| Effective analytic functions |
|
Dépt. de Mathématiques
(bât. 425)
Université Paris-Sud
91405 Orsay Cedex
France
|
|
Email: vdhoeven@texmacs.org
|
|
|
One approach for computations with special functions in computer
algebra is the systematic use of analytic functions whenever possible.
This naturally leads to problems of how to answer questions about
analytic functions in a fully effective way. Such questions comprise
the determination of the radius of convergence or the evaluation of
the analytic continuation of the function at the endpoint of a broken
like path. In this paper, we propose a first definition for the notion
of an effective analytic function and we show how to effectively solve
several types of differential equations in this context. We will limit
ourselves to functions in one variable.
Keywords: Complex analysis, computer algebra, algorithm,
majorant method.
1Introduction
An important problem in computer algebra is how to compute with special
functions which are more complicated than polynomials. A systematic
approach to this problem is to recognize that most interesting special
functions are analytic, so they are completely determined by their power
series expansions at a point.
Of course, the concept of “special function” is a bit vague.
One may for instance study expressions which are built up from a finite
number of classical special functions, like  ,
,  or
or  . But one may also study larger classes of
“special functions”, such as the solutions to systems of
algebraic differential equations with constant coefficients. Let us
assume that we have fixed a class
. But one may also study larger classes of
“special functions”, such as the solutions to systems of
algebraic differential equations with constant coefficients. Let us
assume that we have fixed a class  of such
special functions or expressions for the sequel of this introduction.
of such
special functions or expressions for the sequel of this introduction.
In order to develop a satisfactory computational theory for the
functions or expressions in ,
one may distinguish the following main subproblems:
The first subproblem is called the zero-test problem and it has been
studied before in several works [Ris75, ?; DL84, ?; DL89, ?; Kho91, ?;
Sha89, ?; Sha93, ?; PG97, ?; SvdH01, ?; vdH02b, ?]. For large classes of
special functions, it turns out that the zero-test problem for power
series can be reduced to the zero-test problem for constants (see also
[vdH01b, ?] for a discussion of this latter problem).
In this paper, we will focus on the second subproblem, while leaving
aside the efficiency considerations and restricting our attention to
functions in one variable. By “safe evaluation” of  at
at  , we mean
that we want an algorithm which computes an approximation
, we mean
that we want an algorithm which computes an approximation  for
for  with
with  for any
for any  . If such an
algorithm exists, then we say that is an
effective complex number. By “any point where the expression may
be defined”, we mean that we do not merely plan to study
. If such an
algorithm exists, then we say that is an
effective complex number. By “any point where the expression may
be defined”, we mean that we do not merely plan to study  near the point where a power series expansion was given,
but that we also want to study all possible analytic continuations of
.
near the point where a power series expansion was given,
but that we also want to study all possible analytic continuations of
.
In other words, the aim of this paper is to develop an “effective
complex analysis” for computations with analytic functions in a
class which we wish to be as large as possible.
Such computations mainly consist of safe evaluations, bound computations
for convergence radii and absolute values of functions on closed disks,
and analytic continuation. Part of the philosophy behind this paper also
occurs in [BB85, ?; CC90, ?], but without the joint emphasis on
effectiveness at all stages and usefulness from the implementation point
of view. In previous papers [vdH99, ?; vdH01a, ?], we have also studied
in detail the fast and safe evaluation of holonomic functions. When
studying solutions to non-linear differential equations, one must
carefully avoid undecidable problems:
Theorem 1[DL89, ?] Given a power series  with rational coefficients, which is the unique solution of an algebraic
differential equation
with rational coefficients, which is the unique solution of an algebraic
differential equation

with rational coefficients and rational initial conditions, one
cannot in general decide whether the radius of convergence  of
of  is
is  or
or
 .
.
What we will show in this paper, is that whenever we know that
an analytic function as in the above theorem may
be continued analytically along an “effective broken line
path”  , then the value
, then the value
 of at the endpoint of
is effective (theorem 11). We will
also show that we may “effectively solve” any monic linear
differential equation, without introducing singularities which were not
already present in the coefficients (theorem 10).
of at the endpoint of
is effective (theorem 11). We will
also show that we may “effectively solve” any monic linear
differential equation, without introducing singularities which were not
already present in the coefficients (theorem 10).
In order to prove these results, we will carefully introduce the concept
of an “effective analytic function” in section 2.
The idea is that such a function is given
locally at the origin and that we require algorithms for
-
Computing coefficients of the power series expansion;
-
Computing a lower bound  for the radius of
convergence;
for the radius of
convergence;
-
Computing an upper bound for  on any closed
disk of radius
on any closed
disk of radius  .
.
-
Analytic continuation.
But we will also require additional conditions, which will
ensure that the computed bounds are good enough from a more global point
of view. In section 3, we will show that all analytic
functions, which are constructed from the effective complex numbers and
the identity function using  and , are effective. In section 4, we
will study the resolution of differential equations.
and , are effective. In section 4, we
will study the resolution of differential equations.
It is convenient to specify the actual algorithms for computations with
effective analytic functions in an object oriented language with
abstract data types (like C++). Effective types
and functions will be indicated through the use of a sans
serif font. We will not detail memory management issues and
assume that the garbage collector takes care of this. The Columbus
program is a concrete implementation of some of the ideas in this paper
[vdH02a, ?], although this program works with double precision instead
of effective complex numbers.
2Effective analytic functions
2.1Effective numbers and power series
A complex number  is said to be
effective, if there exists an algorithm which takes a positive
number
is said to be
effective, if there exists an algorithm which takes a positive
number  on input and which returns an
approximation
on input and which returns an
approximation  for with
for with
 . We will also denote the
approximation by
. We will also denote the
approximation by  . In
practice, we will represent by an abstract data
structure
. In
practice, we will represent by an abstract data
structure  with a method
with a method  which implements the above approximation algorithm. The asymptotic
complexity of an effective complex number
which implements the above approximation algorithm. The asymptotic
complexity of an effective complex number  is the asymptotic complexity of its approximation algorithm.
is the asymptotic complexity of its approximation algorithm.
We have a natural subtype  of effective real
numbers. Recall, however, that there is no algorithm in order to decide
whether an effective complex number is real. In the sequel, we will use
the notations
of effective real
numbers. Recall, however, that there is no algorithm in order to decide
whether an effective complex number is real. In the sequel, we will use
the notations  and
and  .
.
Let  be a weakly effective ring, in the
sense that all elements of can be represented by
explicit data structures and that we have algorithms for the ring
operations
be a weakly effective ring, in the
sense that all elements of can be represented by
explicit data structures and that we have algorithms for the ring
operations  and
and  .
If we also have an effective zero test, then we say that is an effective ring.
.
If we also have an effective zero test, then we say that is an effective ring.
An effective series over is a series
 , such that there exists an
algorithm in order to compute the
, such that there exists an
algorithm in order to compute the  -th
coefficient of . Effective
series over are represented by instances of the
abstract data type
-th
coefficient of . Effective
series over are represented by instances of the
abstract data type  , which
has a method
, which
has a method  , which computes
the truncation
, which computes
the truncation  of at
order as a function of
of at
order as a function of  . The asymptotic complexity of is the asymptotic complexity of this expansion algorithm.
In particular, we have an algorithm to compute the -th coefficient
. The asymptotic complexity of is the asymptotic complexity of this expansion algorithm.
In particular, we have an algorithm to compute the -th coefficient  of an
effective series. A survey of efficient methods to compute with
effective series can be found in [vdH02c, ?].
of an
effective series. A survey of efficient methods to compute with
effective series can be found in [vdH02c, ?].
When is an effective series in  , then we denote by
, then we denote by  the
actual series which is represented by .
If
the
actual series which is represented by .
If  is the germ of analytic function, then we
will denote by
is the germ of analytic function, then we
will denote by  the radius of convergence of and by
the radius of convergence of and by  the maximum of
the maximum of  on the closed disk
on the closed disk  of radius
of radius
 , for each
, for each  .
.
2.2Effective germs
An effective germ of an analytic function
at  is an abstract data structure
is an abstract data structure  which inherits from and with the
following additional methods:
which inherits from and with the
following additional methods:
Remark 2For
the sake of simplicity, we have reused the notations
and  in order to denote the applications of the
methods
in order to denote the applications of the
methods  and
and  to . Clearly, one should carefully
distinguish between resp. and resp. . The
to . Clearly, one should carefully
distinguish between resp. and resp. . The  -th
coefficient of will always be denoted by
-th
coefficient of will always be denoted by  .
.
Given an effective germ , we
may implement a method  ,
which takes an effective complex number with
,
which takes an effective complex number with
 on input, and which computes its effective value
on input, and which computes its effective value
 at .
For this, we have to show how to compute arbitrarily good approximations
for :
at .
For this, we have to show how to compute arbitrarily good approximations
for :
Algorithm 
Step 1 [Compute expansion order]
Let  and
and 
Let  be smallest such that
be smallest such that
Step 2 [Approximate the series expansion]
Compute  Complex
Complex
Return 
The correctness of this algorithm follows from Cauchy's formula:
2.3Effective paths
Any  -tuple
-tuple  of complex numbers determines a unique affine broken line path
or affine path in
of complex numbers determines a unique affine broken line path
or affine path in  ,
which is denoted by
,
which is denoted by  . If
. If
 , then we call
, then we call  a broken line path or a path of
length
a broken line path or a path of
length  . We denote
by
. We denote
by  the space of all paths and by
the space of all paths and by  the space of all affine paths. The trivial path of length
is denoted by
the space of all affine paths. The trivial path of length
is denoted by  .
An affine path
.
An affine path  is said to be effective if
is said to be effective if  . We denote by
. We denote by  the type of all effective affine paths and by
the type of all effective affine paths and by  the type of all effective paths.
the type of all effective paths.
Another notation for the path  is
is  ; the first notation is called the usual
notation; the second one is called the incremental
notation. Let
; the first notation is called the usual
notation; the second one is called the incremental
notation. Let  and
and  be two paths in . Then we
define their concatenation
be two paths in . Then we
define their concatenation  by
by

We also define the reversion  of by
of by

The norm of is defined by

Notice that  and
and  .
.
We say that is a truncation of  if
if  and
and  for
for  . In this case, we write
. In this case, we write
 and
and  ,
so that
,
so that  (however, we do not always have
(however, we do not always have  ). The longest common
truncation of two general paths and always exists and we denote it by
). The longest common
truncation of two general paths and always exists and we denote it by  . If we restrict our attention to paths
. If we restrict our attention to paths  such that
such that  are in a subfield
of with an effective zero-test (like
are in a subfield
of with an effective zero-test (like  ), then
), then  and
and
 are clearly effective.
are clearly effective.
A subdivision of a path  is a path of
the form
is a path of
the form  , where
, where  with
with  for all
for all  . If is a subdivision
of , then we write
. If is a subdivision
of , then we write  . Given
. Given  and
and
 with and
with and  , there exists a shortest path
, there exists a shortest path  with
with  and
and  .
We call the shortest common subdivision
of and and we denote it
by
.
We call the shortest common subdivision
of and and we denote it
by  .
.
Given an analytic function at the origin, which
can be continued analytically along a path  ,
we will denote by the value of
at the endpoint of the path and by
,
we will denote by the value of
at the endpoint of the path and by  the analytic
function at zero, such that
the analytic
function at zero, such that  for all sufficiently
small
for all sufficiently
small  . If , then we will also write
. If , then we will also write  . The domain
. The domain  of is the set of all paths
along which can be continued analytically.
of is the set of all paths
along which can be continued analytically.
2.4Effective analytic functions
A quasi-effective analytic function is an instance of the abstract data type  ,
which inherits from , and
with the following additional method:
,
which inherits from , and
with the following additional method:
We will denote by the analytic function which is
represented by . The
domain  of is
the set of all paths
of is
the set of all paths  with
with

for all  . The functions and
. The functions and  may be extended to the
class , for all paths which
are in the domain of .
may be extended to the
class , for all paths which
are in the domain of .
Remark 3Notice that,
similarly as in remark 2, we have reused the notation  in order to denote the application of the method
in order to denote the application of the method  to
to  . So
is again a quasi-effective analytic function,
which should be distinguished from
. So
is again a quasi-effective analytic function,
which should be distinguished from  .
Given , we will also denote
.
Given , we will also denote
 and .
and .
Let and  be two
quasi-effective analytic functions. We will write
be two
quasi-effective analytic functions. We will write  as soon as
as soon as  . We say that
and are strongly equal, and we write
. We say that
and are strongly equal, and we write
 , if
, if  and
and  and
and  for all
for all  and
and  . We
say that is better than , if
. We
say that is better than , if  ,
and
,
and  and
and  for all and . We
say that a quasi-effective analytic function
satisfies the homotopy condition, if
for all and . We
say that a quasi-effective analytic function
satisfies the homotopy condition, if
-
EA1
-
If  , then
, then  .
.
Here we understand that  if
if  .
.
Let be a quasi-effective analytic function and
consider the functions  and
and  . We say that satisfies
the local continuity condition, if there exist continuous
functions
. We say that satisfies
the local continuity condition, if there exist continuous
functions

such that  and
and  for all
for all
 and
and  with
with  . We say that satisfies
the continuity condition, if
. We say that satisfies
the continuity condition, if
-
EA2
-
satisfies the local continuity condition
for each  .
.
We say that is an effective analytic
function if it both satisfies the homotopy condition and the
continuity condition. In what follows, we will always assume that
instances of the type satisfy the conditions
EA1 and EA2.
Remark 4In fact, there
are several alternatives for the definition of effective analytic
functions, by changing the homotopy and continuity conditions. The
future will learn us which conditions are best suited for complex
computations. Nevertheless, there is no doubt that the
“spirit” of the definition should be preserved:
quasi-effectiveness plus additional conditions which will allow us to
prove global properties.
2.5Analytic continuation along
subdivided paths
The extended domain  of an effective
analytic function is the set of all paths , such that there exists a
subdivision of with
of an effective
analytic function is the set of all paths , such that there exists a
subdivision of with
 . For a tuple
. For a tuple  of effective analytic functions, we also define
of effective analytic functions, we also define  and similarly for and
and similarly for and  . We say that an effective analytic function
(or a tuple of such functions) is
faithful, if
. We say that an effective analytic function
(or a tuple of such functions) is
faithful, if  . We
say that a subset
. We
say that a subset  of is
effective, if there exists an algorithm to decide whether a
given effective path belongs to .
of is
effective, if there exists an algorithm to decide whether a
given effective path belongs to .
Now let us choose constants  with
with  and consider an effective analytic function . Then the following algorithm may be used in
order to evaluate at any path
and consider an effective analytic function . Then the following algorithm may be used in
order to evaluate at any path  :
:
Algorithm 
Output
Step 1 [Handle trivial cases]
If  , then return
, then return 
Write 
If  then return
then return 
Let 
Return 
We notice that implies  and
and  implies
implies  .
The correctness proof of this algorithm relies on three lemmas:
.
The correctness proof of this algorithm relies on three lemmas:
Lemma 5Let
 with
with  .
Then
.
Then  .
.
ProofLet us proof the lemma by induction over
the difference  of the lengths of
of the lengths of  and
and  . If
. If  , then
, then  and
we are done. Otherwise, let be longest, such
that there exist paths
and
we are done. Otherwise, let be longest, such
that there exist paths  and
and  and numbers
and numbers  and
and  with
with
 and
and  .
If
.
If  , then the induction
hypothesis implies
, then the induction
hypothesis implies

Otherwise, we have  and
and  . Consequently, the homotopy condition implies that
. Consequently, the homotopy condition implies that
 , whence
, whence  .
.
Remark 6In fact, the
above lemma even holds for homotopic paths ,
but we will not need this in what follows.
Lemma 7If
 are such that
are such that  and
and  , then
, then  .
.
ProofLet  .
Let us prove by induction over
.
Let us prove by induction over  that
that  . If
. If  ,
then we have nothing to do. Assume now that we have proved the assertion
for a given
,
then we have nothing to do. Assume now that we have proved the assertion
for a given  and let us prove it for
and let us prove it for  . Since
. Since  is the shortest
common subdivision of and , there exist a
is the shortest
common subdivision of and , there exist a  and a path
and a path
 , such that
, such that  . By lemma 5, we have
. By lemma 5, we have  . Therefore,
. Therefore,  ,
where
,
where  is such that
is such that  .
This shows that
.
This shows that  , as
desired.
, as
desired.
Lemma 8Let
 . Then there exists a
. Then there exists a  such that for any ,
with
such that for any ,
with  for some
for some  ,
we have
,
we have  .
.
ProofWrite and let
 . The continuity condition
implies that the function
. The continuity condition
implies that the function  is the restriction of
a continuous function
is the restriction of
a continuous function  on the compact set
on the compact set  . Consequently, there exists a
lower bound
. Consequently, there exists a
lower bound  for on
for on  . On the other hand, any , with for
some , is a subdivision of a
path of the form
. On the other hand, any , with for
some , is a subdivision of a
path of the form  with
with  . Taking
. Taking  ,
we conclude by lemma 5.
,
we conclude by lemma 5.
Proof of the algorithmThe algorithm is
clearly correct if it terminates. Assume that the algorithm does not
terminate for and let  be
a subdivision of
be
a subdivision of  in
in  . Let
. Let  be the sequence of
increments, such that
be the sequence of
increments, such that  is called successively for
is called successively for
 . Let
be the constant we find when applying lemma 8 to . Since
. Let
be the constant we find when applying lemma 8 to . Since  , there exists an with
, there exists an with  .
.
Now let  and let
and let  be such
that
be such
that  and
and  .
Then
.
Then  . By lemma 7,
it follows that
. By lemma 7,
it follows that  . Hence
. Hence  . This yields the desired
contradiction, since
. This yields the desired
contradiction, since  .
.
3Operations on effective analytic
functions
In this section we will show how to effectively construct elementary
analytic functions from the constants in and the
identity function , using the
operations  and .
In our specifications of the corresponding concrete data types which
inherit from , we will omit
the algorithms for computing the coefficients of the series expansions,
and refer to [vdH02c, ?] for a detailed treatment of this matter.
and .
In our specifications of the corresponding concrete data types which
inherit from , we will omit
the algorithms for computing the coefficients of the series expansions,
and refer to [vdH02c, ?] for a detailed treatment of this matter.
3.1Basic effective analytic functions
Constant effective analytic functions are implemented by the following
concrete type  which derives from (this is reflected through the
which derives from (this is reflected through the  symbol below):
symbol below):
Class 
The method  is the constructor for . In the method it is
shown how to call the constructor. In a similar way, the following data
type implements the identity function:
is the constructor for . In the method it is
shown how to call the constructor. In a similar way, the following data
type implements the identity function:
Class 
The default constructor with zero arguments returns the identity
function centered at . The
other constructor with one argument returns the
identity function centered at .
The conditions EA1 and EA2 are
trivially satisfied by the constant functions and the identity function.
They all have domain .
3.2The ring operations
The addition of effective analytic functions is implemented as follows:
Class 
We clearly have  and
and  for
all paths in
for
all paths in  . Consequently,
condition EA1 is satisfied by
. Consequently,
condition EA1 is satisfied by  . Since
. Since  is a continuous
function, condition EA2 is also satisfied.
is a continuous
function, condition EA2 is also satisfied.
Subtraction is implemented in the same way as addition: only the series
computation changes. Multiplication is implemented as follows:
Class 
We again have  and the conditions
EA1 and EA2 are verified in a similar
way as in the case of addition.
and the conditions
EA1 and EA2 are verified in a similar
way as in the case of addition.
3.3Differentiation and
integration
In order to differentiate an effective analytic function , we have to be able to bound  on each disk
on each disk  with
with  .
Fixing a number
.
Fixing a number  , this can be
done as follows:
, this can be
done as follows:
Class 
Let us show that the bound for the norm is indeed correct. Given the
bound  for
for  on
on  , Cauchy's formula implies that
, Cauchy's formula implies that
 for all .
Consequently, for all
for all .
Consequently, for all  :
:

We have  and the fact that
and the fact that  is a constant, which is fixed once and for all, ensures that condition
EA2 is again satisfied by .
The actual choice of is a compromise between
keeping as small as possible while keeping
is a constant, which is fixed once and for all, ensures that condition
EA2 is again satisfied by .
The actual choice of is a compromise between
keeping as small as possible while keeping  as large as possible.
as large as possible.
Bounding the value of an integral on a disk is simpler, using the
formula
For the analytic continuation of integrals, we have to keep track of the
integration constant, which can be determined using the evaluation
algorithm from section 2.2. In the algorithm below, this
integration constant corresponds to  .
.
Class 
The domain of  is the same as the domain of .
is the same as the domain of .
3.4Inversion
In order to compute the inverse  of an effective
analytic function with
of an effective
analytic function with  , we should in particular show how to compute a
lower bound for the norm of the smallest zero. Moreover, this
computation should be continuous as a function of the path. Again, let
be a parameter and consider
, we should in particular show how to compute a
lower bound for the norm of the smallest zero. Moreover, this
computation should be continuous as a function of the path. Again, let
be a parameter and consider
Class 
Again, the choice of is a compromise between
keeping  reasonably large, while keeping the
bound
reasonably large, while keeping the
bound  as small as possible. We have
as small as possible. We have

Notice that we cannot necessarily test whether  . Consequently,
. Consequently,  is not
necessarily effective.
is not
necessarily effective.
Remark 9Instead of
fixing a  , it is also
possible to compute
, it is also
possible to compute  such that
such that
using a fast algorithm for finding zeros, like the secant method.
3.5Exponentiation and logarithm
The logarithm of an effective analytic function
can be computed using the formula

As to exponentiation, we use the following method:
Class 
We have  and
and  .
.
4Solving differential
equations
In this section, we will show how to effectively solve linear and
algebraic differential equations. As in the previous section, we will
omit the algorithms for computing the series expansions and refer to
[vdH02c, ?]. We will use the classical majorant technique from
Cauchy-Kovalevskaya in order to compute effective bounds.
Given two power series  , we
say that is majored by , and we write
, we
say that is majored by , and we write  ,
if
,
if  and
and  for all
for all  . If
. If  and
and
 , then we write if
, then we write if  . Given
. Given
 , we also denote
, we also denote  .
.
4.1Linear differential equations
Let  be effective analytic functions and consider
the equation
be effective analytic functions and consider
the equation
 |
(1) |
with initial conditions  in . We will show that the unique solution to this
equation can again be represented by an effective analytic function
, with
in . We will show that the unique solution to this
equation can again be represented by an effective analytic function
, with  . Notice that any linear differential equation of
the form
. Notice that any linear differential equation of
the form  with
with  can be
reduced to the above form (using division by
can be
reduced to the above form (using division by  , differentiation, and linearity if
, differentiation, and linearity if  ).
).
We first notice that the coefficients of may be
computed recursively using the equation
 |
(2) |
Assume that  and
and  are such
that
are such
that  for all .
Then the equation
for all .
Then the equation
 |
(3) |
is a majorant equation [vK75, ?; Car61, ?] of (2) for any
choices of  and
and  ,
such that
,
such that  . Let
. Let
We take  for all
for all  ,
where
,
where

Now we observe that

Therefore, we may take

This choice ensures that (3) has the particularly simple
solution  . The majorant
technique now implies that
. The majorant
technique now implies that  .
.
From the algorithmic point of view, let  and
assume that we want to compute a bound for on
and
assume that we want to compute a bound for on
 for some
for some  .
Let be a fixed constant. Then we may apply the
above computation for
.
Let be a fixed constant. Then we may apply the
above computation for  with
with  and
and  . From the majoration
, we deduce in particular
that
. From the majoration
, we deduce in particular
that

This leads to the following effective solution of (1):
Class 
Like in C++, the keyword  stands for the current instance of the data type, which is implicit to
the method. The
stands for the current instance of the data type, which is implicit to
the method. The  method is given by
method is given by
Method 
Return 
We have proved the following theorem:
Theorem 10Let
be effective analytic functions and let  . Then there exists a faithful
effective analytic solution to (1) with
. Then there exists a faithful
effective analytic solution to (1) with  .
In particular, if
.
In particular, if  is effective, then so is .
is effective, then so is .
4.2Systems of algebraic differential
equations
Let us now consider a system of algebraic differential equations
 |
(4) |
with initial conditions  in , where
in , where  are polynomials
in
are polynomials
in  variables with coefficients in . Modulo the change of variables
variables with coefficients in . Modulo the change of variables

we obtain a new system
 |
(5) |
with initial conditions  .
.
Let  and be such that
and be such that

for all . Then the system of
differential equations
 |
(6) |
with initial conditions  is a majorant system of
(5). The unique solution of this system therefore satisfies
is a majorant system of
(5). The unique solution of this system therefore satisfies
 for all .
Now the
for all .
Now the  really all satisfy the same first order
equation
really all satisfy the same first order
equation

with the same initial condition  .
The unique solution of this equation is
.
The unique solution of this equation is

which is a power series with radius of convergence
and positive coefficients, so that  for any .
for any .
As to the implementation, we may fix  .
We will denote the transformed polynomials
.
We will denote the transformed polynomials  by
by
 . We will also write
. We will also write  for the smallest number with
for the smallest number with
 . The implementation uses a
class
. The implementation uses a
class  with information about the entire system
of equations and solutions and a class
with information about the entire system
of equations and solutions and a class  for each
of the actual solutions
for each
of the actual solutions  .
.
Class 
Class 
In contrast with the linear case, the domain of the solution  to (4) is not necessarily effective.
Nevertheless, the solution is faithful:
to (4) is not necessarily effective.
Nevertheless, the solution is faithful:
Theorem 11Let
be polynomials with coefficients in  and let
and let  . Then the system (4)
admits a faithful effective analytic solution
. Then the system (4)
admits a faithful effective analytic solution  .
.
ProofLet  .
Let us prove by induction over
.
Let us prove by induction over  that
that  . For we have nothing
to prove, so assume that
. For we have nothing
to prove, so assume that  .
For all
.
For all  , let
, let

Then  is a continuous function, which admits a
global maximum
is a continuous function, which admits a
global maximum  on
on  .
Now let
.
Now let  be such that and
let
be such that and
let  be such that and
be such that and
 . Then we have
. Then we have  and
and  . This
proves that
. This
proves that  and we conclude by induction.
and we conclude by induction.
Remark 12In principle,
it is possible to replace the algebraic differential equations by more
general non-linear differential equations, by taking convergent power
series for the  . However,
this would require the generalization of the theory in this paper to
analytic functions in several variables (interesting exceptions are
power series which are polynomial in all but one variable, or entire
functions). One would also need to handle the transformations
. However,
this would require the generalization of the theory in this paper to
analytic functions in several variables (interesting exceptions are
power series which are polynomial in all but one variable, or entire
functions). One would also need to handle the transformations  with additional care; these transformations really
correspond to the analytic continuation of the .
with additional care; these transformations really
correspond to the analytic continuation of the .
5Conclusion and final remarks
Using a careful definition of effective analytic functions, we have
shown how to answer many numerical problems about analytic solutions to
differential equations. In order to generalize the present theory to
analytic functions in several variables or more general analytic
functions, like solutions to convolution equations, we probably have to
weaken the conditions EA1 and EA2.
Nevertheless, it is plausible that further research will lead to a more
suitable definition which preserves the spirit of the present one.
The Columbus program implements the approach of
the present paper in the weaker setting of double precision complex
numbers instead of effective complex numbers. We plan to describe this
program in more details in a forthcoming paper and in particular the
“radar algorithm” which is used to graphically represent
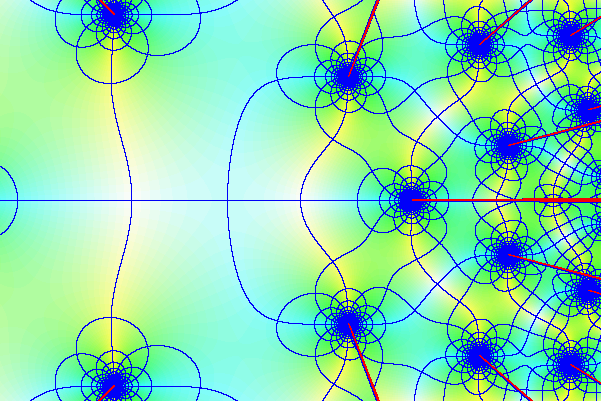
analytic functions (see figure 1). It would be nice to
adapt or reimplement the Columbus program so as to
permit computations with effective complex numbers when desired.
 |
|
Fig. 1. Plot of a solution to  with the Columbus
program. with the Columbus
program.
|
The implementation of the Columbus program has
also been instructive for understanding the complexity of our
algorithms. For instance, the lower bound for the smallest zero in our
algorithm for inversion can be extremely bad, as in the example
The problem here is that the effective radius of convergence is of the
order of  , while the real
radius is . Consequently, the
analytic continuation from to
, while the real
radius is . Consequently, the
analytic continuation from to  will take
will take  steps instead of only . In the Columbus
program, this problem has been solved by using a numerical algorithm in
order to determine the radius of convergence instead of the
theoretically correct one. In some cases, this leads to an exponential
speedup. Theoretically correct approaches for solving the problem are to
compute the smallest zero of the denominator in an appropriate radius or
to use transseries-like expansions. We plan to explain these approaches
in more detail in a forthcoming paper.
steps instead of only . In the Columbus
program, this problem has been solved by using a numerical algorithm in
order to determine the radius of convergence instead of the
theoretically correct one. In some cases, this leads to an exponential
speedup. Theoretically correct approaches for solving the problem are to
compute the smallest zero of the denominator in an appropriate radius or
to use transseries-like expansions. We plan to explain these approaches
in more detail in a forthcoming paper.
Another trick which can be used in concrete implementations is to
override the default evaluation method from section 2.5 by
a more efficient one when possible, or to implement methods for the
evaluation or computation of higher derivatives.
References
-
[BB85]
-
E. Bishop and D. Bridges. Foundations of
constructive analysis. Die Grundlehren der mathematische
Wissenschaften. Springer, Berlin, 1985.
-
[Car61]
-
H. Cartan. Théorie
élémentaire des fonctions analytiques d'une et
plusieurs variables. Hermann, 1961.
-
[CC90]
-
D.V. Chudnovsky and G.V. Chudnovsky. Computer
algebra in the service of mathematical physics and number
theory (computers in mathematics, stanford, ca, 1986). In
Lect. Notes in Pure and Applied Math., volume 125,
pages 109–232, New-York, 1990. Dekker.
-
[DL84]
-
J. Denef and L. Lipshitz. Power series solutions of
algebraic differential equations. Math. Ann.,
267:213–238, 1984.
-
[DL89]
-
J. Denef and L. Lipshitz. Decision problems for
differential equations. The Journ. of Symb. Logic,
54(3):941–950, 1989.
-
[Kho91]
-
A. G. Khovanskii. Fewnomials. American
Mathematical Society, Providence, RI, 1991.
-
[PG97]
-
A. Péladan-Germa. Tests effectifs de
nullité dans des extensions d'anneaux
différentiels. PhD thesis, Gage, École
Polytechnique, Palaiseau, France, 1997.
-
[Ris75]
-
R.H. Risch. Algebraic properties of elementary
functions in analysis. Amer. Journ. of Math.,
4(101):743–759, 1975.
-
[Sha89]
-
J. Shackell. A differential-equations approach to
functional equivalence. In Proc. ISSAC '89, pages
7–10, Portland, Oregon, A.C.M., New York, 1989. ACM
Press.
-
[Sha93]
-
J. Shackell. Zero equivalence in function fields
defined by differential equations. Proc. of the A.M.S.,
336(1):151–172, 1993.
-
[SvdH01]
-
J.R. Shackell and J. van der Hoeven. Complexity
bounds for zero-test algorithms. Technical Report 2001-63,
Prépublications d'Orsay, 2001.
-
[vdH99]
-
J. van der Hoeven. Fast evaluation of holonomic
functions. TCS, 210:199–215, 1999.
-
[vdH01a]
-
J. van der Hoeven. Fast evaluation of holonomic
functions near and in singularities. JSC,
31:717–743, 2001.
-
[vdH01b]
-
J. van der Hoeven. Zero-testing, witness
conjectures and differential diophantine approximation.
Technical Report 2001-62, Prépublications d'Orsay,
2001.
-
[vdH02a]
-
Joris van der Hoeven. Columbus. http://www.math.u-psud.fr/~vdhoeven/Columbus/
Columbus.html, 2000–2002.
-
[vdH02b]
-
Joris van der Hoeven. A new zero-test for formal
power series. In Teo Mora, editor, Proc. ISSAC '02,
pages 117–122, Lille, France, July 2002.
-
[vdH02c]
-
Joris van der Hoeven. Relax, but don't be too lazy.
JSC, 34:479–542, 2002.
-
[vdH03]
-
J. van der Hoeven. Majorants for formal power
series. Technical Report 2003-15, Université Paris-Sud,
2003.
-
[vK75]
-
S. von Kowalevsky. Zur Theorie der partiellen
Differentialgleichungen. J. Reine und Angew. Math.,
80:1–32, 1875.
 which returns a lower bound
which returns a lower bound  for
for  which, given
which, given  ,
, and
and  with
with  for
for
 computes
computes  and
and  ,
, of
of  with
with  .
.















 ,
,


 ,
,








 ,
,








 ,
,



 ,
,