Making fast multiplication of polynomials
numerically stable |
|
| January 21, 2008 |
|
 . This work has
partially been supported by the ANR Gecko project.
. This work has
partially been supported by the ANR Gecko project.
Consider two polynomials
|
Let  be the set of floating point numbers with an
be the set of floating point numbers with an
 -bit mantissa and an
-bit mantissa and an  -bit exponent. Each non-zero number
-bit exponent. Each non-zero number
 of this kind can be written as
of this kind can be written as  , with
, with

In what follows, is assumed to be fixed once and
for all. For the sake of simplicity, we will not study overflows and
underflows in detail and instead make the assumption that has been chosen large enough with respect to the input
data. Consider two polynomials

with coefficients in . For
definiteness, we will assume  ,
,
 ,
,  and
and
 . In this paper, we study the
problem of multiplying
. In this paper, we study the
problem of multiplying  and
and  .
.
Using FFT-multiplication [CT65], the polynomials and can in principle be multiplied
in time  . Here
. Here  is the complexity of
is the complexity of  -bit
integer multiplication [SS71] and it can be assumed that
-bit
integer multiplication [SS71] and it can be assumed that
 increases with .
Alternatively, one may rewrite and as “floating point polynomials”, with an -bit integer exponent and
polynomials with -bit integer
coefficients as mantissas. Using Kronecker's method, we may then
multiply and in time
increases with .
Alternatively, one may rewrite and as “floating point polynomials”, with an -bit integer exponent and
polynomials with -bit integer
coefficients as mantissas. Using Kronecker's method, we may then
multiply and in time
 , where
, where  . If
. If  ,
then this complexity can be improved a bit further into
,
then this complexity can be improved a bit further into  by using
by using  multiplications of degrees
multiplications of degrees  .
.
In the case when the coefficients of are all of
the same order of magnitude, and similarly for , the above algorithms are very efficient and
numerically stable. In section 2, we will give a more
detailed uniform error analysis. Unfortunately, the algorithms are very
unstable if the coefficients of or are not of the same order of magnitude. For instance,
taking  with
with  ,
the transformation of and
into floating point polynomials
,
the transformation of and
into floating point polynomials  and
and  amounts to neglecting the coefficients
amounts to neglecting the coefficients  and
and  . In particular, when
approximating
. In particular, when
approximating  , only the
leading coefficient
, only the
leading coefficient  of the product will be
computed with a satisfactory accuracy.
of the product will be
computed with a satisfactory accuracy.
A situation which arises often in practice is that the above fast multiplication algorithms can be made numerically stable using a suitable scaling

For instance, in the above example when ,
we may multiply and
using

This scaling method is particularly useful in the case when and are truncations of formal
power series. In section 3, we will briefly explain why and
we refer to [vdH02a, Section 6.2] for a more detailed
analysis.
However, fast multiplication with scaling only works in the case when
the coefficients of  have similar orders of
magnitude for a suitable
have similar orders of
magnitude for a suitable  .
Geometrically speaking, this means that the roots of
all lie in a “not so large” annulus around the circle of
radius . In practice, this
condition is not always satisfied, which leaves us with the question of
designing a more general multiplication algorithm which is both
asymptotically fast and numerically stable.
.
Geometrically speaking, this means that the roots of
all lie in a “not so large” annulus around the circle of
radius . In practice, this
condition is not always satisfied, which leaves us with the question of
designing a more general multiplication algorithm which is both
asymptotically fast and numerically stable.
In its full generality, this problem is ill-posed. For instance, in
cases when cancellation occurs, it is impossible to design an algorithm
which computes all coefficients  with a relative
error bounded by
with a relative
error bounded by  . A simple
example of this situation is the computation of
. A simple
example of this situation is the computation of  for
for  ,
,  . Nevertheless, such cancellations can only occur
“below” the “numerical Newton polygon” of
. Nevertheless, such cancellations can only occur
“below” the “numerical Newton polygon” of  : when using the naive
: when using the naive  multiplication algorithm, based on the convolution sums
multiplication algorithm, based on the convolution sums
the coefficients which correspond to vertices of
this Newton polygon are computed accurately, with a relative error
bounded by  . Numerical Newton
polygons will be defined and discussed in section 4. They
are the natural numeric counterpart of Newton polygons for polynomials
with power series coefficients, based on the analogy between floating
point numbers and (Laurent) series, which goes back to Newton himself.
. Numerical Newton
polygons will be defined and discussed in section 4. They
are the natural numeric counterpart of Newton polygons for polynomials
with power series coefficients, based on the analogy between floating
point numbers and (Laurent) series, which goes back to Newton himself.
A reasonable problem is therefore to compute
with a similar kind of accuracy as the naive
multiplication algorithm does, but faster. This also leads to the
question of formalizing what can be meant by “similar kind of
accuracy”. In section 5, we define the notion of
“relative Newton error”  for the
computation of
for the
computation of  . We regard
this notion as the natural generalization of the notion of
“relative error”, when numbers are replaced by numerical
polynomials. In section 9, we will state a few interesting
properties of this concept, which provide further evidence for its
usefulness.
. We regard
this notion as the natural generalization of the notion of
“relative error”, when numbers are replaced by numerical
polynomials. In section 9, we will state a few interesting
properties of this concept, which provide further evidence for its
usefulness.
The central part of the paper is devoted to the description of an asymptotically fast multiplication algorithm which has a good numerical stability in terms of the relative Newton error. The main ideas behind the algorithm are the following:
The product is modeled by a rectangle  in which each pair
in which each pair  corresponds to the computation of
corresponds to the computation of  .
.
Only a subregion  , which
can be determined precisely (section 5), contributes
substantially to the product .
The complement can be neglected.
, which
can be determined precisely (section 5), contributes
substantially to the product .
The complement can be neglected.
The region  can be covered by a suitable
disjoint union of rectangles
can be covered by a suitable
disjoint union of rectangles  (see sections
6 and 7).
(see sections
6 and 7).
The contribution of each such rectangle to
can be computed efficiently using a fast
multiplication algorithm with scaling (section 8).
The main result of the paper is the following:
 with relative Newton error
with relative Newton error  in time ,
provided that
in time ,
provided that  .
.
Let us describe in more detail the second classical multiplication
algorithm mentioned in the introduction, when the coefficients of are of the same order of magnitude, and similarly for
. We start with the
determination of the maximum exponents

and the approximation of  and
and  by integer polynomials
by integer polynomials  and
and  whose coefficients have bit-sizes bounded by . At the second step, we use Kronecker's method for
the multiplication of and . Taking
whose coefficients have bit-sizes bounded by . At the second step, we use Kronecker's method for
the multiplication of and . Taking  ,
the product
,
the product  can be reconstructed [Kro82,
Sch82] from the product of the integers
can be reconstructed [Kro82,
Sch82] from the product of the integers  and
and  . Assuming that
. Assuming that  , these integers have sizes
, these integers have sizes  and
and  ,
whence can be multiplied in time .
We finally obtain an approximation
,
whence can be multiplied in time .
We finally obtain an approximation  of the
product by fitting the coefficients of
of the
product by fitting the coefficients of  into the nearest available floating point numbers in
into the nearest available floating point numbers in  .
.
Let us now analyze the errors induced by the above scheme, where we
recall our assumption that no overflows or underflows occur during our
computations. When computing and by rounding to the nearest, we obtain the uniform absolute
error bounds
where

denotes the sup-norm of if we consider as a vector of coefficients. Consequently,
On the other hand, we also have the bounds
The second bound follows by considering the FFT transforms of , and with respect to a  -th
root of unity
-th
root of unity  . Indeed, the
sup-norms of these transforms satisfy
. Indeed, the
sup-norms of these transforms satisfy

whence

When  , the combination of (1) and (2) yields the (rough) bound
, the combination of (1) and (2) yields the (rough) bound

In the case when  , the
combination of (1) and (3) leads to the same
bound. In all cases, we thus obtain a uniform relative error
bound
, the
combination of (1) and (3) leads to the same
bound. In all cases, we thus obtain a uniform relative error
bound
 |
(4) |
Remark  , and
rely on FFT multiplication of these polynomials. At the price of
improving and
, and
rely on FFT multiplication of these polynomials. At the price of
improving and  . In general, this yields only a
constant speed-up, but in the somewhat exotic case when
. In general, this yields only a
constant speed-up, but in the somewhat exotic case when  , this method still admits a complexity instead of
, this method still admits a complexity instead of  .
.
In the case when the polynomials and are truncations of formal power series  and
and  , the asymptotic
behaviour of the coefficients is usually of the form
, the asymptotic
behaviour of the coefficients is usually of the form
 |
(5) |
for some suitable slowly increasing function  . It is natural to rescale
by considering the polynomial
. It is natural to rescale
by considering the polynomial

with  , since its coefficients
, since its coefficients
 are comparable in magnitude:
are comparable in magnitude:

If has a similar asymptotic behaviour
 |
(6) |
we may then compute using the formula

and the algorithm from the previous section for the multiplication of
and  .
.
Now assume that we also have an asymptotic formula

Then it can be shown that the relative error of each individual
coefficient  is bounded by
is bounded by
 |
(7) |
for all sufficiently large  .
In other words, the multiplication method with scaling amounts to a loss
of
.
In other words, the multiplication method with scaling amounts to a loss
of  bits of precision. Under the assumption that
bits of precision. Under the assumption that
 for a sufficiently large constant
for a sufficiently large constant  , we are thus left with at least
, we are thus left with at least  correct leading bits in the mantissa of each coefficient.
The asymptotic behaviour of
correct leading bits in the mantissa of each coefficient.
The asymptotic behaviour of  is closely related
to the dominant singularities of and and for many interesting applications in combinatorics or
physics, one has
is closely related
to the dominant singularities of and and for many interesting applications in combinatorics or
physics, one has  . For more
details, and the application of this technique to the relaxed
computation of formal power series, we refer to [vdH02a,
Section 6.2].
. For more
details, and the application of this technique to the relaxed
computation of formal power series, we refer to [vdH02a,
Section 6.2].
It sometimes happens that only “limsup versions”

of (5) and (6) are verified. In that case, the individual relative error estimates (7) cease to hold, but we still have the scaled uniform bound
 |
(8) |
which is a direct consequence of the corresponding bound (4) in the previous section.
It also frequently occurs that does not have the
same radius of convergence as ,
in which case we rather have an asymptotic form

Without loss of generality, we may assume that  . When considering the convolution product
. When considering the convolution product
 |
(9) |
we observe that the summands  approximately form
a geometric progression. In first approximation, only the last
approximately form
a geometric progression. In first approximation, only the last  terms therefore contribute to the leading
bits of the result (see figure 1). The computation of can thus be reduced to the computation of the
products
terms therefore contribute to the leading
bits of the result (see figure 1). The computation of can thus be reduced to the computation of the
products

using the notation

When computing each of these products using the scaling  and a doubled precision , the
individual coefficients of
are again obtained with a relative precision of the form
and a doubled precision , the
individual coefficients of
are again obtained with a relative precision of the form  . The total cost of this algorithm is
. The total cost of this algorithm is  , which reduces to
, which reduces to  for large
for large  and fixed . A generalization of this idea will be analyzed in
more detail in section 7.
and fixed . A generalization of this idea will be analyzed in
more detail in section 7.
 |
Roughly speaking, the algorithms from sections 2 and 3 are numerically stable when the roots of
and lie in an annulus around the unit circle
resp. the circle of radius .
When this is no longer the case, one may still try to apply the
algorithm from section 3 for partial products  , using scales which
vary as a function of
, using scales which
vary as a function of  and
and  .
.
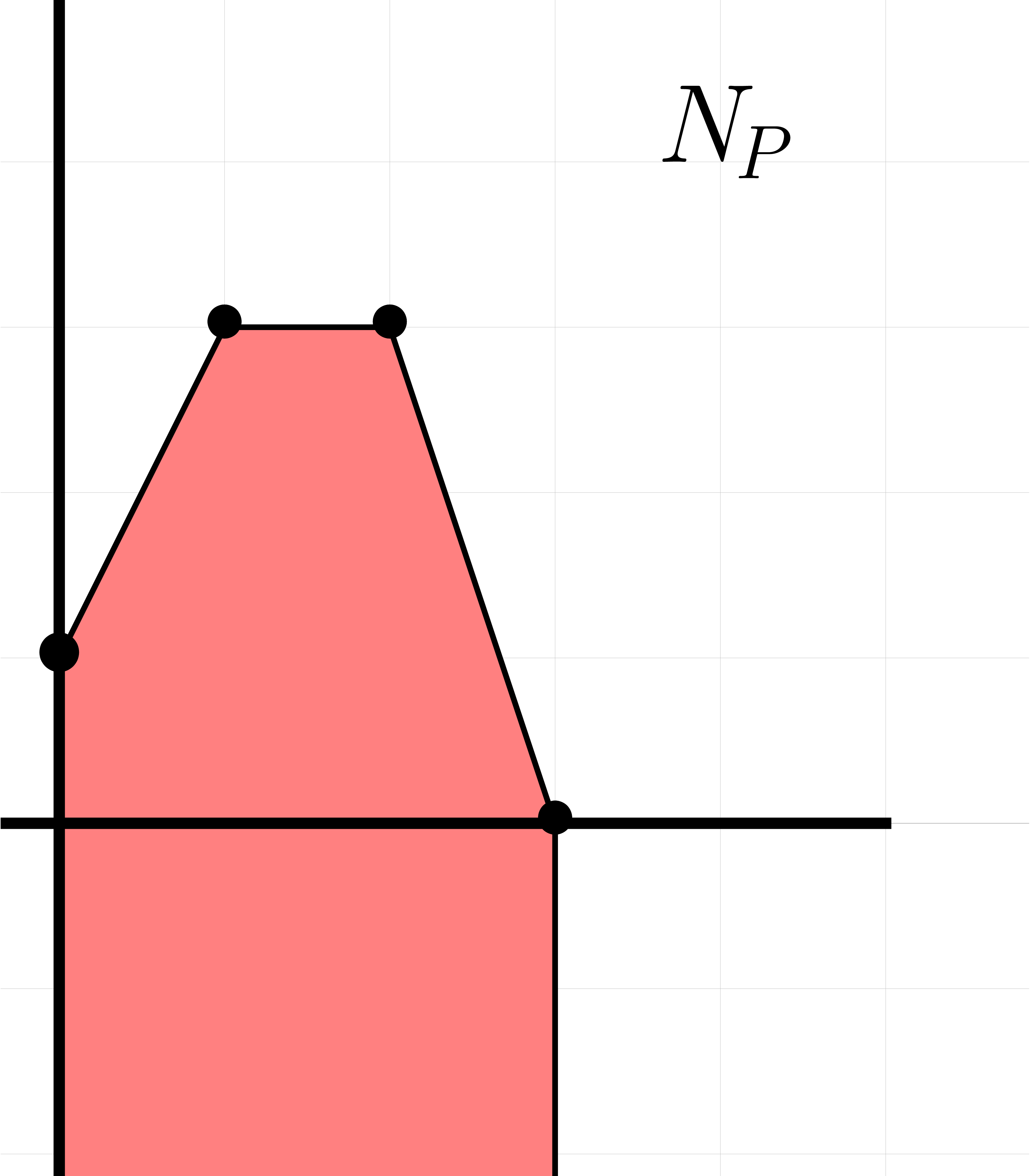
A central concept for doing this is the numeric Newton polygon
 of ,
which is the convex hull of the half-lines
of ,
which is the convex hull of the half-lines  for
all
for
all  , with the convention
that
, with the convention
that  (see figure 2 for two
examples). The numeric Newton polygon is
characterized by its exponent polynomial
(see figure 2 for two
examples). The numeric Newton polygon is
characterized by its exponent polynomial

with coefficients

Equivalently, we may characterize by the first
exponent  and the slopes
and the slopes  with
with  . Notice that
. Notice that  .
.
It is easy to compute the vertices  ,
,
 of the Newton polynomial of
of the Newton polynomial of  by induction over : at each
step, we add
by induction over : at each
step, we add  at the right of the sequence and
repeatedly remove the before last pair
at the right of the sequence and
repeatedly remove the before last pair  as long
as it lies below the edge from
as long
as it lies below the edge from  to
to  . Using this method, the vertices of , as well as the numbers
. Using this method, the vertices of , as well as the numbers  and
and  , can be
computed in linear time.
, can be
computed in linear time.
The scaling operation  has a simple impact on
exponent polynomials:
has a simple impact on
exponent polynomials:

The norms of and and
their exponent polynomials are related by
since the maximum  -value of a
convex hull of a set of pairs
-value of a
convex hull of a set of pairs  coincides with the
maximum -values of the points
themselves.
coincides with the
maximum -values of the points
themselves.
 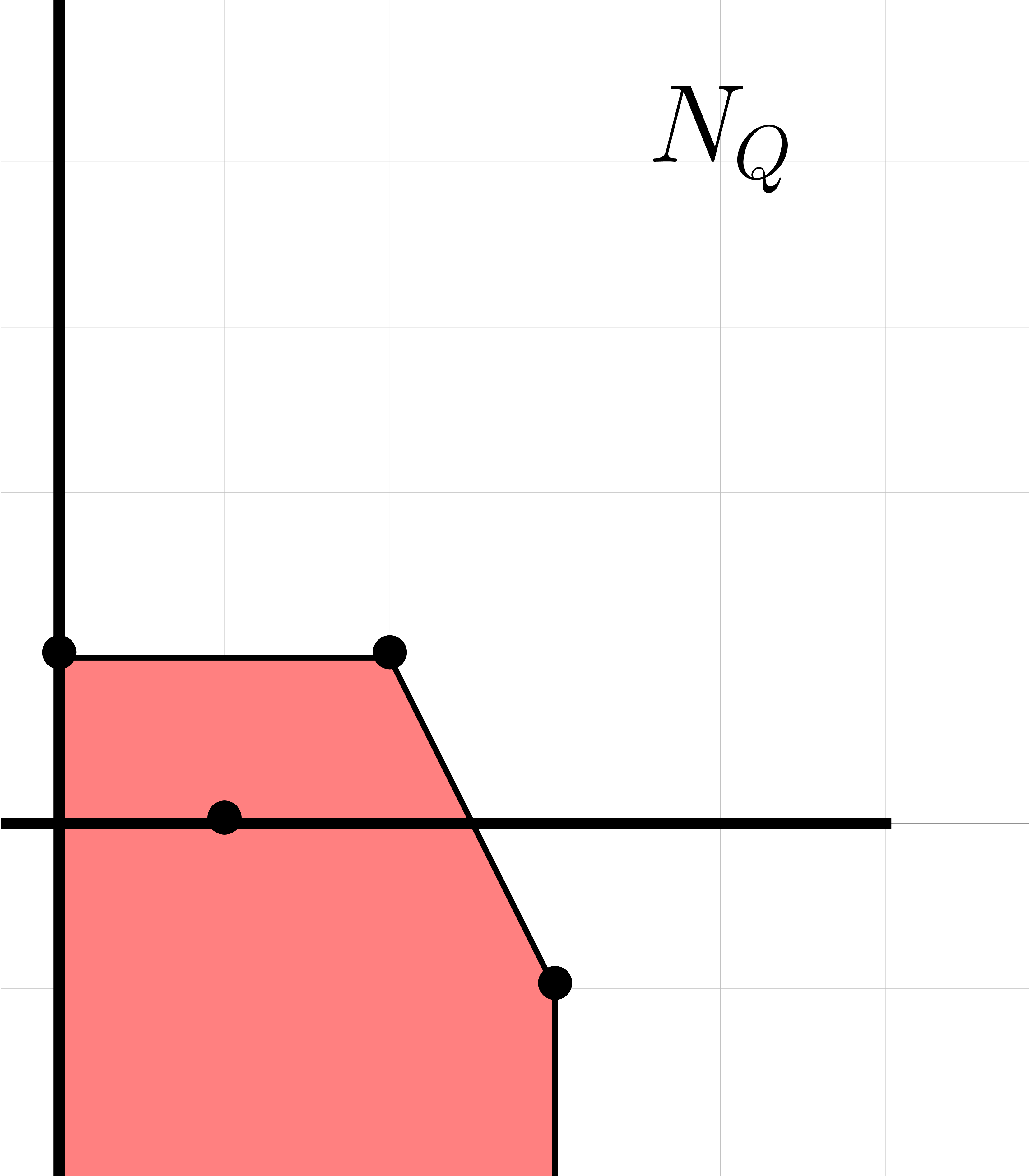 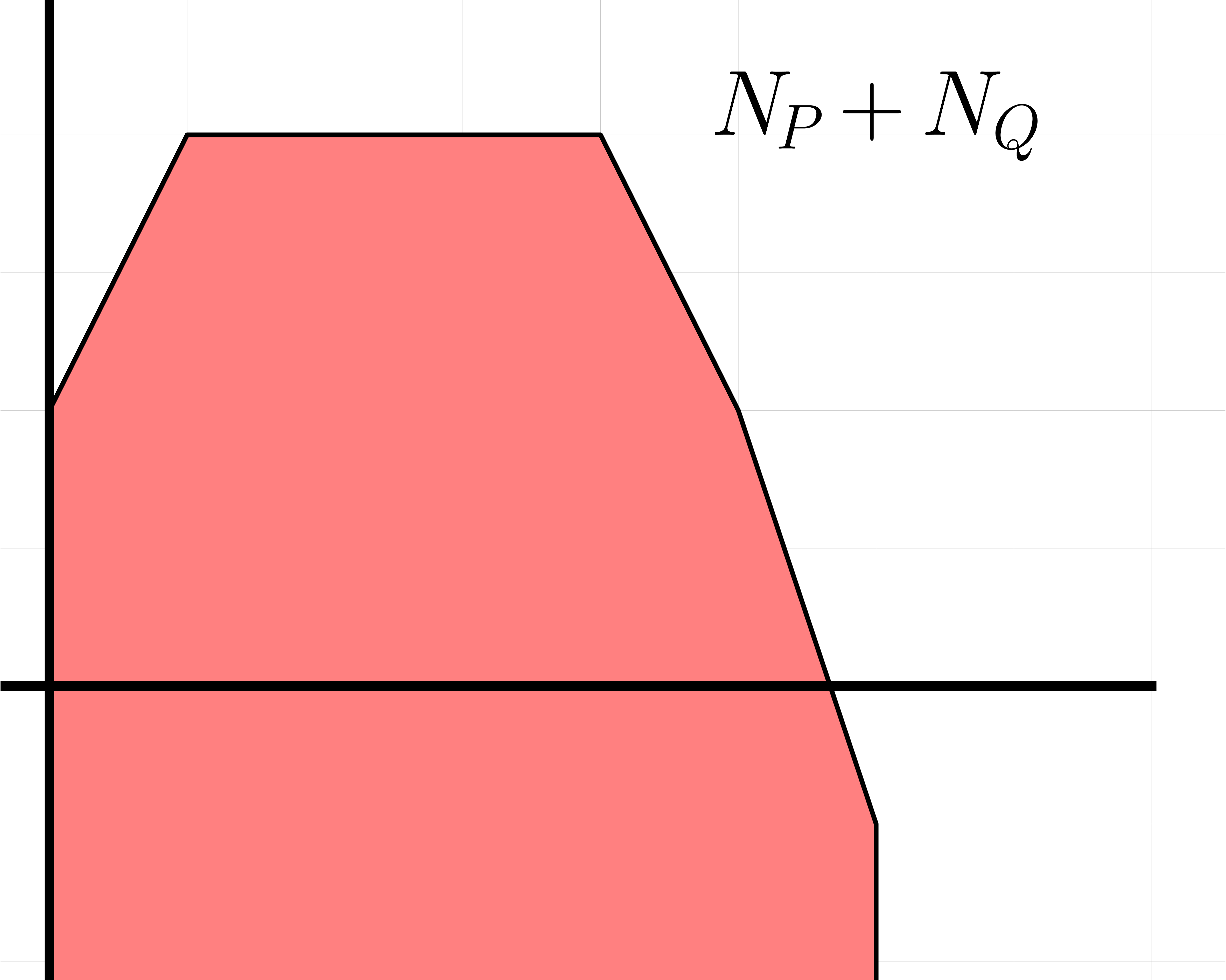 |
Recall that the Minkowski sum of the convex sets and  is defined by
is defined by

An example of a Minkowski sum is shown in figure 2. It is
convenient to regard  and
and  as “max-plus polynomials” over the semi-algebra
as “max-plus polynomials” over the semi-algebra  in which multiplication and addition are replaced by
addition and the operator
in which multiplication and addition are replaced by
addition and the operator  .
These polynomials are convex in the sense that its sequences of
coefficients are convex. The exponent polynomial of
.
These polynomials are convex in the sense that its sequences of
coefficients are convex. The exponent polynomial of  may then be reinterpreted as a “product” of polynomials:
may then be reinterpreted as a “product” of polynomials:

Clearly,  , and it is easily
shown that the slopes of are obtained by merging
the ordered lists and
, and it is easily
shown that the slopes of are obtained by merging
the ordered lists and  . This provides us with a linear-time algorithm for
the computation of
. This provides us with a linear-time algorithm for
the computation of  as a function of and . The
crucial property of is that it approximates
as a function of and . The
crucial property of is that it approximates  well.
well.
Proof. Let  .
Applying (2) and (3), we have
.
Applying (2) and (3), we have

Using (11) and the fact that  ,
we obtain
,
we obtain

Given arbitrary convex max-plus polynomials  and
and
 with
with  ,
it therefore suffices to show that
,
it therefore suffices to show that

Indeed, for  , let
, let  be such that
be such that  .
Then
.
Then

The relation  is proved similarly.
is proved similarly.
It is classical that the numeric properties of a polynomial can be greatly effected by slightly modifying one of its
coefficients. For instance, if  ,
then its root can move from
,
then its root can move from  to
to  , when modifying its coefficient
, when modifying its coefficient  by an amount as small as
by an amount as small as  .
Nevertheless, as we will detail in section 9, one may
expect that many of the numeric properties of do
not sensibly change if we modify a coefficient
.
Nevertheless, as we will detail in section 9, one may
expect that many of the numeric properties of do
not sensibly change if we modify a coefficient  by less than
by less than  .
.
If the coefficients of
are known with absolute errors  ,
this motivates us to introduce the relative Newton error of
by
,
this motivates us to introduce the relative Newton error of
by

For instance, if is an approximation of the
product , then its relative
Newton error would typically be given by

Alternatively, we may regard as the minimal
uniform error of the approximations  for all
possible scales :
for all
possible scales :
In this section and the subsequent sections, we propose an efficient
algorithm for computing an approximation ,
which is numerically stable in the sense that is
small.
The first main idea behind Newton multiplication is that only part of
the products substantially contribute to : the pair
and the corresponding product are said to be
negligible if

Indeed, when neglecting the sum of all such products in the computation
of , the corresponding
increase of the relative Newton error is bounded by  . This follows from proposition 3
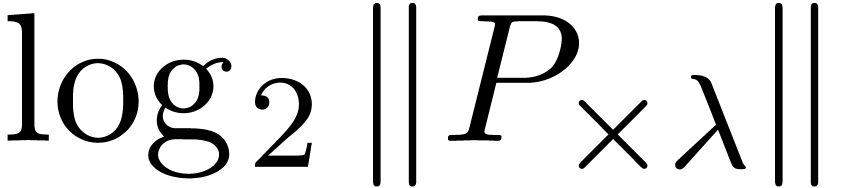
and the fact that there are at most pairs which contribute to a fixed coefficient . The left-hand picture in figure 3
illustrates a typical zone of non-negligible contributions . The lower and upper limits
. This follows from proposition 3
and the fact that there are at most pairs which contribute to a fixed coefficient . The left-hand picture in figure 3
illustrates a typical zone of non-negligible contributions . The lower and upper limits  and
and  of this zone are increasing functions in
of this zone are increasing functions in
 and can therefore be determined in linear time
as a function of and .
and can therefore be determined in linear time
as a function of and .
A set  of pairs is said
to be negligible if each of its elements is negligible. A partial
product is said to be negligible if
is negligible and admissible if there
exists no proper subrectangle
of pairs is said
to be negligible if each of its elements is negligible. A partial
product is said to be negligible if
is negligible and admissible if there
exists no proper subrectangle  of such that
of such that  is negligible. Clearly,
any non-negligible partial product gives rise to
a unique admissible partial product
is negligible. Clearly,
any non-negligible partial product gives rise to
a unique admissible partial product  by taking
to be the smallest subrectangle whose complement
in is negligible. Any subdivision
by taking
to be the smallest subrectangle whose complement
in is negligible. Any subdivision
 |
(12) |
therefore gives rise to a new disjoint union
 |
(13) |
of admissible subrectangles, whose complement in  is negligible. The second disjoint union will be called the
admissible part of the first one. The right-hand side of figure
3 illustrates the admissible part of a so-called product
subdivision (see section 7 below).
is negligible. The second disjoint union will be called the
admissible part of the first one. The right-hand side of figure
3 illustrates the admissible part of a so-called product
subdivision (see section 7 below).
Our next task is to find a suitable subdivision (12) with
admissible part (13), such that  can
be computed both efficiently and in a numerically stable way. The second
main idea behind Newton multiplication is to search for a subdivision
such that the products
can
be computed both efficiently and in a numerically stable way. The second
main idea behind Newton multiplication is to search for a subdivision
such that the products  can be performed using
suitable scalings and such that the rectangles
can be performed using
suitable scalings and such that the rectangles  are yet reasonably large. As a first step in this construction, we will
approximate the Newton polygons of and by simpler ones, merging those edges whose slopes differ
only by a small amount.
are yet reasonably large. As a first step in this construction, we will
approximate the Newton polygons of and by simpler ones, merging those edges whose slopes differ
only by a small amount.
Given a slope  and a convex max-plus polynomial
and a convex max-plus polynomial
 , we define the
, we define the  -discrepancy
-discrepancy  of by
of by

Then the individual exponents  of
of  lie in a strip of height :
lie in a strip of height :
 |
(14) |
In the particular case when equals the main
slope of ,

we call  the discrepancy of and also denote it by
the discrepancy of and also denote it by  .
For any and any second convex max-plus
polynomial
.
For any and any second convex max-plus
polynomial  , the convexity of
and implies
, the convexity of
and implies
More generally, one defines the -discrepancy
 of on a range
of on a range  by
by  and similarly
and similarly  . We have
. We have
for any subdivision of the range  into and
into and  .
.
Let us now return to the approximation of the Newton polygon by a new one with fewer edges. Let  be an arbitrary but fixed constant, such as
be an arbitrary but fixed constant, such as  , and denote
, and denote  .
We now construct the sequence
.
We now construct the sequence  by taking each
by taking each
 maximal such that
maximal such that  (see
figure 4 below). Using the convexity of , it is not hard to check that this
construction can be done in linear time using a single traversal of
(see
figure 4 below). Using the convexity of , it is not hard to check that this
construction can be done in linear time using a single traversal of
 . The edges of between and
. The edges of between and  are well-approximated by a single edge from
are well-approximated by a single edge from  to
to
 . A similar sequence
. A similar sequence  is constructed for .
is constructed for .
A first candidate for the subdivision (12) is the product subdivision:
 |
(18) |
where the and  are as in
the previous section. Figure 3 shows an example of a
product subdivision.
are as in
the previous section. Figure 3 shows an example of a
product subdivision.
 , there exist at most
, there exist at most  rectangles in the product subdivision, for which
the admissible part contains a pair
rectangles in the product subdivision, for which
the admissible part contains a pair  with
with  .
.
Proof. Assume the contrary and let  and
and  be the top left and bottom
right rectangles in the product subdivision, for which the admissible
parts contribute to . We have
be the top left and bottom
right rectangles in the product subdivision, for which the admissible
parts contribute to . We have
 or
or  .
By symmetry, we may assume . Now consider the
convex max-plus polynomials
.
By symmetry, we may assume . Now consider the
convex max-plus polynomials

Using (17), we have  .
From (15) and (16), we thus get
.
From (15) and (16), we thus get

Now  coincides with
coincides with  ,
whence there exists an index
,
whence there exists an index  with
with

which means that the pair  is negligible. But
this is only possible if either
is negligible. But
this is only possible if either  or
or  is also negligible. This, in its turn, implies that either
the rectangle or the rectangle
is negligible, in contradiction with our hypothesis.
is also negligible. This, in its turn, implies that either
the rectangle or the rectangle
is negligible, in contradiction with our hypothesis.
 non-negligible
rectangles in the product subdivision, and they can be computed in
linear time.
non-negligible
rectangles in the product subdivision, and they can be computed in
linear time.
Proof. The first assertion follows from the
facts that each diagonal  with
with  intersects at most rectangles and that there are
less than
intersects at most rectangles and that there are
less than  such diagonals. The rectangles can be
computed in time , by
following the lower and upper limits
such diagonals. The rectangles can be
computed in time , by
following the lower and upper limits  and
and  of the zone of non-negligible pairs.
of the zone of non-negligible pairs.
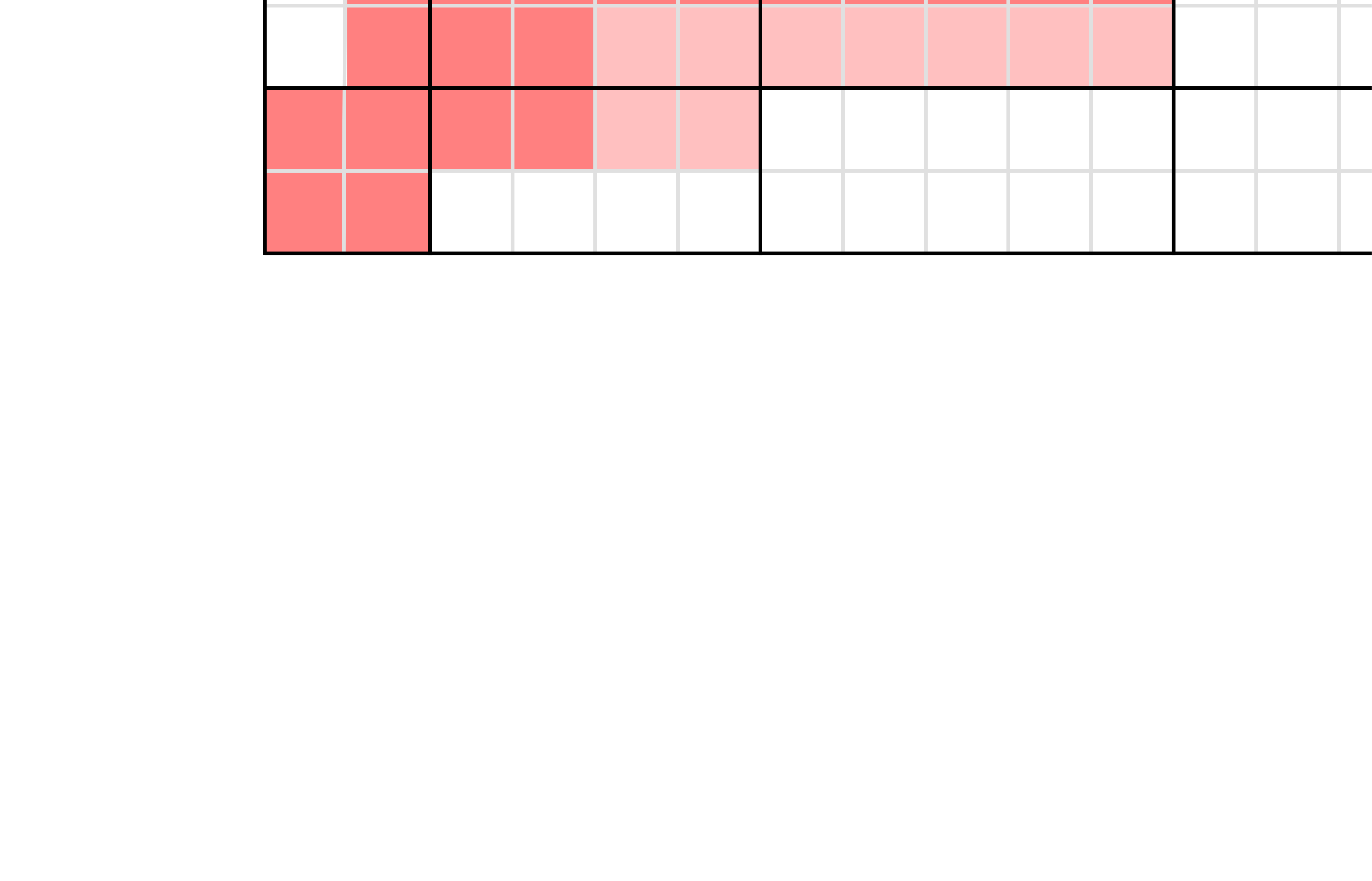
The subdivision we are really after refines (18). More
precisely, consider a non-negligible rectangle
of the form . Let

be the slope of on .
Swapping and if
necessary, we may assume without loss of generality that  . We now construct the sequence
. We now construct the sequence  , by choosing each
, by choosing each  minimal such that
minimal such that  , and
subdivide
, and
subdivide
 |
(19) |
We may re-interpret figure 1 as an illustration of the
non-negligible pairs inside the rectangle ,
together with the subdivision (19) and its corresponding
admissible part. Performing the replacement (19) for all
non-negligible rectangles in (18),
while leaving the negligible rectangles untouched, we obtain a finer
subdivision of , which we
call the Newton subdivision.
, there exist at most  rectangles in the Newton subdivision, for which the
admissible part contains a pair with .
rectangles in the Newton subdivision, for which the
admissible part contains a pair with .
Proof. Consider a non-negligible rectangle  in the product subdivision. In view of lemma (4), it suffices to show that there exists at most
in the product subdivision. In view of lemma (4), it suffices to show that there exists at most  rectangles in the admissible part of its subdivision (19) which contribute to .
rectangles in the admissible part of its subdivision (19) which contribute to .
Now assume that  and
and  satisfy
satisfy  and assume that
and assume that  satisfy
satisfy  . Setting
. Setting  , we then have
, we then have

whence

This shows that the pair  is negligible. We
conclude that the diagonal intersects at most
admissible rectangles.
is negligible. We
conclude that the diagonal intersects at most
admissible rectangles.
non-negligible
rectangles in the Newton subdivision, and they can be computed in
linear time.
We can now describe our algorithm for computing the product . We start by the computation of the admissible
part of the Newton subdivision. For each rectangle
in this admissible part, we compute its contribution to
as follows. By construction, we have  or for
or for  or
or  . Setting ,
we compute the contribution
. Setting ,
we compute the contribution  of
to using the multiplication method with scaling
from section 3,
of
to using the multiplication method with scaling
from section 3,
 |
(20) |
using a precision of  instead of
bits. The final result is obtained by summing
all partial products using straightforward
floating point arithmetic. This algorithm leads to the following
refinement of theorem 1.
instead of
bits. The final result is obtained by summing
all partial products using straightforward
floating point arithmetic. This algorithm leads to the following
refinement of theorem 1.
, which computes with
relative Newton error
 |
(21) |
Proof. We claim that the computation of the
product (20) using a precision of  bits contributes to the relative Newton error of the global product
bits contributes to the relative Newton error of the global product  by an amount which is bounded by
by an amount which is bounded by  . This clearly implies (21), since
for a fixed coefficient in the product, at most
. This clearly implies (21), since
for a fixed coefficient in the product, at most
 partial products of the form
contribute to .
partial products of the form
contribute to .
Setting  ,
,  and
and  , the bound (8)
yields
, the bound (8)
yields

For any  , the bounds (2), (14) and proposition 3 also
imply
, the bounds (2), (14) and proposition 3 also
imply

Combining both estimates, we obtain
This completes the proof of our claim.
The proof of the complexity bound relies on lemma 6. Let
be the admissible part of the Newton subdivision and let  . Consider the total length
. Consider the total length
of the left borders and the lower borders of all rectangles  . Since every diagonal hits the union of these
borders in at most
. Since every diagonal hits the union of these
borders in at most  points, we have
points, we have  . The total cost of all multiplications is therefore bounded by
. The total cost of all multiplications is therefore bounded by

This completes the proof of our theorem.
Remark  .
.
Now that we have an efficient multiplication which is numerically stable in terms of the relative Newton error, it is interesting to investigate this concept a bit closer. First of all, its name is justified by the property

which follows from proposition 3. Some natural numeric
quantities associated to a numeric polynomial
are its coefficients, its roots and its evaluations at points. For our
notion of relative Newton error to be satisfactory, a small relative
Newton error should therefore imply small relative errors for the
coefficients, the roots and evaluations at points.
Now the example  from the introduction shows that
it is impossible to obtain good relative errors for all coefficients.
Nevertheless, given a polynomial with a small
relative Newton error
from the introduction shows that
it is impossible to obtain good relative errors for all coefficients.
Nevertheless, given a polynomial with a small
relative Newton error  , we
can at least guarantee small relative errors
, we
can at least guarantee small relative errors  for
those coefficients which correspond to vertices
for
those coefficients which correspond to vertices
 of the Newton polygon. For most practical
purposes, we expect this to be sufficient. However, theoretically
speaking, the naive multiplication algorithm of polynomials sometimes
provides better relative errors for other coefficients. This is for
instance the case when squaring a polynomial of the form
of the Newton polygon. For most practical
purposes, we expect this to be sufficient. However, theoretically
speaking, the naive multiplication algorithm of polynomials sometimes
provides better relative errors for other coefficients. This is for
instance the case when squaring a polynomial of the form  , where
, where  is very small
compared to
is very small
compared to  .
.
For what follows, it will be convenient to redefine  . Let
. Let  denote the set of
roots of , ordered by
increasing magnitudes
denote the set of
roots of , ordered by
increasing magnitudes  . By
analogy with the power series setting, the norms
. By
analogy with the power series setting, the norms  roughly correspond to the slopes of the Newton
polygon. We expect the existence of a bound
roughly correspond to the slopes of the Newton
polygon. We expect the existence of a bound

although we have not yet proved this. The worst case arises when admits a single root of multiplicity .
We define the relative distance  between
between
 (not both zero) by
(not both zero) by
and the relative distance  between
between  and
and  , counted
with multiplicities, by
, counted
with multiplicities, by

Clearly, the relative error of the evaluation of
at increases when
approaches . The following
proposition shows that the relative error of  can
be kept small as long as is sufficiently large.
can
be kept small as long as is sufficiently large.
Proof. Modulo a suitable scaling and
multiplication of  by a constant, we may assume
without loss of generality that
by a constant, we may assume
without loss of generality that  and
and  . We claim that
. We claim that  .
Indeed,
.
Indeed,

so, considering FFT transforms with respect to a  -th root of unity
-th root of unity  ,
we get
,
we get

Since , its coefficients are
known with absolute errors  .
We can therefore evaluate with absolute error
.
We can therefore evaluate with absolute error
 and relative error
and relative error  .
.
Let us finally consider the computation of the roots  in the case when is known with relative Newton
error . The worst case again
arises when
in the case when is known with relative Newton
error . The worst case again
arises when  has a single root of multiplicity
. Indeed, a relative error
has a single root of multiplicity
. Indeed, a relative error
 inside gives rise to a
relative error
inside gives rise to a
relative error  for
for  ,
so that we cannot expect anything better than
,
so that we cannot expect anything better than  for each . Nevertheless,
given an isolated root
for each . Nevertheless,
given an isolated root  and
and  , we have
, we have  and
and

Using a similar argument as in the proof of proposition 10, it follows that
Indeed, after reduction to the case when  and
, we combine the facts that
and
, we combine the facts that
 ,
,  and
and
 .
.
In this paper, we have presented a fast multiplication algorithm for
polynomials over , which is
numerically stable in a wide variety of cases. In order to capture the
increased stability in a precise theorem, we have shown the usefulness
of numeric Newton polygons and the relative Newton error. Even though
our algorithm was presented in the case of real coefficients, it is
straightforward to generalize it to the complex case.
Multiplication being the most fundamental operation on polynomials, it can be hoped that fast and numerically stable algorithms for other operations (division, g.c.d., multi-point evaluation, etc.) can be developed along similar lines. This might for instance have applications to polynomial root finding [Pan96]. Indeed, an operation such as the Graeffe transform can be done both efficiently and accurately using our algorithm.
The multiplication algorithm with scaling from [vdH02a,
Section 6.2] and section 3 has been implemented inside the
 terms
of
terms
of  with a
with a  -bit
precision typically takes about one minute. One reason behind this
efficiency stems from the reduction to Kronecker multiplication. Indeed,
multiple precision libraries for floating point numbers, such as
-bit
precision typically takes about one minute. One reason behind this
efficiency stems from the reduction to Kronecker multiplication. Indeed,
multiple precision libraries for floating point numbers, such as
Only a preliminary version of Newton multiplication has been implemented
so far inside
J.W. Cooley and J.W. Tukey. An algorithm for the machine calculation of complex Fourier series. Math. Computat., 19:297–301, 1965.
T. Granlund et al. GMP, the GNU multiple precision arithmetic library.
http://www.swox.com/gmp, 1991.
G. Hanrot, V. Lefèvre, K. Ryde, and P. Zimmermann. MPFR, a C library for multiple-precision floating-point computations with exact rounding. http://www.mpfr.org, 2000.
L. Kronecker. Grundzüge einer arithmetischen Theorie der algebraischen Grössen. Jour. für die reine und ang. Math., 92:1–122, 1882.
Victor Y. Pan. On approximating complex polynomial zeros: Modified quadtree (Weyl's) construction and improved Newton's iteration. Technical Report RR-2894, INRIA Sophia, 1996.
A. Schönhage. Asymptotically fast algorithms for the numerical multiplication and division of polynomials with complex coefficients. In J. Calmet, editor, EUROCAM '82: European Computer Algebra Conference, volume 144 of Lect. Notes Comp. Sci., pages 3–15, Marseille, France, April 1982. Springer.
A. Schönhage and V. Strassen. Schnelle Multiplikation grosser Zahlen. Computing, 7:281–292, 1971.
J. van der Hoeven. Relax, but don't be too lazy. JSC, 34:479–542, 2002.
J. van der Hoeven et al. Mathemagix, 2002. http://www.mathemagix.org.
 with multiple precision floating point coefficients.
Although the product
with multiple precision floating point coefficients.
Although the product 

 and
and  with
with  .
. .
. leading bits of
leading bits of 

 and
and  and the Minkowski sum of these polygons.
and the Minkowski sum of these polygons.
 .
.
 and the light squares to
products where we only have
and the light squares to
products where we only have  .
. formed by the
thin black rectangles.
formed by the
thin black rectangles.


 .
. and
and  fit into the indicated strips of
heights
fit into the indicated strips of
heights  and
and  .
. is a straight segment which fits
into a strip of height
is a straight segment which fits
into a strip of height  .
. is bounded by
is bounded by