From implicit to recursive
equations |
|
| August 30, 2018 |
|
 . This work has
been supported by the ANR-09-JCJC-0098-01
. This work has
been supported by the ANR-09-JCJC-0098-01
The technique of relaxed power series expansion provides an
efficient way to solve so called recursive equations of the form
|
Let  be an effective field of constants of
characteristic zero. This means that elements in
can be encoded by data structures on a computer and that we have
algorithms for performing the field operations of .
be an effective field of constants of
characteristic zero. This means that elements in
can be encoded by data structures on a computer and that we have
algorithms for performing the field operations of .
Let  be a column vector of
be a column vector of  indeterminate series in
indeterminate series in  . We
may also consider
. We
may also consider  as a power series
as a power series  . Let
. Let  be a column
vector of expressions built up from ,
be a column
vector of expressions built up from ,
 and constants in using
ring operations, differentiation and integration (with constant term
zero). Finally, let
and constants in using
ring operations, differentiation and integration (with constant term
zero). Finally, let  be a finite number of
initial conditions. Assume that the system
be a finite number of
initial conditions. Assume that the system
 |
(1) |
admits a unique solution  . In
this paper, we are interested in the efficient computation of this
solution up to a given order
. In
this paper, we are interested in the efficient computation of this
solution up to a given order  .
.
In the most favourable case, the equation  is of
the form
is of
the form
where the coefficient  of
of  in
in  only depends on earlier coefficients
only depends on earlier coefficients  of
of  , for
each
, for
each  . In that case,
. In that case,

actually provides us with a recurrence relation for the computation of
the solution. Using the technique of relaxed power series expansions [Hoe02, Hoe07], which will briefly be recalled in
section 2.4, it is then possible to compute the expansion
 at order in time
at order in time
where  is the number of multiplications occurring
in
is the number of multiplications occurring
in  ,
,  is the total size of as an expression, and
is the total size of as an expression, and  denotes the complexity of relaxed multiplication of
two power series at order .
Here we assume that is represented by a directed
acyclic graph, with possible common subexpressions. For large , it was shown in [Hoe02,
FS74, Hoe03, LS16] that
denotes the complexity of relaxed multiplication of
two power series at order .
Here we assume that is represented by a directed
acyclic graph, with possible common subexpressions. For large , it was shown in [Hoe02,
FS74, Hoe03, LS16] that  , where
, where  denotes the complexity [CT65, SS71, CK91]
of multiplying two polynomials of degrees
denotes the complexity [CT65, SS71, CK91]
of multiplying two polynomials of degrees  .
More recently, it has been shown [Hoe14, Hoe07]
that we even have
.
More recently, it has been shown [Hoe14, Hoe07]
that we even have  . For
moderate , when polynomial
multiplication is done naively or using Karatsuba's method, relaxed
multiplication is as efficient as the truncated multiplication of
polynomials at order [Hoe97, Hoe02].
. For
moderate , when polynomial
multiplication is done naively or using Karatsuba's method, relaxed
multiplication is as efficient as the truncated multiplication of
polynomials at order [Hoe97, Hoe02].
One particularly important example of an equation of the above type is the integration of a dynamical system
where is algebraic (i.e. does not
involve differentiation or integration). In that case, given the
solution at order ,
we may consider the linearized system

at order  , where
, where  stands for the Jacobian matrix associated to at . If we have
a fundamental system of solutions of
stands for the Jacobian matrix associated to at . If we have
a fundamental system of solutions of  at order
, then one step of Newton's
method allows us to find the solution of (4) and a new
fundamental system of solutions of the linearized equation at order [BK78, Sed01, BCO+07].
A careful analysis shows that this leads to an algorithm of time
complexity
at order
, then one step of Newton's
method allows us to find the solution of (4) and a new
fundamental system of solutions of the linearized equation at order [BK78, Sed01, BCO+07].
A careful analysis shows that this leads to an algorithm of time
complexity
In [Hoe10], this bound has been further improved to
under the assumptions that admits sufficiently
many  -th roots of unity and
that
-th roots of unity and
that  .
.
Although the complexity (5) is asymptotically better than
(3) for very large ,
the relaxed approach often turns out to be more efficient in practice.
Indeed, Newton's method both suffers from a larger constant factor and
the fact that we profit less from the potential sparsity of the system.
In particular, if  , then the
relaxed approach is generally faster. Moreover, as long as
multiplications are done in the naive or Karatsuba model, the relaxed
approach is optimal in the sense that the computation of the solution
takes roughly the same time as its verification. Another advantage of
the relaxed approach is that it generalizes to more general functional
equations and partial differential equations.
, then the
relaxed approach is generally faster. Moreover, as long as
multiplications are done in the naive or Karatsuba model, the relaxed
approach is optimal in the sense that the computation of the solution
takes roughly the same time as its verification. Another advantage of
the relaxed approach is that it generalizes to more general functional
equations and partial differential equations.
Let us now return to our original implicit system (1). If
 is a system of differentially algebraic
equations, then we may also seek to apply Newton's method. For non
degenerate systems and assuming that we have computed the solution and a fundamental system of solutions for the
linearized equation at order ,
one step of Newton's method yields an extension of the solutions at
order
is a system of differentially algebraic
equations, then we may also seek to apply Newton's method. For non
degenerate systems and assuming that we have computed the solution and a fundamental system of solutions for the
linearized equation at order ,
one step of Newton's method yields an extension of the solutions at
order  , for a fixed constant
, for a fixed constant
 . From an asymptotic point of
view, this means that the complexities (5) and (6)
remain valid, modulo multiplication of by the
differential order of the system in these bounds.
. From an asymptotic point of
view, this means that the complexities (5) and (6)
remain valid, modulo multiplication of by the
differential order of the system in these bounds.
Another approach for the resolution of (1) is to keep
differentiating the system with respect to until
it becomes equivalent to a system of the form (2). For
instance, if is algebraic, then differentiation
of (1) yields

Consequently, if  is invertible, then
is invertible, then

provides us with an equivalent system that can be solved by one of the previous methods. Unfortunately, this method requires the computation of the Jacobian, so we do not longer exploit the potential sparsity of the original system.
Yet another recent approach [Hoe09] is to consider not yet
computed coefficients of as formal unknowns, and
solve the system of equations  for increasing
values of . For large , the system
usually reduces to a linear system of equations. In particular, the
coefficients of series with unknown coefficients are not polynomials but
merely linear combinations. Using the so called “substitution
product”, the multiplication of series with unknown coefficients
can be done while taking advantage of this linearity.
for increasing
values of . For large , the system
usually reduces to a linear system of equations. In particular, the
coefficients of series with unknown coefficients are not polynomials but
merely linear combinations. Using the so called “substitution
product”, the multiplication of series with unknown coefficients
can be done while taking advantage of this linearity.
In this paper, we will present a variant of the approach of [Hoe09].
Roughly speaking, we reconsider the series with unknown coefficients as
vectors of partially unknown series. Technically speaking, this is done
via the concept of anticipators, which will be introduced in
section 3. Using this technique, and under mild
assumptions, we show in section 4.1 how to rewrite the
original system of equations into a new system that is both recursive
and not much larger in size. We may then apply a standard relaxed
algorithm for its resolution. In section 4.2 we show that
this leads to slightly sharper complexity bounds than those from [Hoe09]. Roughly speaking, in the case of a system of differential equations of order  that must be evaluated at order
that must be evaluated at order  in order to
determine the solution at order ,
we prove the following generalization of (3):
in order to
determine the solution at order ,
we prove the following generalization of (3):
 |
(7) |
Especially for larger values of ,
this still compares favourably with respect to (5). Another
major benefit of the new technique is the fact that it allows for the
direct resolution of implicit equations using existing software for
recursive equations.
For algebraic equations over the  -adic
numbers, relaxed algorithms with similar complexities have been
developed in [BL12, Leb15]. The index
-adic
numbers, relaxed algorithms with similar complexities have been
developed in [BL12, Leb15]. The index  in (7) corresponds to the opposite of
the notion of shift in [Leb15]. We notice that a preprint
version of the present paper [Hoe11] appeared shortly
before [BL12], so the main ideas in the present paper were
not influenced by [BL12, Leb15]. Predecessors
of the algorithms in this paper were implemented in
in (7) corresponds to the opposite of
the notion of shift in [Leb15]. We notice that a preprint
version of the present paper [Hoe11] appeared shortly
before [BL12], so the main ideas in the present paper were
not influenced by [BL12, Leb15]. Predecessors
of the algorithms in this paper were implemented in
Our algorithm can for instance been used for the computation of power series solutions to differential-algebraic systems of equations. The well known example of a pendulum is treated in detail in section 5. The reader may wish to fast forward to this example when struggling through the more technical parts of this paper.
Acknowledgments. We wish to thank the referees for their careful reading and their comments and suggestions.
Assume that we have fixed a set  of function
symbols, together with an arity
of function
symbols, together with an arity  for each
for each  . Then a
dag over is a rooted finite
directed acyclic -labeled
graph, such that each
. Then a
dag over is a rooted finite
directed acyclic -labeled
graph, such that each  -labeled
node has successors, together with an ordering
on the successors. For instance,
-labeled
node has successors, together with an ordering
on the successors. For instance,
is a typical dag for the expression  ,
with
,
with  ,
,  and
and  . We will denote by
. We will denote by  the number of nodes of a dag
(also called its size) and by
the number of nodes of a dag
(also called its size) and by  its number of
multiplications (also called its multiplicative size). For our example
dag , we thus have
its number of
multiplications (also called its multiplicative size). For our example
dag , we thus have  and
and  . We will
denote by
. We will
denote by  the set of dags over .
the set of dags over .
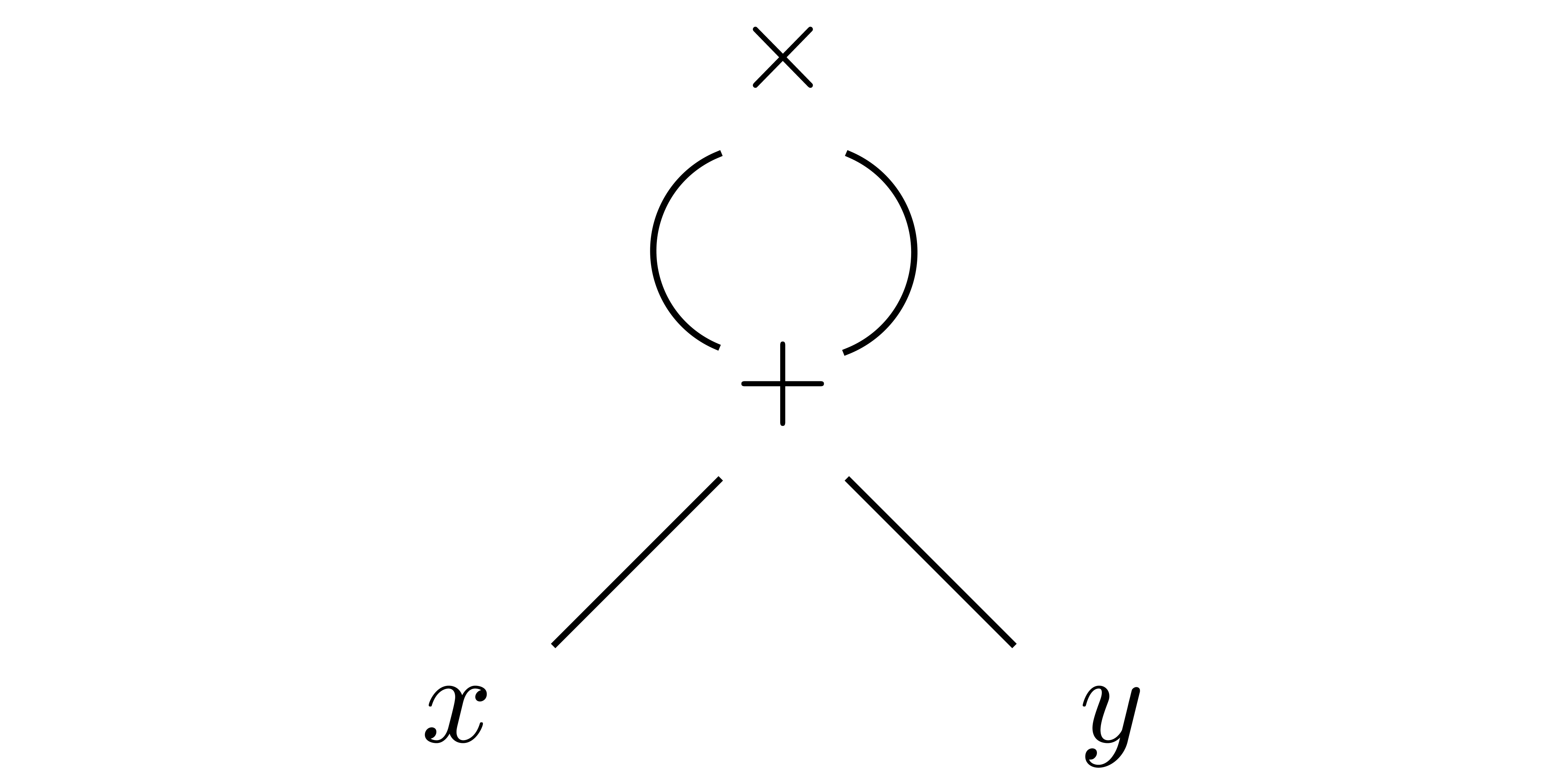
More generally, we may consider multivariate dags with an arbitrary number of roots, which again come with ordering. For instance,
is a bivariate dag that represents a vector of two expressions  and
and  . We will
denote by
. We will
denote by  the number of roots of a multivariate
dag , which we will also call
its dimension. We will write
the number of roots of a multivariate
dag , which we will also call
its dimension. We will write  , where
, where  stands for the
subdag whose root is the -th
root of . We will denote by
stands for the
subdag whose root is the -th
root of . We will denote by
 the set of multivariate dags over of dimension
the set of multivariate dags over of dimension  and
and  .
.
Consider a linear operator  .
We say that is a
coefficientwise operator, if there exist fixed
constants
.
We say that is a
coefficientwise operator, if there exist fixed
constants  such that
such that

for all  . For every
. For every  , the operator
, the operator  defined by
defined by

is an example of a coefficientwise operator. The truncation operators
 ,
,  and
and
 defined by
defined by
constitute another family of examples. We will denote by  and
and  the sets of all operators of
the form with
resp.
the sets of all operators of
the form with
resp.  with . Finally, we define the coefficientwise operators
with . Finally, we define the coefficientwise operators
 and
and  by
by

The operator  is called the Euler
derivation with respect to and we
notice that is the inverse of
on
is called the Euler
derivation with respect to and we
notice that is the inverse of
on  . The Euler derivation
admits the advantage with respect to the ordinary derivation that
. The Euler derivation
admits the advantage with respect to the ordinary derivation that  for all
for all  ,
where “
,
where “ ” stands
for the valuation in .
Nevertheless, any differential equation for the usual derivation can be
rewritten as a differential equation for the Euler derivation: it
suffices to multiply the equation by a sufficiently large power of .
” stands
for the valuation in .
Nevertheless, any differential equation for the usual derivation can be
rewritten as a differential equation for the Euler derivation: it
suffices to multiply the equation by a sufficiently large power of .
Let be
“indeterminate series” in .
We will sometimes consider as a series with
formal coefficients

Let  be a set of coefficientwise linear
operators. In what follows, we will take
be a set of coefficientwise linear
operators. In what follows, we will take

and denote by  the set of dags over
the set of dags over  . Similarly, we set
. Similarly, we set  and
and
 . Dags in
. Dags in  ,
,  and
and  will respectively be called algebraic,
differential and integral. Notice that
polynomials in
will respectively be called algebraic,
differential and integral. Notice that
polynomials in  are regarded as dags of size
are regarded as dags of size
 , independently of their
degree; this is motivated by the fact that coefficient extraction is
trivial for explicit polynomials.
, independently of their
degree; this is motivated by the fact that coefficient extraction is
trivial for explicit polynomials.
Clearly, any dag  can be considered as a function
can be considered as a function
 . Given a small symbolic
perturbation
. Given a small symbolic
perturbation  , we may expand
, we may expand
 as a Taylor series in
as a Taylor series in 

and truncation at order yields

We claim that  can be regarded as a dag in
can be regarded as a dag in  . For instance, if
. For instance, if

then

In general, the claim is easily shown by induction over .
We claim that any dag can be regarded as a
series in

such that each coefficient  is a dag over
is a dag over

Indeed, by induction over the size of ,
we first define the valuation  of by
of by
We next define the coefficients by another
induction over the size of .
If  , then we take
, then we take  . Otherwise, we take
. Otherwise, we take
As a result of the claim, we emphasize that only
depends on the coefficients  in
in  of .
of .
Remark  can be replaced by any algebraically equivalent
formula, as long as only depends on
can be replaced by any algebraically equivalent
formula, as long as only depends on  and
and  . Assuming
the concept of relaxed power series, to be introduced below, this allows
us to compute
. Assuming
the concept of relaxed power series, to be introduced below, this allows
us to compute  using the formula
using the formula

where we may use a relaxed algorithm for the multiplication  . From now on, we will assume that all products
are expanded in this way.
. From now on, we will assume that all products
are expanded in this way.
Let us briefly recall the technique of relaxed power series
computations, which is explained in more detail in [Hoe02].
In this computational model, a power series  is
regarded as a stream of coefficients
is
regarded as a stream of coefficients  .
When performing an operation
.
When performing an operation  on power series it
is required that the coefficient
on power series it
is required that the coefficient  of the result
is output as soon as sufficiently many coefficients of the inputs are
known, so that the computation of does not
depend on the further coefficients. For instance, in the case of a
multiplication
of the result
is output as soon as sufficiently many coefficients of the inputs are
known, so that the computation of does not
depend on the further coefficients. For instance, in the case of a
multiplication  , we require
that
, we require
that  is output as soon as
is output as soon as  and
and  are known. In particular, we may use the
naive formula
are known. In particular, we may use the
naive formula  for the computation of .
for the computation of .
The additional constraint on the time when coefficients should be output
admits the important advantage that the inputs may depend on the output,
provided that we add a small delay. For instance, the exponential  of a power series
of a power series  may be
computed in a relaxed way using the formula
may be
computed in a relaxed way using the formula
Indeed, when using the naive formula for products, the coefficient is given by

and the right-hand side only depends on the previously computed
coefficients  .
.
The main drawback of the relaxed approach is that we cannot directly use
fast algorithms on polynomials for computations with power series. For
instance, assuming that has sufficiently many
-th roots of unity and that
field operations in can be done in time  , two polynomials of degrees
, two polynomials of degrees  can be multiplied in time
can be multiplied in time  , using FFT multiplication [CT65].
Given the truncations and
, using FFT multiplication [CT65].
Given the truncations and  at order of power series
at order of power series  , we may thus compute the truncated product
, we may thus compute the truncated product  in time
in time  as well. This is much
faster than the naive
as well. This is much
faster than the naive  relaxed multiplication
algorithm for the computation of .
However, the formula for
relaxed multiplication
algorithm for the computation of .
However, the formula for  when using FFT
multiplication depends on all input coefficients
and , so the fast algorithm
is not relaxed. Fortunately, efficient relaxed multiplication algorithms
do exist:
when using FFT
multiplication depends on all input coefficients
and , so the fast algorithm
is not relaxed. Fortunately, efficient relaxed multiplication algorithms
do exist:
 be the
time complexity for the multiplication of polynomials of degrees
be the
time complexity for the multiplication of polynomials of degrees  in .
Then there exists a relaxed multiplication algorithm for series in
of time complexity
in .
Then there exists a relaxed multiplication algorithm for series in
of time complexity  .
.
 .
.
In what follows, we will denote by  the
complexity of relaxed multiplication at order . Let us now consider a general equation of the form
the
complexity of relaxed multiplication at order . Let us now consider a general equation of the form
where  an -dimensional
dag. We say that (8) is a recursive
equation, if each coefficient
an -dimensional
dag. We say that (8) is a recursive
equation, if each coefficient  only
depends on earlier coefficients
only
depends on earlier coefficients  of . That is,
of . That is,  for all
. In order to solve (8)
at order , we then need to
perform relaxed multiplications at order and coefficientwise
operations
for all
. In order to solve (8)
at order , we then need to
perform relaxed multiplications at order and coefficientwise
operations  or
or  at order
. This yields the following
complexity bound:
at order
. This yields the following
complexity bound:
When solving an implicit equation in using a
relaxed algorithm, the coefficients  are computed
only gradually. During the resolution process, it might happen that we
wish to evaluate dags at higher orders than the number of known
coefficients of . That is,
given
are computed
only gradually. During the resolution process, it might happen that we
wish to evaluate dags at higher orders than the number of known
coefficients of . That is,
given  and
and  ,
we might need
,
we might need  , even though
only are known. In that case, we have a problem,
but we may still do the best we can, and compute
, even though
only are known. In that case, we have a problem,
but we may still do the best we can, and compute  instead of .
instead of .
This motivates the introduction of the -th
order anticipator  of by
of by

where we recall that  and
and  . On the one hand, we will show in this section that
. On the one hand, we will show in this section that
 can be computed simultaneously by a dag of multiplicative size
can be computed simultaneously by a dag of multiplicative size  and
total size
and
total size  . On the other
hand, we will show that is essentially a linear
perturbation of , that can be
computed explicitly.
. On the other
hand, we will show that is essentially a linear
perturbation of , that can be
computed explicitly.
as
a dag
Let us show how to compute a dag for .
The following rules are straightforward:
As to multiplication, for  ,
we have
,
we have
where  stands for the operator with
stands for the operator with  and similarly for
and similarly for  .
Consequently,
.
Consequently,
for some polynomial  with
with  and
and  (in particular,
(in particular,  ). Notice also that
). Notice also that
Now assume that  and
and  are
known. Then we may simultaneously compute
are
known. Then we may simultaneously compute  in the
following way:
in the
following way:
This computation involves one series product and  additions and scalar multiplications. For large , we may further reduce the cost to
additions and scalar multiplications. For large , we may further reduce the cost to  since the computation of
since the computation of  really comes down to
the computation of two truncated power series products
really comes down to
the computation of two truncated power series products  and
and  at order .
In summary, we obtain
at order .
In summary, we obtain
as a perturbation of
Since only depends on , we notice that

In general, for  and
and  , we may expand
, we may expand

Let  denote the
denote the  -th
basis element of
-th
basis element of  , so that
, so that
 for all
for all  .
When considering as a column vector, it follows
by linearity that
.
When considering as a column vector, it follows
by linearity that
where  is a row matrix whose -th entry is given by
is a row matrix whose -th entry is given by

Notice that  depends on , but
depends on , but  does not. Let us
investigate the functions more closely for some
important examples.
does not. Let us
investigate the functions more closely for some
important examples.
Example  is algebraic, then we have
is algebraic, then we have

whence
In particular,  is actually constant.
is actually constant.
Example is differential, of differential order  (this means that is the maximal
number of
(this means that is the maximal
number of  -nodes on a path
from the root of to a leaf), then, considering
as a differential polynomial in
-nodes on a path
from the root of to a leaf), then, considering
as a differential polynomial in  , we have
, we have

whence
 |
is a polynomial of degree at most .
Example is algebraic in  ,
where
,
where  , then
, then

whence
Consequently, there exists a polynomial  of
degree
of
degree  with
with

for all  .
.
Example , it
can be checked by induction over the size of
that  is still a rational function in
is still a rational function in  , that remains bounded for
, that remains bounded for  , and whose denominator has integer
coefficients. Similarly, for any dag
, and whose denominator has integer
coefficients. Similarly, for any dag  where
where  , the expression
is a rational function in ,
whose denominator has integer coefficients.
, the expression
is a rational function in ,
whose denominator has integer coefficients.
Assume now that we want to solve a system of power series equations
 |
(15) |
where  is a vector of dags and
a finite number of initial conditions. For definiteness, it is also
important that (15) admits a unique solution . This will be guaranteed by an even stronger
technical assumption to be detailed below. Roughly speaking, for a given
index
is a vector of dags and
a finite number of initial conditions. For definiteness, it is also
important that (15) admits a unique solution . This will be guaranteed by an even stronger
technical assumption to be detailed below. Roughly speaking, for a given
index  , we
will assume that each coefficient with
, we
will assume that each coefficient with  can be determined as a function of the previous
coefficients using only the equations
can be determined as a function of the previous
coefficients using only the equations  . In fact, we will only use the
equations
. In fact, we will only use the
equations  , which requires us
to assume that
, which requires us
to assume that  in order to determine via (11); this explains why we need
in order to determine via (11); this explains why we need
 initial conditions.
initial conditions.
Let . For each and  , we
introduce the
, we
introduce the  matrix
matrix

the  block matrix
block matrix
the  ,
,  and
and  block column vectors
block column vectors

and the column vector
In view of (11), the equations then
translate into

We will say that (15) is -predictive or predictive
of index , if, for all , there exist  and
and  matrices
matrices  and
and  , such that
, such that

In that case, we have

whence
provides us with an explicit formula for .
Now let  and
and  be the
operators on vectors of power series
be the
operators on vectors of power series  with the
property that
with the
property that  and
and  .
Then we may rewrite (17) into
.
Then we may rewrite (17) into
for a suitable vector  of polynomials in
of polynomials in  of degree
of degree  .
This is the desired recursive equation for .
.
This is the desired recursive equation for .
Example is algebraic, then we recall from Example 6 that

for all  . If
. If  , then it follows that the matrix
, then it follows that the matrix
does not depend on and that it simply equals the
evaluation of the Jacobian matrix of with
respect to  at the “initial
condition”
at the “initial
condition”  . In
particular, the equation (15) is
. In
particular, the equation (15) is  -predictive if and only if this matrix is
invertible.
-predictive if and only if this matrix is
invertible.
Example is of differential
order . If , then it follows in a similar way as above
that

so we may regard  as the evaluation at
as the evaluation at  of a matrix
of a matrix  in
in  of degree in
of degree in  .
In particular, the equation (15) is -predictive for a sufficiently large value of
.
In particular, the equation (15) is -predictive for a sufficiently large value of  if and only if admits an
inverse in
if and only if admits an
inverse in  . More precisely,
if is invertible, then we need
to be larger than each of the poles of
. More precisely,
if is invertible, then we need
to be larger than each of the poles of  (which
are finite in number).
(which
are finite in number).
Example is algebraic and  is such that the
Jacobian matrix
is such that the
Jacobian matrix  evaluated at
evaluated at  admits an inverse
admits an inverse  with Laurent series
coefficients, then it can be shown that the system
with Laurent series
coefficients, then it can be shown that the system  is
is  -predictive for
-predictive for  , whenever
, whenever  . Notice that Example 10 is a special
case of this situation when
. Notice that Example 10 is a special
case of this situation when  and . The observation actually generalizes to more
general dags , for a suitable
interpretation of the inverse
and . The observation actually generalizes to more
general dags , for a suitable
interpretation of the inverse  as a matrix of
operators acting on
as a matrix of
operators acting on  and assuming that is taken sufficiently large. This also means that the
method of this paper can be applied to the same class of equations as a
suitable generalization of Newton's method. However, the details behind
these claims are beyond the scope of this paper.
and assuming that is taken sufficiently large. This also means that the
method of this paper can be applied to the same class of equations as a
suitable generalization of Newton's method. However, the details behind
these claims are beyond the scope of this paper.
Remark
Let us first consider the case of an algebraic dag . In that case, the matrix  does not depend on and its coefficients are
explicitly given by (12). We may now determine and matrices
and with
does not depend on and its coefficients are
explicitly given by (12). We may now determine and matrices
and with
using Gaussian elimination in order, and whenever such matrices exist.
The equation -predictive, if and only if this is indeed
possible.
-predictive
equation is algebraic. Then we may compute
terms of its unique solution  in time
in time

Proof. By what precedes, the operators  and
and  in (18) are
really the constant matrices from (19). By lemma 5,
the size of the righthand side of (18) as a dag is
therefore bounded by
in (18) are
really the constant matrices from (19). By lemma 5,
the size of the righthand side of (18) as a dag is
therefore bounded by  and its multiplicative size
is exactly . The result thus
follows from proposition 4.
and its multiplicative size
is exactly . The result thus
follows from proposition 4.
Assume now that . Then we
claim that there exists an algorithms for checking -predictivity and constructing a general
formula for the corresponding matrices and . Indeed, we recall from section 3.2 that is the evaluation at  of a matrix with entries in
of a matrix with entries in
 and denominators in
and denominators in  . We may thus use Gaussian elimination in order to
compute and matrices
. We may thus use Gaussian elimination in order to
compute and matrices
 and
and  with entries in and
with entries in and

whenever such matrices exist. For those that are
not positive integer roots of one of the denominators of the entries of
, we now have  and
and  . For each
of the finite number of integer roots ,
we may directly compute the matrices and by Gaussian elimination over , whenever such matrices exist.
. For each
of the finite number of integer roots ,
we may directly compute the matrices and by Gaussian elimination over , whenever such matrices exist.
-predictive
equation be the maximal degree of an entry of . Then we may compute
terms of the solution to

Proof. The computation of
(and the finite number of exceptional for which
is a root of one of the denominators) is a
precomputation. The determination of every next
can be done in time  , via a
diagonal translation of
, via a
diagonal translation of  and evaluation of the
and evaluation of the
 rational functions that are the entries of the
bottom
rational functions that are the entries of the
bottom  submatrix. Now assume that we maintain
upper and lower triangular matrices
submatrix. Now assume that we maintain
upper and lower triangular matrices  ,
,
 and a permutation matrix
and a permutation matrix  at each stage such that
at each stage such that  .
Then the determination of ,
and as a function of
.
Then the determination of ,
and as a function of
 and
and  can be done in time
can be done in time
 using naive linear algebra. The determination of
and from , and
can again be done in time .
Consequently, the cost of applying the operators
and during the relaxed resolution of (18)
at order is bounded by
using naive linear algebra. The determination of
and from , and
can again be done in time .
Consequently, the cost of applying the operators
and during the relaxed resolution of (18)
at order is bounded by  . The cost of the evaluation of the remaining dag is
bounded by
. The cost of the evaluation of the remaining dag is
bounded by  , as in the
algebraic case.
, as in the
algebraic case.
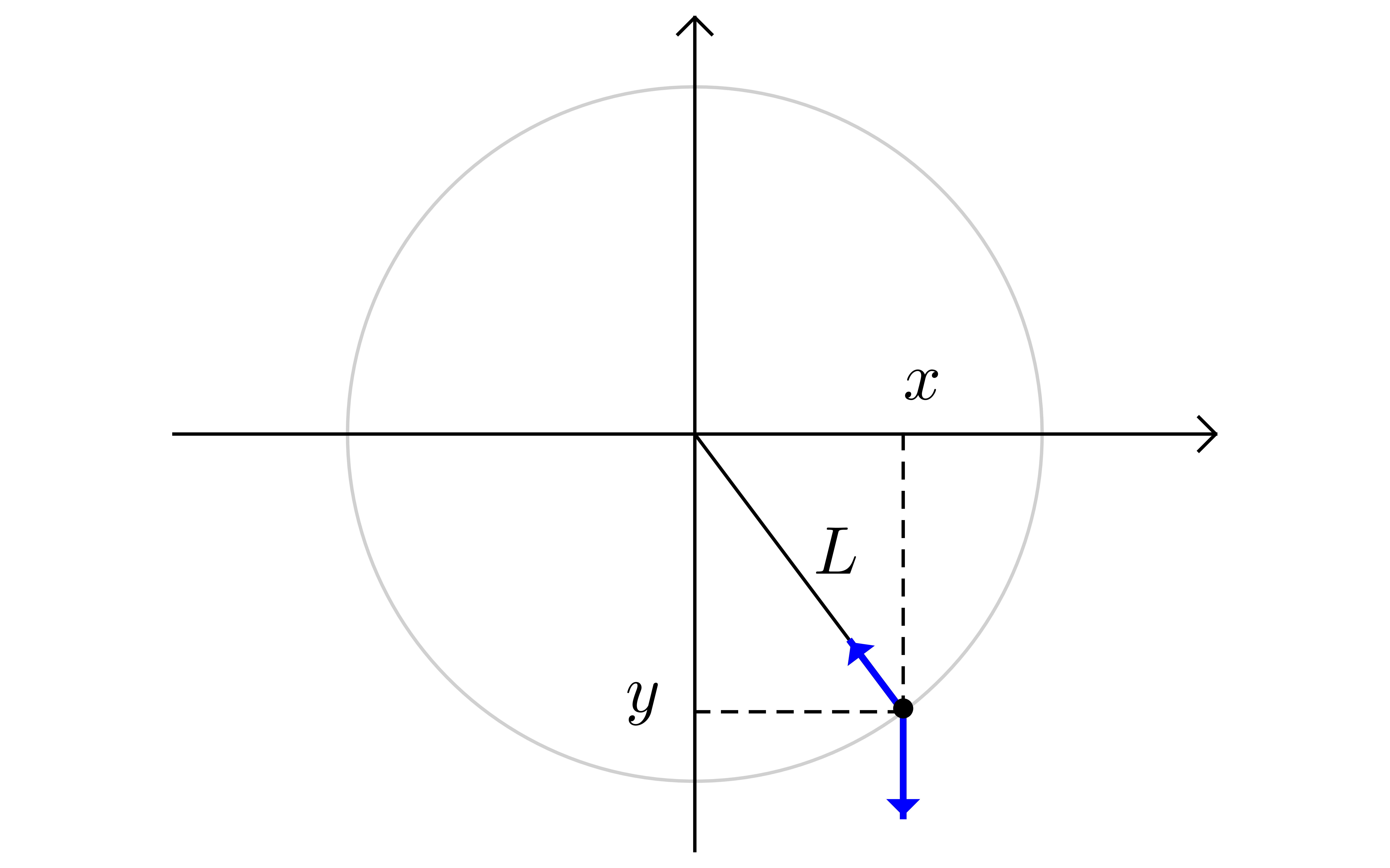
The prototype application of the techniques in this paper is the integration of differential-algebraic systems of equations. Let us consider the traditional example of a pendulum, whose equations are given by
Here
 ,
,
 ,
,
 ,
,
 ,
,
 are the unknowns and
are the unknowns and
 ,
,
 are constant parameters; see Figure
1
.
are constant parameters; see Figure
1
.
:
Setting  , the latter system
corresponds the following system using our
notations:
, the latter system
corresponds the following system using our
notations:
The order one anticipators of these equations are given by
and the Jacobian matrix of is given by
For the initial conditions, one typically takes  ,
,  ,
,  , and
, and  .
For these initial conditions, the formula for the Jacobian implies
.
For these initial conditions, the formula for the Jacobian implies
For every , this matrix
admits the inverse
Now consider the operator
This operator is the coefficientwise operator with  for all
for all  and .
The desired recursive equation (18) for
is therefore given by
and .
The desired recursive equation (18) for
is therefore given by

or, equivalently,
One may now use any traditional relaxed evaluation algorithm in order to compute the power series solution:
This shows how our algorithm applies to the derived index formulation of the equations of the pendulum. In fact, our
algorithm can also be applied directly to the original system of index
 , which we indeed regard as a
major advantage of the method. However, the resulting matrices have size
, which we indeed regard as a
major advantage of the method. However, the resulting matrices have size  ,
which makes this variant less suitable for pedagogic purposes.
,
which makes this variant less suitable for pedagogic purposes.
A. Bostan, F. Chyzak, F. Ollivier, B. Salvy, É. Schost, and A. Sedoglavic. Fast computation of power series solutions of systems of differential equations. In Proceedings of the 18th ACM-SIAM Symposium on Discrete Algorithms, pages 1012–1021. New Orleans, Louisiana, U.S.A., January 2007.
R. P. Brent and H. T. Kung. Fast algorithms for manipulating formal power series. Journal of the ACM, 25:581–595, 1978.
J. Berthomieu and R. Lebreton. Relaxed -adic hensel lifting for algebraic
systems. In J. van der Hoeven and M. van Hoeij, editors,
Proc. ISSAC '12, pages 59–66. Grenoble, France,
July 2012.
D. G. Cantor and E. Kaltofen. On fast multiplication of polynomials over arbitrary algebras. Acta Informatica, 28:693–701, 1991.
J. W. Cooley and J. W. Tukey. An algorithm for the machine calculation of complex Fourier series. Math. Computat., 19:297–301, 1965.
M. J. Fischer and L. J. Stockmeyer. Fast on-line integer multiplication. Proc. 5th ACM Symposium on Theory of Computing, 9:67–72, 1974.
J. van der Hoeven. Lazy multiplication of formal power series. In W. W. Küchlin, editor, Proc. ISSAC '97, pages 17–20. Maui, Hawaii, July 1997.
J. van der Hoeven. Relax, but don't be too lazy. JSC, 34:479–542, 2002.
J. van der Hoeven. Relaxed multiplication using the middle product. In Manuel Bronstein, editor, Proc. ISSAC '03, pages 143–147. Philadelphia, USA, August 2003.
J. van der Hoeven. New algorithms for relaxed multiplication. JSC, 42(8):792–802, 2007.
J. van der Hoeven. Relaxed resolution of implicit equations. Technical Report, HAL, 2009. http://hal.archives-ouvertes.fr/hal-00441977.
J. van der Hoeven. Newton's method and FFT trading. JSC, 45(8):857–878, 2010.
J. van der Hoeven. From implicit to recursive equations. Technical Report, HAL, 2011. http://hal.archives-ouvertes.fr/hal-00583125.
J. van der Hoeven. Faster relaxed multiplication. In Proc. ISSAC '14, pages 405–412. Kobe, Japan, July 2014.
R. Lebreton. Relaxed hensel lifting of triangular sets. JSC, 68(2):230–258, 2015.
R. Lebreton and É. Schost. A simple and fast online power series multiplication and its analysis. JSC, 72:231–251, 2016.
A. Sedoglavic. Méthodes seminumériques en algèbre différentielle ; applications à l'étude des propriétés structurelles de systèmes différentiels algébriques en automatique. PhD thesis, École polytechnique, 2001.
A. Schönhage and V. Strassen. Schnelle Multiplikation großer Zahlen. Computing, 7:281–292, 1971.
 ,
, .
. .
.









 for
for