractions take linear time in .
Multiplying two polynomials over finite fields may be achieved in softly
linear time [15, 29, 31].
to . Additions
and subtractions take linear time in .
Multiplying two polynomials over finite fields may be achieved in softly
linear time [15, 29, 31].
In the present paper we consider finite rings of the form  with
with  and
and  monic of degree . Elements of
are stored as their natural preimage in
monic of degree . Elements of
are stored as their natural preimage in  with coefficients in .
Additions and subtractions in take linear time,
products take time
with coefficients in .
Additions and subtractions in take linear time,
products take time  ; see for
instance [21, part II].
; see for
instance [21, part II].
be as above and let  be polynomials in
be polynomials in  . For any
sequence of points
. For any
sequence of points  in
in  we may compute
we may compute  in time
in time  .
.
 be a Galois ring, let
be elements in such that
be a Galois ring, let
be elements in such that  is invertible modulo
is invertible modulo  for all
for all  , and let
, and let  be vectors
in
be vectors
in  . We may compute the
unique polynomials in
. We may compute the
unique polynomials in  such that
such that  for
for  and
and  in time
in time  .
.
For a polynomial  we use the recursive dense
representation, by regarding as an element
of
we use the recursive dense
representation, by regarding as an element
of  . In particular, admits the same representation as its expansion
. In particular, admits the same representation as its expansion  as a univariate polynomial in
as a univariate polynomial in  . In our algorithms, the number of variables is not part of the representation of , so it must be supplied as a separate
parameter.
. In our algorithms, the number of variables is not part of the representation of , so it must be supplied as a separate
parameter.
The support  of
is defined as the set of monomials with non-zero coefficients and we
write
of
is defined as the set of monomials with non-zero coefficients and we
write  for its cardinality. Assuming that, apart
from the mandatory trailing “#” symbol, the representations
of coefficients in do not involve other
“” symbols (this
can always be achieved through suitable renamings
for its cardinality. Assuming that, apart
from the mandatory trailing “#” symbol, the representations
of coefficients in do not involve other
“” symbols (this
can always be achieved through suitable renamings  ), we denote the number of “” symbols involved in the representation
of by
), we denote the number of “” symbols involved in the representation
of by  .
We notice that
.
We notice that  . For the
remainder of this subsection, we assume that the size of elements in
is bounded by a constant
. For the
remainder of this subsection, we assume that the size of elements in
is bounded by a constant  .
.
Example  of degree
of degree  is represented by
is represented by  .
The bivariate polynomial
.
The bivariate polynomial  is represented by
is represented by  .
.
be of partial degree  in
in
 for
for  .
Then
.
Then  , where
, where  .
.
be a non-zero polynomial of total degree  . Then
. Then  , where
, where  .
.
 of a non-zero polynomial
can be computed in time
of a non-zero polynomial
can be computed in time  , where
, where  .
.
 of a polynomial
can be computed in time
of a polynomial
can be computed in time  ,
with the convention that
,
with the convention that  .
.
be as
above. Any partial derivative of of total
degree can be computed in time  , where
, where  .
.
Proof. In order to compute the partial derivative in
, we run over all the
coefficients of  in time
in time  by Lemma 2.6.
by Lemma 2.6.
If we are interested in the derivative in with
 , then we reinterpret as an element of
, then we reinterpret as an element of  and its
derivative requires time .
and its
derivative requires time .
be as
above, let be of total degree , and let  .
Then
.
Then  may be computed in time , where .
may be computed in time , where .
Proof. We use Horner's method to evaluate univariate
polynomials over at  in
softly linear time. In total, the machine runs over the entire
representation of and the time spent in
arithmetic operations is at most
in
softly linear time. In total, the machine runs over the entire
representation of and the time spent in
arithmetic operations is at most  .
.
be as above, let  , and let be elements in
. Then
, and let be elements in
. Then  can be computed in time
can be computed in time

where  is the cardinality of the support of
in the variables
is the cardinality of the support of
in the variables  .
.
At several places we will use the following bound on the cardinality of
the support of a polynomial in variables and
total degree  :
:
 |
(2.1) |
For the sake of efficiency, a homogeneous polynomial in the variables  has a dedicated
representation made of
has a dedicated
representation made of  and
and  . In this way, can be
recovered as
. In this way, can be
recovered as  .
.
The problem called multivariate multi-point evaluation over an
effective ring is the following: given and points in  , compute
, compute  .
The first following statement concerns the cost of the naive evaluation
algorithm in terms of the total degree of .
.
The first following statement concerns the cost of the naive evaluation
algorithm in terms of the total degree of .
with  monic of
degree
monic of
degree  be as above, let
be of total degree . Then
we may evaluate at a point
be as above, let
be of total degree . Then
we may evaluate at a point  in time
in time  .
.
In terms of the partial degrees of ,
we will need the following better complexity bounds that refine previous
work by Kedlaya and Umans [41, 42]. The first
theorem takes partial degrees into account, while the second one is in
terms of the total degree.
 be a fixed rational value. Let with monic of degree , let be
of partial degree
be a fixed rational value. Let with monic of degree , let be
of partial degree  in
for , and let be a sequence of points in .
Then we may compute
in
for , and let be a sequence of points in .
Then we may compute  in time
in time

be a fixed rational value. Let with monic of degree , let be
of total degree , and let
be a sequence of points in . Then we may compute
in time

The Kronecker solver needs to perform a linear change of variables of
matrix  into the input homogeneous polynomials.
Let be such a polynomial in
into the input homogeneous polynomials.
Let be such a polynomial in  of total degree , and let
of total degree , and let
 be a
be a  matrix over
matrix over  . We need to compute
. We need to compute

A natural idea is to interpolate  from its values
at
from its values
at  , where
, where  is a subset of of cardinality . Such an interpolation is known to be
computable in time
is a subset of of cardinality . Such an interpolation is known to be
computable in time  ; see
Lemma A.8 of the appendix. On the other hand the values of
at
; see
Lemma A.8 of the appendix. On the other hand the values of
at  may be obtained in
time
may be obtained in
time  by [36, Proposition 5.7], for
any fixed rational value .
However, this approach suffers from two drawbacks: it takes neither the
homogeneity of nor the structure of into account. At the end of Appendix A, we
show the following sharper complexity result:
by [36, Proposition 5.7], for
any fixed rational value .
However, this approach suffers from two drawbacks: it takes neither the
homogeneity of nor the structure of into account. At the end of Appendix A, we
show the following sharper complexity result:
 be homogeneous of
degree
be homogeneous of
degree  , and let
, and let  be an matrix over . If
be an matrix over . If  and if a
LU-decomposition of is given, then we may
compute
and if a
LU-decomposition of is given, then we may
compute  in time
in time  .
.
This section is devoted to multivariate modular composition, that is the
evaluation of a multivariate polynomial in  at a
point in
at a
point in  , where
, where  with
with  monic and
monic and  . As recalled in the introduction, no fast
algorithm is known for this task over a general ring or field . For the Kronecker solver
presented in this paper, the following particular instances of are needed:
. As recalled in the introduction, no fast
algorithm is known for this task over a general ring or field . For the Kronecker solver
presented in this paper, the following particular instances of are needed:  and
and  , along with tangent numbers over theses rings.
In this section, we design fast algorithms for these cases, on the basis
of Kedlaya and Umans' ideas, and new variants from [36].
, along with tangent numbers over theses rings.
In this section, we design fast algorithms for these cases, on the basis
of Kedlaya and Umans' ideas, and new variants from [36].
If  , then
is the finite field , whereas
, then
is the finite field , whereas
 corresponds to the ring
of the -adic integers
truncated to precision
corresponds to the ring
of the -adic integers
truncated to precision  .
Until the end of the section we set
.
Until the end of the section we set
 |
(3.1) |
and

where  is a monic polynomial of degree
is a monic polynomial of degree  in .
in .
Let  represent a cost function for the
multi-point evaluation of -variate
polynomials over with partial degrees
represent a cost function for the
multi-point evaluation of -variate
polynomials over with partial degrees  , total degree , and for
, total degree , and for  evaluation
points. The following algorithm reduces modular composition to
multi-point evaluation.
evaluation
points. The following algorithm reduces modular composition to
multi-point evaluation.
Algorithm
Write

for the canonical preimage of  in
in  , where
, where  and
and  belong to
belong to  and have partial degrees
and have partial degrees  in
in  and
and  in . In a similar manner write
in . In a similar manner write

for the preimage of in  .
.
Build points  whose reductions modulo
are pairwise distinct.
whose reductions modulo
are pairwise distinct.
For  and for
and for  , compute
, compute

For compute  and
and
 .
.
For and for , compute

Interpolate the polynomials  and
and  in ,
of partial degrees
in ,
of partial degrees  in
and
in
and  in ,
and such that
in ,
and such that  and
and  for all and .
for all and .
Return  reduced modulo
reduced modulo  .
.
Proof. First we verify that

Therefore, for all and
we obtain
Since  has partial degrees
in
has partial degrees
in  and in
and in  , we deduce
, we deduce

whence the correctness of the algorithm.
The rewriting in step 1 takes linear time. The construction of the
points in step 2 costs  . In
step 3 we appeal to Lemma 2.2 in order to obtain
. In
step 3 we appeal to Lemma 2.2 in order to obtain

in time  , and then to obtain
, and then to obtain

for in time  .
Notice that the required data reorganizations can be done in softly
linear time thanks to Lemma 2.1.
.
Notice that the required data reorganizations can be done in softly
linear time thanks to Lemma 2.1.
The cost of step 4 is provided by Lemma 2.11,

and simplifies to  by
by
The derivations in step 5 incur  by Lemma 2.9. Taking into account data reorganizations via
Lemma 2.1, the total cost of step 5 is
by Lemma 2.9. Taking into account data reorganizations via
Lemma 2.1, the total cost of step 5 is

In step 6, the interpolations amount to  by Lemma
2.3. Finally step 7 takes additional time .
by Lemma
2.3. Finally step 7 takes additional time .
Our main complexity bound for modular composition is presented in the next theorem, under the condition that sufficiently many evaluation points are at our disposal. For convenience we recall the following lemma.
be a fixed rational value, assume
that and that
 |
(3.2) |
Let be of total degree
and let  be in ,
with
be in ,
with  monic in of
degree
monic in of
degree  . Then
. Then  can be computed in time
can be computed in time

Proof. Let  be such that
be such that

First we examine the case  .
Lemma 3.2 and the fact that the function
.
Lemma 3.2 and the fact that the function

is nondecreasing yield

so we have  . By adapting
Lemma 2.12 to
. By adapting
Lemma 2.12 to  ,
the cost of the naive modular evaluation is
,
the cost of the naive modular evaluation is  , since .
, since .
From now we assume that  holds. We set
holds. We set  . If is
bounded then so is
. If is
bounded then so is  and the above adaptation of
Lemma 2.12 may again be used to achieve a naive evaluation
cost in . Consequently, we
may further assume that is sufficiently large to
satisfy
and the above adaptation of
Lemma 2.12 may again be used to achieve a naive evaluation
cost in . Consequently, we
may further assume that is sufficiently large to
satisfy
 |
(3.3) |
We perform the multivariate Kronecker segmentation of
into  which has
which has  variables
and partial degrees
variables
and partial degrees  as follows. We let
as follows. We let

and introduce the Kronecker substitution map

We set  and
and  .
Observe that we have
.
Observe that we have  and
and  . From
. From

and

we deduce that

Still by allowing to be sufficiently large we
may further assume that
 |
(3.4) |
On the one hand, by [36, Proposition 5.1] and takes
time

On the other hand, for we compute

by binary powering, in time .
We may now compute as

Since

the condition
 |
|||
 |
 |
||
|
 |
||
 |
|||
 |
 |
||
 |
(using |
||
|
 |
for a suitable constant  . If
. If
 , then this bound further
simplifies to
, then this bound further
simplifies to

Otherwise we have  which implies that
which implies that  . In this case, the condition
in time
. In this case, the condition
in time

which simplifies to  thanks to
thanks to  .
.
Overall we have proved a complexity bound  .
Taking into account that
.
Taking into account that  ,
from
,
from  , which concludes the proof.
, which concludes the proof.
In order to generalize Theorem 3.3 to small residue fields,
namely whenever inequality
 be a Galois ring, and let
be a Galois ring, and let  be an integer that is coprime with . Then we may compute a monic irreducible
polynomial
be an integer that is coprime with . Then we may compute a monic irreducible
polynomial  of degree
in time
of degree
in time  with any fixed arbitrarily low
probability of failure, or in expected time
with a Las Vegas algorithm. Then we may build the Galois ring
with any fixed arbitrarily low
probability of failure, or in expected time
with a Las Vegas algorithm. Then we may build the Galois ring  as
as  ,
such that the following isomorphism holds:
,
such that the following isomorphism holds:

for some polynomials  and
and  in
in  . The polynomials
. The polynomials  , and
can be computed in time
, and
can be computed in time  . Each application of
. Each application of  and
and
 takes time
takes time  .
.
Proof. The polynomial can be
obtained by using Ben-Or's randomized algorithm [21,
Theorem 14.42]. Since and
are coprime, a natural candidate for  is the
composed product of and (usually written
is the
composed product of and (usually written  ),
),
 |
(3.5) |
It is well known that is irreducible of degree
 . Let
. Let  , that can be computed in time
, that can be computed in time  . We construct as the
monic part of the resultant
. We construct as the
monic part of the resultant  in
and we write
in
and we write  for the corresponding subresultant
of degree
for the corresponding subresultant
of degree  in .
For subresultants over Galois rings, we need to compute the necessary
minors of the Sylvester matrix by means of Berkowitz' algorithm [5]. In this manner ,
, and
in .
For subresultants over Galois rings, we need to compute the necessary
minors of the Sylvester matrix by means of Berkowitz' algorithm [5]. In this manner ,
, and  can be obtained in time .
can be obtained in time .
It is well known that is invertible modulo , so we compute  and
and  in time .
in time .
Let us consider an element  represented by
represented by  , and
, and

where  . Equivalently, we have
. Equivalently, we have

which corresponds to the usual Chinese remaindering formula associated
to the factorization .
We observe that  for all roots
for all roots  of . Consequently, for all
roots
of . Consequently, for all
roots  of with
of with  , we have
, we have  . It follows that actually
represents
. It follows that actually
represents  . It can be
computed in time .
. It can be
computed in time .
In the other direction, given a preimage  of
of
 , we obtain
, we obtain  as
as  , in time .
, in time .
Remark in specific cases; see [9,
28, 51]. For simplicity we have preferred to
restrict to general well known algorithms, because the complexity bound
of Lemma 3.4 is to be used only when
is rather small.
The following corollary aims at completing Theorem 3.3 for small residue fields. It will not be used in the sequel because the extension of the residue field will instead be handled at the top level of the Kronecker solver.
be a fixed rational
value, let be as in . Let be of total degree and let
be in ,
with monic in of
degree . Then can be computed using a probabilistic Las Vegas
algorithm in expected time

Proof. Notice that the total degree of may be obtained in time by Lemmas
2.6, 2.8 and inequality

We first compute the smallest integer  such that
such that

that is

and we set

so is coprime to and

We next apply Lemma 3.4, from which we borrow the notation:
 of degree is obtained in
expected time
of degree is obtained in
expected time  ; the
computation of , , and requires time
; the
computation of , , and requires time
 .
.
With this construction in hand we set

and

and we proceed as follows for the modular composition problem:
We cast into  in time
in time
 ;
;
We cast into  in time
;
in time
;
We cast into  in time
in time
 ;
;
By Theorem 3.3, we can evaluate
in in time
We cast into  in time
in time
 .
.
Adding up, we obtain the claimed complexity bound—up to replacing
 by
by  from the outset.
from the outset.
Consider a polynomial system over an effective
field , which satisfies the
regularity assumptions
Under our regularity assumptions, and letting , the coordinate ring  has
dimension
has
dimension  and degree by
the Bézout theorem. In particular the system
admits distinct solutions in , which are all regular. After applying a
generic affine change of coordinates, the Kronecker solver first solves
the system
and degree by
the Bézout theorem. In particular the system
admits distinct solutions in , which are all regular. After applying a
generic affine change of coordinates, the Kronecker solver first solves
the system  then
then  …,
and so on until . We first
study how to perform this change of variables. Next we explain how
positive dimensional solution sets of the intermediate systems
…,
and so on until . We first
study how to perform this change of variables. Next we explain how
positive dimensional solution sets of the intermediate systems  are represented.
are represented.
An homogeneous ideal  of
of  is said to be in Noether position when
is said to be in Noether position when  and
and  is an integral ring extension of
is an integral ring extension of  , where
, where  . Let
. Let  be the column vector
with entries . If
be the column vector
with entries . If  is an invertible matrix over , then we write
is an invertible matrix over , then we write

If is generated by a proper regular sequence
, then we say that a matrix
puts the intermediate ideals  in simultaneous Noether position if is
in Noether position for all .
Let us now examine the probability that this happens for an upper
triangular matrix with ones on the diagonal and
random entries above the diagonal.
in simultaneous Noether position if is
in Noether position for all .
Let us now examine the probability that this happens for an upper
triangular matrix with ones on the diagonal and
random entries above the diagonal.
satisfy  of
of  of cardinality
of cardinality  , consider the matrix
, consider the matrix
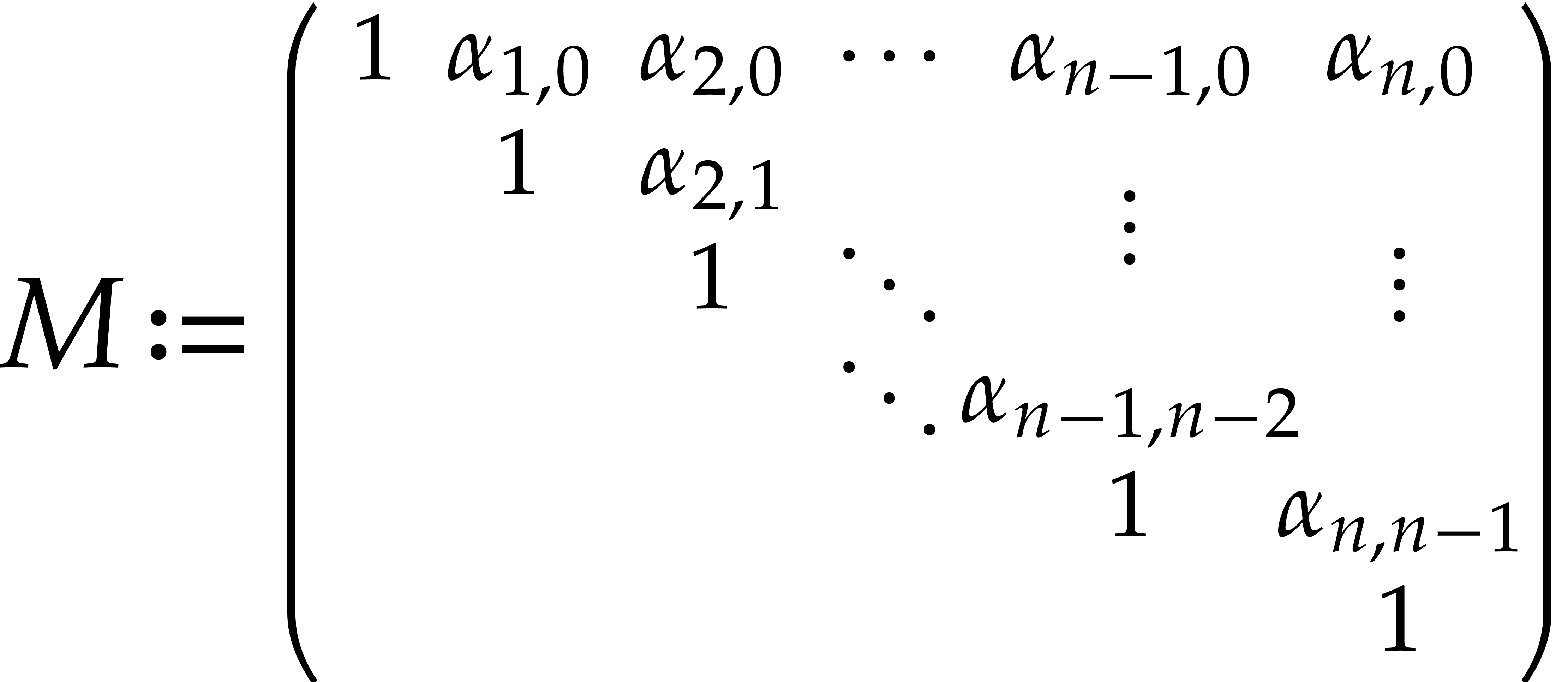
where the  are taken at random in . Then the probability that
are taken at random in . Then the probability that  puts
puts  into simultaneous
Noether position is at least
into simultaneous
Noether position is at least  .
.
Proof. We use the incremental method described in
the proof of [18, Theorem 1.9] as follows (for historical
references, we also refer to [18]). The values  are taken such that the coefficient of
are taken such that the coefficient of  in
in  is non-zero. For such values the ideal
is non-zero. For such values the ideal  is in Noether position.
is in Noether position.
Then we consider the determinant  of the
multiplication endomorphism by
of the
multiplication endomorphism by  in
in  : it belongs to
: it belongs to  and has
degree
and has
degree  . The values
. The values  such that the coefficient of
such that the coefficient of  in
in
 is non-zero put
is non-zero put  into
Noether position.
into
Noether position.
By induction we consider the determinant  of the
multiplication endomorphism by
of the
multiplication endomorphism by  in
in  : it belongs to
: it belongs to  and has
degree
and has
degree  . The values
. The values  such that the coefficient of
such that the coefficient of  in
in
 is non-zero put
is non-zero put  into
Noether position. By taking into account the fact that , the Schwartz–Zippel lemma [66,
69] leads to a probability of success at least
into
Noether position. By taking into account the fact that , the Schwartz–Zippel lemma [66,
69] leads to a probability of success at least

Let be an absolutely radical ideal of
 such that the coordinate ring
such that the coordinate ring  is zero dimensional—here we consider the affine case when is not necessarily homogeneous. A polynomial
is zero dimensional—here we consider the affine case when is not necessarily homogeneous. A polynomial  is said to be a primitive element for
is said to be a primitive element for  if the projections of its powers generate as a -vector
space. Let
if the projections of its powers generate as a -vector
space. Let  represent the degree of (i.e. its dimension as a -vector space).
represent the degree of (i.e. its dimension as a -vector space).
of , the
probability that a random vector  induces a
primitive element
induces a
primitive element  of
of  is
is  .
.
Proof. The minimal polynomial  of
of  in actually belongs
to
in actually belongs
to  when the
when the  are regarded
as parameters, and the total degree in the is
are regarded
as parameters, and the total degree in the is
 ; see for instance [18,
Corollary 3.4]. The points
; see for instance [18,
Corollary 3.4]. The points  to be avoided are the
zeros of the discriminant of
to be avoided are the
zeros of the discriminant of  ,
seen as a polynomial of total degree
,
seen as a polynomial of total degree  in
in  . We conclude by the aforementioned
Schwartz–Zippel lemma.
. We conclude by the aforementioned
Schwartz–Zippel lemma.
For a primitive element  there exist unique
polynomials
there exist unique
polynomials  such that
such that  ,
,  is monic and separable,
is monic and separable,
 , and
, and

The polynomials  are called the
parametrization of by . Equivalently, we may define
are called the
parametrization of by . Equivalently, we may define  for , whence
for , whence

These polynomials  are called the Kronecker
parametrization of by ; such a parametrization is uniquely determined
by .
are called the Kronecker
parametrization of by ; such a parametrization is uniquely determined
by .
satisfy  are simultaneously in Noether position for . Given a finite subset of
, the probability that a
vector
are simultaneously in Noether position for . Given a finite subset of
, the probability that a
vector  induces a primitive element common to all
induces a primitive element common to all  for is
for is  .
.
Proof. Each  has dimension
has dimension
 as a
as a  -vector
space [18, section 2.4 and the relationship to the
geometric definition of the degree of an algebraic variety in Corollary
3.10]. By the previous lemma and the fact that
-vector
space [18, section 2.4 and the relationship to the
geometric definition of the degree of an algebraic variety in Corollary
3.10]. By the previous lemma and the fact that  , the probability that is
primitive for all
, the probability that is
primitive for all  is at least
is at least

Let satisfy

for . Thanks to Noether
positions, the system has all its roots in the
affine space. More generally given a point  all
the roots of
all
the roots of  are in the affine space. A point
is called a lifting point if is absolutely radical.
are in the affine space. A point
is called a lifting point if is absolutely radical.
of , the
probability that a vector  is a simultaneous
lifting point for
is a simultaneous
lifting point for  is
is  .
.
Proof. Without loss of generality we may assume that
is algebraically closed, so we may consider a
primitive element that is common to all , thanks to Lemma 4.3.
The minimal polynomial of
in is homogeneous in  of
degree , and is monic and
separable in . Any point
of
degree , and is monic and
separable in . Any point  such that the specialization of
at
such that the specialization of
at  is separable ensures that
is absolutely radical; see for instance [18, Proposition
3.6]. The probability of picking such a point at random in
is separable ensures that
is absolutely radical; see for instance [18, Proposition
3.6]. The probability of picking such a point at random in  is at least
is at least  by the
Schwartz–Zippel lemma. The probability that
satisfies the requested property is thus at least
by the
Schwartz–Zippel lemma. The probability that
satisfies the requested property is thus at least

again by using .
Assume that we are given a polynomial system
that satisfies :
satisfy be a
finite subset of  . If we
take
. If we
take  in
in  at random, as
well as
at random, as
well as  in ,
and if we let
in ,
and if we let
then  after replacing by
after replacing by  .
.
Proof. We first pick up a matrix
at random as in Lemma 4.1 in order to get simultaneous
Noether positions. Then comes the choice of the lifting point, for which
we use the strategy presented in the proof of Lemma 4.4.
At the end of the resolution, unless the execution has failed, we expect
to obtain an invertible  matrix
over and polynomials
such that is separable of degree , the
matrix
over and polynomials
such that is separable of degree , the  have degree
have degree  , and
, and

On the other hand, being absolutely radical, its
roots are all regular, is separable, and the
value of the Jacobian matrix of in at  is invertible modulo ; see for instance [18,
section 4.2].
is invertible modulo ; see for instance [18,
section 4.2].
One natural question at the end of a probabilistic resolution process is
to determine whether the computed solution set is correct or not. In the
case of sufficiently generic systems, namely satisfying  and regular solutions have been
found. This idea is formalized in the following proposition, which turns
a probabilistic resolution algorithm into a Las Vegas one.
and regular solutions have been
found. This idea is formalized in the following proposition, which turns
a probabilistic resolution algorithm into a Las Vegas one.
in , an
invertible matrix , a linear form ,
and polynomials in  that satisfy the following conditions:
that satisfy the following conditions:
is separable of degree  , the have degree
, the have degree
 ,
,
 ,
,
 for all ,
for all ,
the Jacobian matrix in of
is invertible at  modulo .
modulo .
Then,  is in Noether
position, and form a parametrization of
is in Noether
position, and form a parametrization of  by .
by .
Let be a fixed rational value, and assume
that and if

then the above conditions can be checked in time  .
.
Proof. The assumptions ensure that the system  admits distinct isolated
regular solutions in the affine subspace defined by
admits distinct isolated
regular solutions in the affine subspace defined by  . By Bézout's theorem, this system has
therefore no solution at infinity, namely in the hyperplane defined by
. By Bézout's theorem, this system has
therefore no solution at infinity, namely in the hyperplane defined by
 .
.
For , let  denote the variety of zeros of .
Let us first show that for which
denote the variety of zeros of .
Let us first show that for which  and
and  . In other words
. In other words  would have a (non-empty) equidimensional component
would have a (non-empty) equidimensional component  of dimension
of dimension  and a possibly empty component
and a possibly empty component  of dimension
of dimension  .
Heintz' version of the Bézout theorem [32, Theorem
1] would imply that
.
Heintz' version of the Bézout theorem [32, Theorem
1] would imply that

whence  . Therefore the number
of isolated roots of would be
. Therefore the number
of isolated roots of would be

which contradicts the fact that admits distinct isolated regular solutions.
Let  be in
be in  .
We consider a non-zero homogeneous polynomial
.
We consider a non-zero homogeneous polynomial  in
in
 . We write
. We write  into
into  with
with  primitive as a
polynomial of
primitive as a
polynomial of  and
and  a
monomial in
a
monomial in  . In particular
is monic in and vanishes at all the points of
. In particular
is monic in and vanishes at all the points of  , so it belongs to
, so it belongs to  .
This shows that the class of in
.
This shows that the class of in  is integral over
is integral over  when seen as an element of
. We deduce that is in Noether position; for instance by using [18,
Theorem 1.12].
when seen as an element of
. We deduce that is in Noether position; for instance by using [18,
Theorem 1.12].
Now let us show that R is satisfied. Consider an
irreducible component of
for some index
is satisfied. Consider an
irreducible component of
for some index  and then a point
and then a point  in
in  , which is non-empty in
the projective setting. This point is a solution
of , and as such, the value
of the Jacobian matrix of at
has full rank by hypothesis. Therefore, the Jacobian matrix of
, which is non-empty in
the projective setting. This point is a solution
of , and as such, the value
of the Jacobian matrix of at
has full rank by hypothesis. Therefore, the Jacobian matrix of  has full rank over a Zariski dense subvariety of . It follows that the primary
component associated to is necessarily prime. On
the other hand, R
has full rank over a Zariski dense subvariety of . It follows that the primary
component associated to is necessarily prime. On
the other hand, R implies that
is unmixed by [53, chapter 7, section 17]; in other words,
has no embedded primary ideal. Consequently is absolutely radical.
implies that
is unmixed by [53, chapter 7, section 17]; in other words,
has no embedded primary ideal. Consequently is absolutely radical.
Assume now that , and let us
examine complexities. Testing the separability of
boils down to computing its gcd with  ,
which takes time
,
which takes time  . We compute
in time
. We compute
in time  by Proposition
2.15. Then we compute the Jacobian matrix
by Proposition
2.15. Then we compute the Jacobian matrix  in of in time by Lemma 2.9. The evaluations of all the
in of in time by Lemma 2.9. The evaluations of all the  and of at
and of at  in
in  can be done in time
by means of Theorem 3.3—recall that these homogeneous
polynomials to be evaluated are already represented by their
specialization at . Finally
the determinant of the latter value of is
obtained without division thanks to Berkowitz' algorithm [5]
in time
can be done in time
by means of Theorem 3.3—recall that these homogeneous
polynomials to be evaluated are already represented by their
specialization at . Finally
the determinant of the latter value of is
obtained without division thanks to Berkowitz' algorithm [5]
in time  . Testing the
invertibility of this determinant simply requires additional time .
. Testing the
invertibility of this determinant simply requires additional time .
Let be an effective field and let
be homogeneous polynomials in . Throughout this section, we assume that
conditions  , we assume that a
parametrization of the ideal
, we assume that a
parametrization of the ideal

by a primitive element  is given, so that
is given, so that

We will build primitive elements for all intermediate ideals from a
unique tuple  . In order to
obtain a similar parametrization for
. In order to
obtain a similar parametrization for  ,
we apply the two following steps.
,
we apply the two following steps.
The parametrization of  is lifted into a
parametrization of
is lifted into a
parametrization of

of the form

where  is a monic polynomial of degree in
is a monic polynomial of degree in  ,
and the
,
and the  are in
are in  . It turns out that
. It turns out that  actually belong to
actually belong to  and have total degrees
and have total degrees
 ; see for instance [18, Corollary 3.4]. We will compute them by a variant of
the Newton–Hensel lifting strategy over
; see for instance [18, Corollary 3.4]. We will compute them by a variant of
the Newton–Hensel lifting strategy over  .
.
Geometrically speaking  represents the
affine curve
represents the
affine curve  . The
intersection of this curve with the hypersurface
. The
intersection of this curve with the hypersurface  corresponds to
corresponds to  . The
minimal polynomial of
. The
minimal polynomial of  modulo will be computed as a resultant, and the rest of the
parametrization of is completed by means
of a suitable deformation technique. We define
modulo will be computed as a resultant, and the rest of the
parametrization of is completed by means
of a suitable deformation technique. We define  to be such that this parametrization is of the form
to be such that this parametrization is of the form

The lifting step essentially relies on a multivariate variant of the
Hensel lemma (or, equivalently, on a multivariate power series analogue
of Newton's method). The Jacobian matrix of in
 is written
is written
The identity matrix of size  is written
is written  .
.
Algorithm
Initialize  ,
,  ,
,  ,…,
,…,  .
.
Initialize  with the inverse of
with the inverse of  modulo .
modulo .
While  do the following:
do the following:
update 
and  over
over  ;
;
set  ;
;
compute 
over ;
compute  ;
;
update  computed over ;
computed over ;
for  from
from  to
,
to
,
update  computed over .
computed over .
For from to
, compute  over
over  .
.
Return truncated to order  and then regarded in .
and then regarded in .
be a fixed rational value. If
and if
then it takes time  .
.
Proof. This algorithm directly comes from [27, section 4]. We do not repeat the correctness proof but focus on the complexity analysis in the Turing model for the dense representation of polynomials.
The partial evaluations of at  are achieved in time by Lemma 2.10
and and their total degree. All the partial
derivatives needed for the Jacobian matrix can be obtained in time by Lemma 2.9.
are achieved in time by Lemma 2.10
and and their total degree. All the partial
derivatives needed for the Jacobian matrix can be obtained in time by Lemma 2.9.
In step 2, we compute in time

by Theorem 3.3. Then the inversion of
is performed by Berkowitz' algorithm in time  .
.
In step 3 we regard  and the entries of
and the entries of  as polynomials in
as polynomials in  :
their evaluations at
:
their evaluations at  take time
take time  by Theorem 3.3. The remaining computations in steps 3 until
5 take time
by Theorem 3.3. The remaining computations in steps 3 until
5 take time  .
.
For the intersection step we follow the method designed in [27,
section 6]. We first compute a deformation of the parametrization of
by the primitive element

where the  are new variables satisfying
are new variables satisfying  for all
for all  . Let
. Let
 and let
and let  be a shorthand
for
be a shorthand
for  . The extension
. The extension  of to
of to  is
parametrized by
is
parametrized by  as follows
as follows

where  is monic in of
degree , and the
is monic in of
degree , and the  have degree
have degree  in , for
in , for  .
Of course,
.
Of course,  respectively coincide with modulo
respectively coincide with modulo  . In
addition we know that the total degrees of in
. In
addition we know that the total degrees of in
 and is ; see [18, section 3].
and is ; see [18, section 3].
Algorithm
Compute  .
.
Compute  .
.
For from to do the following:
compute  ;
;
compute  ;
;
compute  .
.
Return  truncated to
truncated to  and regarded in
and regarded in  .
.
 values of
values of
 in ,
Algorithm 5.2 is correct. If , then it takes time .
in ,
Algorithm 5.2 is correct. If , then it takes time .
Proof. This algorithm corresponds to [27,
Algorithm 8]. Its correctness is explained in [27, section
6.4]. We adapt the complexity analysis to our context. In steps 2 and
3.a the inverse of  modulo
modulo  is only required modulo
is only required modulo  . If
we were performing this modular inversion over
. If
we were performing this modular inversion over  then we would have to handle rational functions of degrees growing with
then we would have to handle rational functions of degrees growing with
 . In order to avoid this
coefficient swell we use truncated power series instead of rational
functions. In fact, we compute the inverse of
modulo for specialized
to , then we use classical
Hensel lifting to recover
. In order to avoid this
coefficient swell we use truncated power series instead of rational
functions. In fact, we compute the inverse of
modulo for specialized
to , then we use classical
Hensel lifting to recover  .
This method works fine whenever the resultant of
and does not vanish at . This resultant has degree
in .
.
This method works fine whenever the resultant of
and does not vanish at . This resultant has degree
in .
Algorithm 5.2 needs to shift by
 in the input and by in
the output, which can be done in time using a
divide and conquer algorithm; see for instance [7, Lemma
7]. Then
in the input and by in
the output, which can be done in time using a
divide and conquer algorithm; see for instance [7, Lemma
7]. Then  is obtained in time . The rest of the algorithm performs polynomial
products of cost .
is obtained in time . The rest of the algorithm performs polynomial
products of cost .
If  is a polynomial in of
total degree in and
, and assuming
is a polynomial in of
total degree in and
, and assuming  , then we write
, then we write

for the polynomial in  obtained after replacing
by
obtained after replacing
by  .
This substitution can be performed efficiently as follows:
.
This substitution can be performed efficiently as follows:
Compute  with a softly linear number of
operations in ;
with a softly linear number of
operations in ;
Compute  . This
substitution is applied to each homogeneous component of
. This
substitution is applied to each homogeneous component of  seen in
seen in  .
In fact if
.
In fact if  is the homogeneous component of
degree then we are led to compute
is the homogeneous component of
degree then we are led to compute  , which basically reduces to
computing
, which basically reduces to
computing  , and that
corresponds to a univariate polynomial shift. Such a shift is known
to take softly linear time, as mentioned above.
, and that
corresponds to a univariate polynomial shift. Such a shift is known
to take softly linear time, as mentioned above.
If then this substitution in  takes time . We are now ready
to complete the intersection step.
takes time . We are now ready
to complete the intersection step.
Algorithm
Compute  .
.
Compute  and
and  .
.
For from to compute:
 ;
;
 .
.
Let  .
.
Compute  with
with  in
in
 .
.
Return  truncated modulo
truncated modulo  and seen as polynomials in
and seen as polynomials in  .
.
be a finite subset
of . If we take  in
in  and then
in at random, then Algorithm 5.3
works correctly as specified with probability
and then
in at random, then Algorithm 5.3
works correctly as specified with probability  . Let be a fixed rational
value, and assume that
. Let be a fixed rational
value, and assume that  . If
, and if
. If
, and if
then Algorithm 5.3 takes time  .
.
Proof. The algorithm is borrowed from [27, Algorithm 7]. Again we only focus on the complexity and probability analyses in our context.
First we need to compute  along with the
corresponding Bézout relation that yields
along with the
corresponding Bézout relation that yields  . We wish to apply a fast subresultant algorithm,
namely either the one of [21, chapter 11] or the one of [51]. For this purpose, we need to ensure the following
properties:
. We wish to apply a fast subresultant algorithm,
namely either the one of [21, chapter 11] or the one of [51]. For this purpose, we need to ensure the following
properties:
the leading coefficient (in degree )
of  is non-zero modulo ,
is non-zero modulo ,
the leading coefficient, in degree  ,
of
,
of  is non-zero modulo ,
is non-zero modulo ,
the non-zero subresultant coefficients from degree
to  are non-zero modulo .
are non-zero modulo .
In fact, these coefficients are the only quantities that need to be inverted during the execution of the aforementioned fast subresultant algorithms.
We claim that these properties are met for sufficiently generic values
of the . In order to prove
and quantify this claim, we introduce

where the  are new independent variables, and set
are new independent variables, and set
 . The extension
. The extension  of to
of to  is
parametrized by
is
parametrized by  as follows
as follows

where
 actually belong to
actually belong to  ,
,
 is monic, separable, and of degree in ,
is monic, separable, and of degree in ,
 have degree
have degree  in ,
in ,
have total degree in
and ,
have total degree in
 .
.
For the proofs of these facts we refer the reader to [18,
section 3]. It follows that are the respective
specializations of at  . We further introduce
. We further introduce

By the specialization property, the subresultants of  and
and  , seen as polynomials of
respective degrees
, seen as polynomials of
respective degrees  and
and  in , are the specializations
of those of
in , are the specializations
of those of  and
and  at
at  . Such a subresultant coefficient
of and is a specific
minor of the Sylvester matrix of and , of size at most
. Such a subresultant coefficient
of and is a specific
minor of the Sylvester matrix of and , of size at most  . Therefore such a subresultant coefficient is
a (non-reduced) rational function with denominator
. Therefore such a subresultant coefficient is
a (non-reduced) rational function with denominator  and numerator in
and numerator in  of total degree
of total degree  in
in  .
Consequently the product of all these non-zero numerators yields a
non-zero polynomial
.
Consequently the product of all these non-zero numerators yields a
non-zero polynomial  of total degree
of total degree

such that  implies that the
implies that the  non-zero subresultant coefficients of and are invertible; in particular the resultant is
invertible and so are the leading coefficients of
and .
non-zero subresultant coefficients of and are invertible; in particular the resultant is
invertible and so are the leading coefficients of
and .
The fast computation of  raises the same issue,
and requires the same kind of probability analysis. We thus introduce
raises the same issue,
and requires the same kind of probability analysis. We thus introduce

which belongs to  , has degree
, has degree
 in ,
in ,
and total degree in . In this way
in ,
in ,
and total degree in . In this way

is the specialization of  at .
at .
A subresultant coefficient of  and , seen as polynomials of respective degrees
and , seen as polynomials of respective degrees
 and ,
is a (non-reduced) rational function with denominator
and ,
is a (non-reduced) rational function with denominator  and numerator in of total degree
and numerator in of total degree  in .
Consequently there exists a non-zero polynomial
in .
Consequently there exists a non-zero polynomial  of total degree
of total degree

such that  implies that all the non-zero
subresultant coefficients of
implies that all the non-zero
subresultant coefficients of  and and the leading coefficients of
and are invertible.
and and the leading coefficients of
and are invertible.
As in the proof of Lemma 4.2, there exists a non-zero
polynomial  of total degree
of total degree  such that
such that  implies that
implies that  is a primitive element for .
This ensures the correctness of the output.
is a primitive element for .
This ensures the correctness of the output.
Now assume that  . This
happens with probability
. This
happens with probability

whenever is taken at random in .
The subresultant coefficients of and have degree  in , so except for
in , so except for  values
of , we can compute modulo in time
values
of , we can compute modulo in time  , by means of the fast subresultant algorithm.
A subresultant coefficient of and has degree
, by means of the fast subresultant algorithm.
A subresultant coefficient of and has degree  in , so except for
in , so except for  values
of ,
values
of ,  can be computed by means of the fast subresultant algorithm modulo in time .
Consequently a suitable value for is found at
random in with probability of success
can be computed by means of the fast subresultant algorithm modulo in time .
Consequently a suitable value for is found at
random in with probability of success
All the substitutions  take
time according to the above discussion. All the shifts by and in
totalize time
take
time according to the above discussion. All the shifts by and in
totalize time  .
.
The steps 3.b take time  in total. In step 4 we
first specialize the variables
in total. In step 4 we
first specialize the variables  to
to  in time , after
which the rest of the evaluation of
in time , after
which the rest of the evaluation of

is decomposed into  evaluations in
evaluations in  for
for  . More
precisely, for the evaluation in
. More
precisely, for the evaluation in  we ignore the
variables
we ignore the
variables  for
for  and we may
thus appeal to Theorem 3.3 in order to achieve time
and we may
thus appeal to Theorem 3.3 in order to achieve time

Putting together the propositions of this and the previous sections, we obtain the following complexity bound.
be a fixed rational value, let
and let be homogeneous
polynomials in of total degrees  such that:
such that:
Then an invertible matrix ,
a primitive element and a Kronecker
parametrization of  can be computed in time
can be computed in time
 , with a probability of
failure that is bounded by
, with a probability of
failure that is bounded by  .
.
Proof. This result is a consequence of the Kronecker
solver that was recalled at the beginning of this section. First we pick
up an invertible matrix of size
with entries at random in as described in Lemma
4.5, in order to ensure that after replacing by conditions

Computing takes time  by
Proposition 2.15.
by
Proposition 2.15.
On the other hand the probability that are
suitable for all the intersection steps is at least

by Proposition 5.3. The probability that a random value of
is suitable for all stages of the solver is at
least

Overall the probability of failure is bounded by  . Notice that the constant
. Notice that the constant  is not intended to be optimal. The total complexity follows by combining
Propositions 5.1, 5.2 and 5.3.
is not intended to be optimal. The total complexity follows by combining
Propositions 5.1, 5.2 and 5.3.
be a fixed rational
value, let and let be
homogeneous polynomials in of total degrees
such that
Then the Kronecker algorithm computes an integer  , the finite field
, the finite field  , the images of into
, the images of into  , an invertible matrix with entries in ,
a primitive element
, an invertible matrix with entries in ,
a primitive element  and a Kronecker
parametrization of
and a Kronecker
parametrization of  over
in time with any arbitrarily small fixed
probability of failure, or in expected time
with a Las Vegas algorithm.
over
in time with any arbitrarily small fixed
probability of failure, or in expected time
with a Las Vegas algorithm.
Proof. The case

is already handled in Theorem 5.4, and corresponds to  . So we focus on the opposite case
. So we focus on the opposite case
 , for which
, for which  . We compute the first integer
such that
. We compute the first integer
such that
that is
Then we set

so is coprime to and we
have  . Now we appeal to Lemma
3.4: we construct in time
. Now we appeal to Lemma
3.4: we construct in time  with probability of failure
with probability of failure  ;
then the casts between and
can be achieved in time
;
then the casts between and
can be achieved in time  .
.
With this construction at hand we proceed as follows:
We cast into in time
 ;
;
We call the Kronecker solver over .
In view of Theorem 5.4, the resolution over takes time with a probability
of failure  .
.
Using Proposition 4.6, the correctness of the result can be
verified in time as well. We are thus able to
reach any arbitrarily small fixed probability of failure by repeating
the resolution sufficiently many times. Altogether, this leads to a Las
Vegas algorithm that satisfies the claimed expected complexity
bound—of course, needs to be replaced by
from the outset to conclude the proof.
Remark are , then it is far more efficient to
compute:
a permutation  of
of  ,
,
 , linear forms
, linear forms  ,
,
homogeneous polynomials  of total degrees
of total degrees
 ,
,
such that  for
for  and
and  for
for  . In
this way we are reduced to solve a “smaller” system with all
degrees
. In
this way we are reduced to solve a “smaller” system with all
degrees  . This simplification
in the input system can be achieved in time
. This simplification
in the input system can be achieved in time  by
means of Proposition 2.15. We leave out the details for the
sake of conciseness.
by
means of Proposition 2.15. We leave out the details for the
sake of conciseness.
From now we turn to solving polynomial systems
with coefficients in  , still
under assumptions
, still
under assumptions  , and we appeal to the algorithm designed in [27, section 4.6]: we first perform the resolution modulo a
suitable prime number , and
then lift the parametrization of the solution set over the -adic numbers by means of Newton–Hensel
lifting. Roughly speaking, once the bit size exceeds twice the maximum
bit size of the integers of the Kronecker parametrization over
, and we appeal to the algorithm designed in [27, section 4.6]: we first perform the resolution modulo a
suitable prime number , and
then lift the parametrization of the solution set over the -adic numbers by means of Newton–Hensel
lifting. Roughly speaking, once the bit size exceeds twice the maximum
bit size of the integers of the Kronecker parametrization over  , then this parametrization can be
reconstructed from its -adic
expansion.
, then this parametrization can be
reconstructed from its -adic
expansion.
In order to formalize this approach, we first need to estimate the bit
size of the Kronecker parametrizations in terms of the input size. Then
we design a probabilistic algorithm that generates suitable values for
with high probability.
For a scalar, a vector, a matrix, or a polynomial
over  we write
we write  for the
maximal norm of its entries or coefficients. Then the height of , written
for the
maximal norm of its entries or coefficients. Then the height of , written  , is defined as
, is defined as

Until the end of the text we set
 -adic
Hensel lifting
-adic
Hensel lifting
In section 5.1 we have described an algorithm for lifting
power series in a Kronecker parametrization. In the following paragraph
we adapt the method to lift -adic
integers instead. The algorithm originates from [27,
section 4.6]. The Jacobian matrix of in is still written
Algorithm
Initialize  , ,
, ,  ,…, .
,…, .
Initialize with the inverse of  modulo .
modulo .
While  do the following:
do the following:
update  and
and  , over
, over  ;
;
set  ;
;
compute  over ;
over ;
compute  over ;
over ;
replace computed over ;
for from  to
,
to
,
replace computed over .
For from to
, compute over .
Return  .
.
be a fixed rational value. If

then Algorithm 6.1 takes time  , where
, where  .
.
Proof. This algorithm directly comes from [27, section 4.6]. We do not repeat the proof of the correctness but focus directly on its bit complexity for the dense representation of input polynomials.
Before all we may compute the partial derivatives of the in time  by Lemma 2.9
to any precision
by Lemma 2.9
to any precision  . In step 2,
we compute in time
. In step 2,
we compute in time

by Theorem 3.3. Then the inversion of
modulo is performed by Berkowitz' algorithm in
time  .
.
In step 3 the evaluations of and  at
at  at a given precision
at a given precision  take time
take time  ,
again in view of Theorem 3.3. Since we keep doubling until we reach the precision , the total cost is bounded by
,
again in view of Theorem 3.3. Since we keep doubling until we reach the precision , the total cost is bounded by  . The rest of the computations in steps 3 and 4
take time
. The rest of the computations in steps 3 and 4
take time  .
.
Let  be a zero dimensional subvariety of . “The” Chow
form of is the polynomial
be a zero dimensional subvariety of . “The” Chow
form of is the polynomial  that satisfies
that satisfies

where the are taken in . The Chow form is defined up to a scalar factor in
, and is homogeneous of total
degree  .
.
From now we assume that is the variety of  , where is
an invertible integer matrix such that
, where is
an invertible integer matrix such that  is in Noether position. In this setting,
is included in the affine subspace
is in Noether position. In this setting,
is included in the affine subspace  defined by
, and we have
defined by
, and we have  . We then define the normalized Chow
form
. We then define the normalized Chow
form  of
of  as the
-multiple of
as the
-multiple of  having the coefficient of
having the coefficient of  equal to . The normalized Chow form belongs to
equal to . The normalized Chow form belongs to  .
.
In order to bound bit sizes of Kronecker parametrizations of , we first need to bound the bit
size of the coefficients of .
For this purpose we follow a construction due to Philippon [62],
and introduce
where  denotes the
denotes the  -Mahler
measure of defined as
-Mahler
measure of defined as

where  is the usual Haar measure of mass 1 over
the sphere
is the usual Haar measure of mass 1 over
the sphere

So is to be understood as a real  -dimensional integral.
-dimensional integral.
On the other hand, the usual Mahler measure of
is defined as an -dimensional
complex contour integral

The relationship between these two measures is given in [52, Theorem 4]:

which implies
 |
(6.1) |
Then we appeal to [43, Corollary 2.10, p. 553] which
ensures the existence of a rational number such
that  has all its coefficients in and
has all its coefficients in and
 |
(6.2) |
To relate the Mahler measure to the actual bit size of
we use [43, Lemma 1.1, p. 529]:
 |
(6.3) |
Combining the three latter inequalities leads to
Let be a Kronecker parametrization of by the primitive element taken in
 . It relates to the Chow form
of as follows:
. It relates to the Chow form
of as follows:

Since belongs to  ,
all the coefficients of
,
all the coefficients of  and of
and of  for also belong to ,
and their bit size can be bounded as follows. By
for also belong to ,
and their bit size can be bounded as follows. By  and inequality admits at most
and inequality admits at most  terms,
whence
terms,
whence
where  is a shorthand for
is a shorthand for  . Now we estimate how the coefficients of increase because of the change of variables .
. Now we estimate how the coefficients of increase because of the change of variables .
Proof. The proof is immediate by using  and inequality
and inequality
Proof. This is a well known unconditional variant of Stirling's formula:

be an matrix over  such
that is in Noether position. Then we have
such
that is in Noether position. Then we have

In addition, for a Kronecker parametrization  of
of  , and with as above, then we have
, and with as above, then we have

Proof. From Lemmas 6.2 and 6.3 we obtain

Consequently,

Combining this bound with  , we deduce
, we deduce

Finally we use  to bound
to bound  by
by  , which concludes the
proof.
, which concludes the
proof.
Given an input polynomial system satisfying , we are led
to characterize prime numbers for which the
system admits isolated simple roots when
considered modulo . We will
rely on the a posteriori verification criterion from
Proposition 4.6, in order to ensure that a resolution
modulo can be lifted over the rational numbers.
Proof. The inequality is an equality for  . For
. For  we
have
we
have

whence  by induction on .
by induction on .
be a  matrix over the real numbers, then we have
matrix over the real numbers, then we have  , where
, where  represents
the -th column vector of
.
represents
the -th column vector of
.
be homogeneous polynomials in  which satisfy
which satisfy  such that
such that

and for any that does not divide the sequence satisfies  .
.
Proof. By Lemma 4.5 there exists an
invertible matrix with
integer entries such that  and
is in Noether position. On the other hand by Lemma 4.2
there exists a primitive element for
and
is in Noether position. On the other hand by Lemma 4.2
there exists a primitive element for  with integer coefficients and such that
with integer coefficients and such that  . Let represent the
corresponding Kronecker parametrization, and let
and
. Let represent the
corresponding Kronecker parametrization, and let
and  be as above. Let
be as above. Let  be
a non-zero coefficient in of a term of degree
for ,
let
be
a non-zero coefficient in of a term of degree
for ,
let  be the Jacobian matrix of
with respect to , and
be the Jacobian matrix of
with respect to , and

By construction,  ,
,  and thus are positive integers.
Now if does not divide , then
and thus are positive integers.
Now if does not divide , then  for , and the system admits
isolated regular roots modulo . Consequently satisfy
R, R, and by Proposition 4.6.
for , and the system admits
isolated regular roots modulo . Consequently satisfy
R, R, and by Proposition 4.6.
To conclude the proof it remains to bound .
First, we may further rewrite a bound for the quantity  introduced in Lemma 6.4, by making use of
introduced in Lemma 6.4, by making use of  :
:

By applying Lemma 6.6 on the Sylvester matrix of  and
and  , we obtain
, we obtain

whence
As to , we deduce from Lemma
6.4 that

On the one hand, we have

hence

On the other hand, Lemma 6.5 gives us

From Lemma 6.4 and  ,
it follows that
,
it follows that
Let  denote the group of permutations of . Then we have
denote the group of permutations of . Then we have

Again by Hadamard bound we deduce that

whence
The conclusion follows from adding right-hand sides of  .
.
Remark
for . Let be an invertible
matrix over and let
be a linear form in . Let be a prime number,
and let be polynomials in  such that:
such that:
is monic of degree
and  for ;
for ;
is separable modulo ;
 ;
;
 is a root of
modulo
is a root of
modulo  ;
;
The value of the Jacobian matrix of in
at is invertible
modulo .
Then satisfy  ), is a primitive element for ,
and coincide modulo
with the Kronecker parametrization of over
by .
), is a primitive element for ,
and coincide modulo
with the Kronecker parametrization of over
by .
Proof. By Proposition 4.6, the residues
modulo of form a
Kronecker parametrization of .
We may use Algorithm 6.1 from a theoretical point of view
in order to prove the existence of univariate polynomials  over the -adic
numbers
over the -adic
numbers  , satisfying the
following properties:
, satisfying the
following properties:
is monic of degree
and  for ;
for ;
have nonnegative valuations in and coincide with modulo ;
 ;
;
 is a root of modulo
;
is a root of modulo
;
The value of the Jacobian matrix of in at  is invertible modulo
.
is invertible modulo
.
Consequently, Proposition 4.6 ensures that
is a Kronecker parametrization of over by the primitive element .
By uniqueness, it coincides with the image over
of the Kronecker parametrization of  over by . Using
again Proposition 4.6 with the parametrization over the
rationals concludes the proof.
over by . Using
again Proposition 4.6 with the parametrization over the
rationals concludes the proof.
Now we address the question of obtaining a suitable prime number.
and
such that  , computes a
prime in the range
, computes a
prime in the range  , which does not divide , with probability of success
, which does not divide , with probability of success  , and in time
, and in time  .
.
Proof. This is a consequence of [21,
Theorem 18.10, part (i)]: we just appeal to the deterministic primality
test designed in [1] in order to ensure that is always prime in return. This test works in polynomial
time.
The idea behind the Kronecker solver over is as
follows. For a suitable prime ,
we use the Kronecker algorithm to solve the input system over  . If the algorithm finishes with
success, then we appeal to the a posteriori verification
criterion of Lemma 6.9. If the criterion passes, then we
may lift the Kronecker parametrization over the -adic integers to arbitrary precision by using Algorithm 6.1, and we know that the
-adic parametrization is the
image of the rational one. Consequently, as soon as
is sufficiently large, we can reconstruct the parametrization over .
. If the algorithm finishes with
success, then we appeal to the a posteriori verification
criterion of Lemma 6.9. If the criterion passes, then we
may lift the Kronecker parametrization over the -adic integers to arbitrary precision by using Algorithm 6.1, and we know that the
-adic parametrization is the
image of the rational one. Consequently, as soon as
is sufficiently large, we can reconstruct the parametrization over .
Let us recall that a rational number  ,
with
,
with  and
and  ,
is uniquely determined by its -adic
expansion to precision whenever
,
is uniquely determined by its -adic
expansion to precision whenever  and
and  ; see for instance [68, section 4]. Using the fast Euclidean algorithm from [21, Theorem 5.26] this reconstruction takes
; see for instance [68, section 4]. Using the fast Euclidean algorithm from [21, Theorem 5.26] this reconstruction takes  . The choices of and
the precision needed by the solver are made
precise in the following algorithm. We recall that
. The choices of and
the precision needed by the solver are made
precise in the following algorithm. We recall that  is a fixed positive rational number, thought to be small.
is a fixed positive rational number, thought to be small.
Algorithm
For each from to
, compute the maximum
bit size  of the coefficients of
of the coefficients of  .
.
Compute and a positive integer  such that
such that  .
.
Compute  such that
such that
Compute a prime number at random in  via Lemma 6.10.
via Lemma 6.10.
Call the Kronecker algorithm underlying Theorem 5.4
with the images  of
in
of
in  . If the
resolution fails then go to step 2.
. If the
resolution fails then go to step 2.
Let  be the data returned by the
Kronecker algorithm in step 3. If
be the data returned by the
Kronecker algorithm in step 3. If  ,
or if
,
or if  is not separable, or if
is not separable, or if  , or if one of the
, or if one of the  does not vanish at
does not vanish at  modulo
modulo  , or if the
value of the Jacobian matrix of
, or if the
value of the Jacobian matrix of  in at is not invertible
modulo , then go to
step 2.
in at is not invertible
modulo , then go to
step 2.
Let (resp. )
be the canonical preimage of  (resp. of
(resp. of
 ) with entries in
) with entries in
 . Let be the first integer such that
. Let be the first integer such that

Compute over , and use Algorithm 6.1 to
obtain the Kronecker parametrization by
of over .
By rational reconstruction, compute the unique polynomials in  that coincide with
modulo .
that coincide with
modulo .
Notice that  is whenever
all the have their coefficients in
is whenever
all the have their coefficients in  . Therefore in the following complexity
estimates we shall write
. Therefore in the following complexity
estimates we shall write  in order to make
complexity bounds valid in this particular case.
in order to make
complexity bounds valid in this particular case.
Proof. By Lemma 6.10 the prime determined in step 2 does not divide the integer defined in Lemma 6.7 with probability
. In other words, the
sequence satisfy properties . Thanks to  , Theorem 5.4 ensures that the
Kronecker solver modulo succeeds with
probability . It follows that
the expected number of times that the algorithm repeats steps 2 to 4 is
bounded.
, Theorem 5.4 ensures that the
Kronecker solver modulo succeeds with
probability . It follows that
the expected number of times that the algorithm repeats steps 2 to 4 is
bounded.
Once the algorithm passes step 4, Lemma 6.9 ensures that
the parametrization modulo may be lifted to any
arbitrary precision, and that the parametrization over
may be recovered whenever the precision is sufficiently large. According
to the preceding discussion on rational reconstruction, we need that
with defined in Lemma 6.4; it
satisfies

with  and
and  being
being  . This concludes the proof of
correctness.
. This concludes the proof of
correctness.
The computation of needs time  by Lemmas 2.6 and 2.8. Then , and
can be computed in time
by Lemmas 2.6 and 2.8. Then , and
can be computed in time  ,
which is negligible since
,
which is negligible since

The cost of step 2 is by Lemma 6.10,
which is again negligible.
By Theorem 5.4 step 3 takes time

since  . Proposition 4.6
then provides us with the cost
. Proposition 4.6
then provides us with the cost

for step 4. Computing over
in step 5 takes  by Proposition 2.15.
The cost of the -adic Hensel
lifting is given in Proposition 6.1:
by Proposition 2.15.
The cost of the -adic Hensel
lifting is given in Proposition 6.1:

where  . We verify that
. We verify that

Step 6 requires additional time  .
.
The version of the Kronecker solver summarized in Algorithm 6.2
can be optimized by using ideas previously developed for the case of
input polynomials given by straight-line programs [27]; see
implementation details in the
A first optimization consists in minimizing the height of the
parametrization over the rationals. For this purpose it is worth finding
a matrix and a primitive element of small
height. This search may be achieved efficiently modulo , and we refer the reader to [50]
for the description of the underlying algorithms.
A second optimization concerns the early termination of the lifting
stage over the -adic
integers. In fact one may try to perform rational reconstruction before
the bound on the precision is actually reached. If all the
reconstructions succeed, then it suffices to verify that the Kronecker
parametrization actually describes the solution set. A probabilistic
method to do this consists in evaluating the equations at the
parametrization modulo an independent random prime number  with a bit size similar to the one of . This verification may also be done
deterministically over the rationals, but at a higher cost.
with a bit size similar to the one of . This verification may also be done
deterministically over the rationals, but at a higher cost.
For an input system in variables of degrees
 , the quantity
, the quantity  is of the order
is of the order  .
Therefore with
.
Therefore with  , Algorithm 6.2 involves primes of bit size close
to 52 bits. In fact, the bounds used in the design of Algorithm 6.2
have been simplified and overestimated for the sake of the presentation.
Sharper bounds should be considered in practice, in order to ensure that
fits into 32 bits for small and moderate
systems, and 64 bits for larger ones.
, Algorithm 6.2 involves primes of bit size close
to 52 bits. In fact, the bounds used in the design of Algorithm 6.2
have been simplified and overestimated for the sake of the presentation.
Sharper bounds should be considered in practice, in order to ensure that
fits into 32 bits for small and moderate
systems, and 64 bits for larger ones.
Let us finally mention that the present bound for the bit size of the Kronecker parametrization over the rationals turns out to be essentially sharp for generic systems, according to [54, Theorem 3.1]. Consequently the complexity reached within Theorem 6.11 is nearly linear in the “expected” size of the output, from the asymptotic point of view. This fact is illustrated by the following example.
Example
where and  .
Let
.
Let  be a root of
be a root of
and set

so that  is clearly a zero of
is clearly a zero of  . For
. For  ,
we observe that
,
we observe that
It follows that is also a zero of  . The value of the Jacobian matrix of in at is
. The value of the Jacobian matrix of in at is
By expanding  with respect to the last column, we
obtain
with respect to the last column, we
obtain
Consequently is invertible. From

Proposition 4.6 thus ensures that  satisfies R and R,
that it is in Noether position, and that it is parametrized by the
primitive element
satisfies R and R,
that it is in Noether position, and that it is parametrized by the
primitive element  , as
follows:
, as
follows:

The Kronecker solver was already known to be competitive both in theory and practice for polynomial systems represented by straight-line programs; see for instance timings in [2, 27]. Under suitable genericity assumptions and for suitable ground fields, we have shown in this paper that this solver also leads to improved probabilistic asymptotic complexity bounds for the dense representation of input polynomials.
Our main results concern finite fields and rational numbers, but our methods can in principle be extended to any ground field over which fast multivariate multi-modular composition is available. Unfortunately, it is still a major open problem to design an algorithm for modular composition over arbitrary ground fields.
Another major problem concerns the practical efficiency of algorithms for modular composition. This holds in particular for the recent fast algorithms for finite fields designed by Kedlaya and Umans [42], and revisited in [36]; we refer the reader to the concluding section of [36] for a quantitative discussion. Consequently we do not expect our Theorem 3.3 to be of practical use, and we cannot claim our new main complexity bounds for polynomial system solving to be relevant in practice.
Nevertheless, it is important to point out that Theorem 3.3 uses modular composition as a blackbox. Whenever faster algorithms for this task do become available, they can directly be used in our algorithms. As one possible research direction, it is worthwhile to investigate the replacement of generic modular compositions by specific ones, such as those studied in [33, 34] and which feature more promising performances.
The Kronecker solver admits different extensions for when genericity
assumptions
Yet another important question for systems over the rational numbers concerns the complexity of finding numerical approximations of the roots. In generic cases we have proved in Theorem 6.11 how to compute Kronecker representations of solution sets in quasi-optimal time. This implies that numerical roots may also be computed in quasi-linear time but whenever the requested precision is “sufficiently large”, by means of fast univariate polynomial solvers. It would be interesting to quantify the latter “sufficiently large”, and to compare to the state of the art of numerical polynomial solvers.
This appendix is devoted to subjecting a multivariate polynomial to a linear change of variables. More precisely,
given and an matrix  over a commutative ring ,
then we wish to compute
over a commutative ring ,
then we wish to compute

The fast algorithms that we propose below do not seem to be available in the literature. They are suitable for any coefficient ring with sufficiently many elements, and they are also well suited for homogeneous polynomials.
In this subsection we focus on the algebraic model (computation trees
for instance), we let be an effective
commutative ring, and  is a cost function such
that two polynomials in
is a cost function such
that two polynomials in  may be multiplied with
cost
may be multiplied with
cost  . The evaluation of a
multivariate polynomial at points in a block of points , where is a finite
subset of , is usually
achieved by the successive use of fast univariate evaluations, as
recalled in the following lemma.
. The evaluation of a
multivariate polynomial at points in a block of points , where is a finite
subset of , is usually
achieved by the successive use of fast univariate evaluations, as
recalled in the following lemma.
 , let be of partial degree in for ,
and let be a subset of
of cardinality
, let be of partial degree in for ,
and let be a subset of
of cardinality  . Then, all
the values of at can
be computed with
. Then, all
the values of at can
be computed with  arithmetic operations in
.
arithmetic operations in
.
Proof. We interpret as a
univariate polynomial in ,

We evaluate  at
at  recursively. Then, for each
recursively. Then, for each  ,
we evaluate
,
we evaluate  at all the points of , with a total cost
at all the points of , with a total cost  . Denoting by
. Denoting by  the cost of
the algorithm in terms of operations in ,
we thus obtain
the cost of
the algorithm in terms of operations in ,
we thus obtain

By induction over , it
follows that

which implies the claimed bound.
The next lemma, also well known, concerns the corresponding interpolation problem.
, let  be pairwise distinct points in
such that is invertible whenever , let
be pairwise distinct points in
such that is invertible whenever , let  be a family of
values in for
be a family of
values in for  running
over
running
over  . The unique
polynomial of partial degrees
and such that
. The unique
polynomial of partial degrees
and such that  for all
for all  can be computed with arithmetic operations in
, including inversions.
can be computed with arithmetic operations in
, including inversions.
Proof. Again we interpret as
a univariate polynomial in ,
 |
(A.1) |
For all  we interpolate the values
we interpolate the values  with
with  operations in . We then recursively interpolate
operations in . We then recursively interpolate  and form as in (A.1).
The total cost is obtained as in the proof of the previous lemma.
and form as in (A.1).
The total cost is obtained as in the proof of the previous lemma.
The aim of the following proposition is the fast evaluation of at a set of points of the form  , for any matrix and any
vector .
, for any matrix and any
vector .
,
let be of partial degree
in for ,
let  be a subset of of
cardinality such that
is invertible whenever ,
let be a matrix over
, and let
be a subset of of
cardinality such that
is invertible whenever ,
let be a matrix over
, and let  . Let
. Let  be the column
vector with entries . If an
LU-decomposition of is given, then
be the column
vector with entries . If an
LU-decomposition of is given, then  and
and  can be computed with
can be computed with  arithmetic operations in , including inversions.
arithmetic operations in , including inversions.
Proof. We write  .
We first assume that is upper triangular, and we
partition into
.
We first assume that is upper triangular, and we
partition into
where  and
and  .
We compute
.
We compute

for  using operations in
. For , we then evaluate
using operations in
. For , we then evaluate  at
at  by induction. The base case
by induction. The base case  takes constant time
takes constant time  .
Consequently, for any , the
total number of operations in is , by the same argument as in the proof of Lemma
A.1. We recover
.
Consequently, for any , the
total number of operations in is , by the same argument as in the proof of Lemma
A.1. We recover  with operations in by Lemma A.2.
with operations in by Lemma A.2.
If is lower triangular then we may revert of the
variables in and the columns of
in order to reduce to the upper triangular case. Alternatively, we may
adapt the latter decomposition of the set of points, as follows:
where  and
and  .
So we compute
.
So we compute

and evaluate  at by
induction, for .
at by
induction, for .
Finally if is general, then it suffices to use
the given LU-decomposition, where  is lower
triangular with on the diagonal, and is upper triangular. In fact we have
is lower
triangular with on the diagonal, and is upper triangular. In fact we have  , so we compute
, so we compute  and
then
and
then  and
and  .
.
In the next lemma the same technique is adapted to homogeneous polynomials.
 be homogeneous of degree
be homogeneous of degree  , let be
a matrix over ,
and let
, let be
a matrix over ,
and let  be a subset of
of cardinality
be a subset of
of cardinality  such that
is invertible whenever . If
an LU-decomposition of is given, then can be computed with
such that
is invertible whenever . If
an LU-decomposition of is given, then can be computed with  arithmetic operations in .
arithmetic operations in .
Proof. Assume first that is
lower triangular and let  . We
are led to compose
. We
are led to compose  with
with
by means of Proposition A.3. If is
upper triangular then it suffices to revert the variables in , and the
columns of , in order to
reduce to the lower triangular case. Alternatively, we may set  and compose
and compose  with
with
in order to obtain  . Finally,
for any , it suffices to use
the given LU-decomposition.
. Finally,
for any , it suffices to use
the given LU-decomposition.
be homogeneous of
degree , let be an  matrix over , and let be a subset
of of cardinality such
that is invertible whenever . If an LU-decomposition of
is given, then
matrix over , and let be a subset
of of cardinality such
that is invertible whenever . If an LU-decomposition of
is given, then  can be computed with
can be computed with  arithmetic operations in .
arithmetic operations in .
Proof. The total number of coefficients in is  by inequality
by inequality
 |
(A.2) |
where  is made of the terms of
which are multiple of , then
is made of the terms of
which are multiple of , then
 is made of the terms of
is made of the terms of  which are multiple of
which are multiple of  ,…,
and finally
,…,
and finally  is made of the terms of
is made of the terms of  which are multiple of (that is a
-multiple of a power of ). In this way, we are led to
compute
which are multiple of (that is a
-multiple of a power of ). In this way, we are led to
compute  for
for  ,
with
,
with  of degree
of degree  ;
this requires operations in , by Lemma A.4. Then can be recovered with further
;
this requires operations in , by Lemma A.4. Then can be recovered with further  operations.
operations.
Remark  , for instance in geometric progressions, then
multipoint evaluations and interpolations in one variable and in degree
over cost
, for instance in geometric progressions, then
multipoint evaluations and interpolations in one variable and in degree
over cost  by means of [10], that saves a factor of
by means of [10], that saves a factor of  in the above complexity estimates.
in the above complexity estimates.
For the purpose of the present paper, we need to adapt the results of
the previous subsection to the case when is the
Galois Ring , and in the
context of Turing machines. In the next lemmas we use the lexicographic
order on  , written
, written  , defined by
, defined by

In terms of Turing machines, we need the following variants of Lemmas A.1 and A.2.
,
let  be of partial degree
in for ,
and let be values in . Then, the values
be of partial degree
in for ,
and let be values in . Then, the values  for
running over in the
lexicographic order can be computed in
time
for
running over in the
lexicographic order can be computed in
time

Proof. The proof follows the one of Lemma A.1
while taking data reorganizations into account. More precisely, using
one  matrix transposition, we reorganize the
values of the after the recursive calls into the
sequence of
matrix transposition, we reorganize the
values of the after the recursive calls into the
sequence of

for  running over
running over  in the
lexicographic order . Then,
after the multi-point evaluations of
in the
lexicographic order . Then,
after the multi-point evaluations of  ,
we need to transpose the
,
we need to transpose the  array made of the
values of , in order to
ensure the lexicographic ordering in the output. The cost of these
transpositions is
array made of the
values of , in order to
ensure the lexicographic ordering in the output. The cost of these
transpositions is  by Lemma 2.1,
which is negligible.
by Lemma 2.1,
which is negligible.
and  . Let be pairwise distinct
values in such that is
invertible modulo for all , and let be a family
of values in for
running over in the lexicographic order . The unique polynomial of partial degree in for , and
such that for all in
, can be computed in
time
. Let be pairwise distinct
values in such that is
invertible modulo for all , and let be a family
of values in for
running over in the lexicographic order . The unique polynomial of partial degree in for , and
such that for all in
, can be computed in
time
Proof. The proof follows the one of Lemma A.2,
by doing the data reorganizations in the opposite direction from the one
in the proof of Lemma A.7.
From now, for convenience, we discard the case  . In this way, whenever
. In this way, whenever  , we may use
, we may use  .
.
 and . Let be of partial
degree in for , and let
be a matrix over .
If an LU-decomposition of is given, then can be computed in time
and . Let be of partial
degree in for , and let
be a matrix over .
If an LU-decomposition of is given, then can be computed in time  .
.
Proof. We first generate a subset  of
of  of cardinality in
time
of cardinality in
time  ; this ensures the
invertibility of for . The proof then follows the one of Proposition A.3 while taking data reorganizations into account. When is upper triangular, the computation of
; this ensures the
invertibility of for . The proof then follows the one of Proposition A.3 while taking data reorganizations into account. When is upper triangular, the computation of  requires the multi-point evaluation of
regarded in
requires the multi-point evaluation of
regarded in  : we may simply
appeal to the fast univariate algorithm because it only involves
additions, subtractions and products by elements of
over the ground ring
: we may simply
appeal to the fast univariate algorithm because it only involves
additions, subtractions and products by elements of
over the ground ring  .
Consequently may be obtained in time
.
Consequently may be obtained in time  , by Lemma 2.5. In
addition, the array of values of the must be transposed at the end, in order to guarantee the
lexicographic ordering necessary to interpolate .
, by Lemma 2.5. In
addition, the array of values of the must be transposed at the end, in order to guarantee the
lexicographic ordering necessary to interpolate .
When is lower triangular, the data
reorganization costs essentially the same, except that the computation
of takes time by Lemmas
2.11 and 2.5.
Before achieving the proof of Proposition 2.15, we further need the following lemma in order to change the representation of a homogeneous polynomial.
be a homogeneous polynomial of
degree in ,
represented as before by and , and let  .
Then, for any we can compute
.
Then, for any we can compute  in time .
in time .
Proof. For simplicity the proof is done for  , but it extends in a
coefficientwise manner to any .
A sparse representation of is made of a sequence
of pairs of coefficients and vector exponents. More precisely, if
, but it extends in a
coefficientwise manner to any .
A sparse representation of is made of a sequence
of pairs of coefficients and vector exponents. More precisely, if  then a sparse representation of it is the sequence of
the pairs
then a sparse representation of it is the sequence of
the pairs  , for all the
non-zero coefficients
, for all the
non-zero coefficients  . The
bit size of a vector exponent is
. The
bit size of a vector exponent is  ,
and therefore the bit size of a sparse representation of is
,
and therefore the bit size of a sparse representation of is  by
by
In order to prove the lemma, we first convert , given in dense representation, into a sparse
representation. When  the sparse representation
of
the sparse representation
of  may be obtained in time
may be obtained in time  . Otherwise
. Otherwise  and we
regard in ,
and we
regard in ,

and recursively compute the sparse representation of  for
for  . These representations
may naturally be glued together into a sparse representation of , in time , by adding the exponent of
into each exponent vector. A straightforward induction leads to a total
time for the change of representation of . Then the sparse representation of
may be deduced with additional time by appending the exponent of
needed for homogenization.
. These representations
may naturally be glued together into a sparse representation of , in time , by adding the exponent of
into each exponent vector. A straightforward induction leads to a total
time for the change of representation of . Then the sparse representation of
may be deduced with additional time by appending the exponent of
needed for homogenization.
Second, from the latter sparse representation of
we may simply discard the exponents of and
multiply the coefficients with the corresponding powers of , in order to obtain a sparse representation of
 in time .
in time .
Finally it remains to construct the dense representation of from its sparse representation. To this aim we sort the
sparse representation in increasing lexicographic order on the exponent
vectors in time  . We next
compute the dense representation by induction over . Writing
. We next
compute the dense representation by induction over . Writing

the sparse representations of  are computed by
induction, after removal of the powers of .
The induction ends when , in
which case the conversion to dense representation requires time . In total, the dense
representation of can be computed in time .
are computed by
induction, after removal of the powers of .
The induction ends when , in
which case the conversion to dense representation requires time . In total, the dense
representation of can be computed in time .
Proof of Proposition 2.15. We follow the proofs of Lemma A.4 and Proposition A.5, still while taking into account the cost of data reorganizations.
In the proof of Lemma A.4, the cost of obtaining and is given by Lemma A.10,
that is .
In the proof of Proposition A.5 we first need to compute
the decomposition . The polynomial

is represented by

and  . Consequently
. Consequently  may be easily obtained in time
may be easily obtained in time  . Then the rest of the decomposition
. Then the rest of the decomposition  is obtained from
is obtained from  ,
recursively. The total cost for obtaining all the
,
recursively. The total cost for obtaining all the  is therefore bounded by .
is therefore bounded by .
For any  , any , and any
, any , and any  ,
the computations of
,
the computations of  and of
and of  take time
take time  since their supports have cardinality
by
since their supports have cardinality
by
Finally, from
we obtain the representation of as

using additional time . The
cost of the data reorganizations in the proof of Proposition A.5
is negligible.
M. Agrawal, N. Kayal, and N. Saxena. PRIMES is in P. Ann. Math., pages 781–793, 2004.
B. Bank, M. Giusti, J. Heintz, G. Lecerf, G. Matera, and P. Solernó. Degeneracy loci and polynomial equation solving. Found. Comput. Math., 15(1):159–184, 2015.
M. Bardet. Étude des systèmes algébriques surdéterminés. Applications aux codes correcteurs et à la cryptographie. PhD thesis, Université Pierre et Marie Curie - Paris VI, 2004. https://tel.archives-ouvertes.fr/tel-00449609.
M. Bardet, J.-C. Faugère, and B. Salvy. On the
complexity of the  Gröbner basis
algorithm. J. Symbolic Comput., 70:49–70, 2015.
Gröbner basis
algorithm. J. Symbolic Comput., 70:49–70, 2015.
S. J. Berkowitz. On computing the determinant in small parallel time using a small number of processors. Inform. Process. Lett., 18:147–150, 1984.
J. Berthomieu, J. van der Hoeven, and G. Lecerf. Relaxed algorithms for p-adic numbers. J. Théor. Nombres Bordeaux, 23(3), 2011.
J. Berthomieu, G. Lecerf, and G. Quintin. Polynomial root finding over local rings and application to error correcting codes. Appl. Alg. Eng. Comm. Comp., 24(6):413–443, 2013.
A. Bostan, F. Chyzak, M. Giusti, R. Lebreton, G. Lecerf, B. Salvy, and É Schost. Algorithmes Efficaces en Calcul Formel. Frédéric Chyzak (self-published), Palaiseau, 2017. Electronic version available from https://hal.archives-ouvertes.fr/AECF.
A. Bostan, Ph. Flajolet, B. Salvy, and É. Schost. Fast computation of special resultants. J. Symbolic Comput., 41(1):1–29, 2006.
A. Bostan and É. Schost. Polynomial evaluation and interpolation on special sets of points. J. Complexity, 21(4):420–446, 2005.
R. P. Brent and H. T. Kung. Fast algorithms for manipulating formal power series. J. ACM, 25(4):581–595, 1978.
W. D. Brownawell. Bounds for the degrees in the Nullstellensatz. Annal. of Math., 126(3):577–591, 1987.
P. Bürgisser, M. Clausen, and M. A. Shokrollahi. Algebraic complexity theory, volume 315 of Grundlehren der Mathematischen Wissenschaften. Springer-Verlag, 1997.
J. F. Canny, E. Kaltofen, and L. Yagati. Solving systems of nonlinear polynomial equations faster. In Proceedings of the ACM-SIGSAM 1989 International Symposium on Symbolic and Algebraic Computation, ISSAC '89, pages 121–128, New York, NY, USA, 1989. ACM.
D. G. Cantor and E. Kaltofen. On fast multiplication of polynomials over arbitrary algebras. Acta Infor., 28:693–701, 1991.
J.-M. Couveignes and R. Lercier. Fast construction of irreducible polynomials over finite fields. Israel J. Math., 194(1):77–105, 2013.
C. D'Andrea, A. Ostafe, I. E. Shparlinski, and M. Sombra. Reduction modulo primes of systems of polynomial equations and algebraic dynamical systems. Trans. Amer. Math. Soc., 371(2):1169–1198, 2019.
C. Durvye and G. Lecerf. A concise proof of the Kronecker polynomial system solver from scratch. Expo. Math., 26(2):101–139, 2008.
J.-C. Faugère, P. Gaudry, L. Huot, and G. Renault. Sub-cubic change of ordering for Gröbner basis: A probabilistic approach. In Proceedings of the 39th International Symposium on Symbolic and Algebraic Computation, ISSAC '14, pages 170–177, New York, NY, USA, 2014. ACM.
J.-C. Faugère, P. Gianni, D. Lazard, and T. Mora. Efficient computation of zero-dimensional Gröbner bases by change of ordering. J. Symbolic Comput., 16(4):329–344, 1993.
J. von zur Gathen and J. Gerhard. Modern computer algebra. Cambridge University Press, New York, 3rd edition, 2013.
N. Giménez and G. Matera. On the bit complexity of polynomial system solving. J. Complexity, 51:20–67, 2019.
M. Giusti. Some effectivity problems in polynomial ideal theory. In J. Fitch, editor, EUROSAM 84: International Symposium on Symbolic and Algebraic Computation Cambridge, England, July 9–11, 1984, pages 159–171, Berlin, Heidelberg, 1984. Springer Berlin Heidelberg.
M. Giusti, K. Hägele, J. Heintz, J. L. Montaña, J. E. Morais, and L. M. Pardo. Lower bounds for Diophantine approximations. J. Pure Appl. Algebra, 117/118:277–317, 1997.
M. Giusti, J. Heintz, J. E. Morais, J. Morgenstern, and L. M. Pardo. Straight-line programs in geometric elimination theory. J. Pure Appl. Algebra, 124(1-3):101–146, 1998.
M. Giusti, J. Heintz, J. E. Morais, and L. M. Pardo. When polynomial equation systems can be “solved” fast? In Applied algebra, algebraic algorithms and error-correcting codes (Paris, 1995), volume 948 of Lecture Notes in Comput. Sci., pages 205–231. Springer-Verlag, 1995.
M. Giusti, G. Lecerf, and B. Salvy. A Gröbner free alternative for polynomial system solving. J. complexity, 17(1):154–211, 2001.
B. Grenet, J. van der Hoeven, and G. Lecerf. Deterministic root finding over finite fields using Graeffe transforms. Appl. Alg. Eng. Comm. Comp., 27(3):237–257, 2016.
D. Harvey and J. van der Hoeven. Faster polynomial multiplication over finite fields using cyclotomic coefficient rings. J. Complexity, 54:101404, 2019.
D. Harvey and J. van der Hoeven. Integer
multiplication in time  .
Technical report, HAL, 2019. http://hal.archives-ouvertes.fr/hal-02070778.
.
Technical report, HAL, 2019. http://hal.archives-ouvertes.fr/hal-02070778.
D. Harvey and J. van der Hoeven. Polynomial
multiplication over finite fields in time . Technical report, HAL, 2019. http://hal.archives-ouvertes.fr/hal-02070816.
J. Heintz. Definability and fast quantifier elimination in algebraically closed fields. Theor. Comput. Sci., 24(3):239–277, 1983.
J. van der Hoeven and G. Lecerf. Modular composition via complex roots. Technical report, CNRS & École polytechnique, 2017. http://hal.archives-ouvertes.fr/hal-01455731.
J. van der Hoeven and G. Lecerf. Modular composition via factorization. J. Complexity, 48:36–68, 2018.
J. van der Hoeven and G. Lecerf. Accelerated tower arithmetic. J. Complexity, 55:101402, 2019.
J. van der Hoeven and G. Lecerf. Fast multivariate multi-point evaluation revisited. J. Complexity, 56:101405, 2020.
J. van der Hoeven, G. Lecerf, B. Mourrain, et al. Mathemagix, From 2002. http://www.mathemagix.org.
Xiaohan Huang and V. Y. Pan. Fast rectangular matrix multiplication and applications. J. Complexity, 14(2):257–299, 1998.
G. Jeronimo and J. Sabia. Effective equidimensional decomposition of affine varieties. J. Pure Appl. Algebra, 169(2–3):229–248, 2002.
E. Kaltofen and V. Shoup. Fast polynomial factorization over high algebraic extensions of finite fields. In Proceedings of the 1997 International Symposium on Symbolic and Algebraic Computation, ISSAC '97, pages 184–188, New York, NY, USA, 1997. ACM.
K. S. Kedlaya and C. Umans. Fast modular composition in any characteristic. In FOCS'08: IEEE Conference on Foundations of Computer Science, pages 146–155, Washington, DC, USA, 2008. IEEE Computer Society.
K. S. Kedlaya and C. Umans. Fast polynomial factorization and modular composition. SIAM J. Comput., 40(6):1767–1802, 2011.
T. Krick, L. M. Pardo, and M. Sombra. Sharp estimates for the arithmetic Nullstellensatz. Duke Math. J., 109(3):521–598, 2001.
L. Kronecker. Grundzüge einer arithmetischen Theorie der algebraischen Grössen. J.reine angew. Math., 92:1–122, 1882.
Y. N. Lakshman. On the complexity of computing a Gröbner basis for the radical of a zero dimensional ideal. In Proceedings of the Twenty-second Annual ACM Symposium on Theory of Computing, STOC '90, pages 555–563, New York, NY, USA, 1990. ACM.
Y. N. Lakshman. A single exponential bound on the complexity of computing Gröbner bases of zero dimensional ideals. In T. Mora and C. Traverso, editors, Effective Methods in Algebraic Geometry, pages 227–234, Boston, MA, 1991. Birkhäuser Boston.
Y. N. Lakshman and D. Lazard. On the complexity of zero-dimensional algebraic systems. In T. Mora and C. Traverso, editors, Effective Methods in Algebraic Geometry, pages 217–225, Boston, MA, 1991. Birkhäuser Boston.
D. Lazard. Gröbner bases, Gaussian elimination and resolution of systems of algebraic equations. In J. A. Hulzen, editor, Computer Algebra: EUROCAL'83, European Computer Algebra Conference London, England, March 28–30, 1983 Proceedings, pages 146–156. Springer Berlin Heidelberg, 1983.
F. Le Gall. Powers of tensors and fast matrix multiplication. In K. Nabeshima, editor, ISSAC'14: International Symposium on Symbolic and Algebraic Computation, pages 296–303, New York, NY, USA, 2014. ACM.
G. Lecerf. Computing the equidimensional decomposition of an algebraic closed set by means of lifting fibers. J. Complexity, 19(4):564–596, 2003.
G. Lecerf. On the complexity of the Lickteig–Roy subresultant algorithm. J. Symbolic Comput., 92:243–268, 2019.
P. Lelong. Mesure de Mahler et calcul de constantes
universelles pour les polynomes de
variables. Math. Ann., 299(1):673–695, 1994.
H. Matsumura. Commutative ring theory, volume 8 of Cambridge Studies in Advanced Mathematics. Cambridge university press, 1989.
D. McKinnon. An arithmetic analogue of Bezout's theorem. Compos. Math., 126(2):147–155, 2001.
J. M. McNamee and V. Y. Pan. Numerical Methods for Roots of Polynomials, Part II, volume 16 of Studies in Computational Mathematics. Elsevier, 2013.
B. Mourrain, V. Y. Pan, and O. Ruatta. Accelerated solution of multivariate polynomial systems of equations. SIAM J. Comput., 32(2):435–454, 2003.
B. Mourrain and Ph. Trébuchet. Solving projective complete intersection faster. In Proceedings of the 2000 International Symposium on Symbolic and Algebraic Computation, ISSAC '00, pages 234–241, New York, NY, USA, 2000. ACM.
B. Mourrain and Ph. Trébuchet. Generalized normal forms and polynomial system solving. In Proceedings of the 2005 International Symposium on Symbolic and Algebraic Computation, ISSAC '05, pages 253–260, New York, NY, USA, 2005. ACM.
B. Mourrain and Ph. Trébuchet. Border basis representation of a general quotient algebra. In Proceedings of the 37th International Symposium on Symbolic and Algebraic Computation, ISSAC '12, pages 265–272, New York, NY, USA, 2012. ACM.
A. K. Narayanan. Fast computation of isomorphisms between finite fields using elliptic curves. In L. Budaghyan and F. Rodríguez-Henríquez, editors, Arithmetic of Finite Fields. 7th International Workshop, WAIFI 2018, Bergen, Norway, June 14–16, 2018, Revised Selected Papers, volume 11321 of Lecture Notes in Comput. Sci., pages 74–91. Springer, Cham, 2018.
C. H. Papadimitriou. Computational Complexity. Addison-Wesley, 1994.
P. Philippon. Sur des hauteurs alternatives. I. Math. Ann., 289(1):255–283, 1991.
A. Poteaux and É. Schost. On the complexity of computing with zero-dimensional triangular sets. J. Symbolic Comput., 50:110–138, 2013.
A. Schönhage. Schnelle Berechnung von Kettenbruchentwicklungen. Acta Informatica, 1(2):139–144, 1971.
A. Schönhage, A. F. W. Grotefeld, and E. Vetter. Fast algorithms: A multitape Turing machine implementation. B. I. Wissenschaftsverlag, Mannheim, 1994.
J. T. Schwartz. Fast probabilistic algorithms for verification of polynomial identities. J. ACM, 27(4):701–717, 1980.
V. Shoup. New algorithms for finding irreducible polynomials over finite fields. Math. Comp., 54(189):435–447, 1990.
P. S. Wang. A p-adic algorithm for univariate partial fractions. In Proceedings of the Fourth ACM Symposium on Symbolic and Algebraic Computation, SYMSAC '81, pages 212–217, New York, NY, USA, 1981. ACM.
R. Zippel. Probabilistic algorithms for sparse polynomials. In Proceedings EUROSAM' 79, number 72 in Lect. Notes Comput. Sci., pages 216–226. Springer-Verlag, 1979.
 .
.
 we have
we have

 of
of  is absolutely radical.
is absolutely radical.
 and the parametrization
and the parametrization
 of
of
 of
of
 .
. and
and
 of
of  .
. and the parametrization
and the parametrization
 of
of
 by
by
 .
. of
of  by
by 






 be homogeneous of total degree
be homogeneous of total degree

 .
. we have
we have  .
.







 is in Noether position, a linear form
is in Noether position, a linear form  ,
,